
树莓派5
•搭载四核 Cortex A76,性能是树莓派4B的2~3倍•新增RP1 I/O控制器,采用32位LPDDR4X SDRAM
•5.1V5A电源输入,硬件配置全面升级
•提供丰富全面的资料课程,1对1技术支持
 1.Open Source CV简介
2.Open Source CV图片读取与展示
3.Open Source CV图片写入
4.Open Source CV图像质量
5.Open Source CV像素操作
1.ros简介
2.ros安装
3.ros常用命令工具
4.ros工作空间
5.ros功能包
6.ros节点
7.ros话题发布者
8.ros话题订阅者
9.ros服务客户端
10.ros服务服务端
11.ros动作客户端
12.ros动作服务端
13.ros自定义接口消息
14.ros-launch文件
15.ros-TF变换
16.ros参数服务
17.ros-rviz使用
18.ros-rqt工具使用
19.ros话题消息录制与播放
20.ros-urdf模型介绍
21.ros-gazebo介绍
22.ros分布式通讯
1.AR视觉
2.AR二维码
3.ROS+Opencv基础
4.Opencv应用——人脸识别
5.Opencv应用——harris角点检测
6.Opencv应用——目标追踪算法
7.Opencv应用——轮廓矩
8.Opencv应用——多边形轮廓
9.Opencv应用——离散傅里叶变换算法
10.Opencv应用——边缘检测算法
11.Opencv应用——人脸检测算法
12.Opencv应用——光流检测算法
13.Opencv应用——轮廓检测
14.Opencv应用——一般轮廓检测
15.Opencv应用——特征点追踪
16.Opencv应用——HLS颜色过滤
17.Opencv应用——霍夫圆检测
18.Opencv应用——霍夫直线检测
19.Opencv应用——HSV颜色过滤
20.Opencv应用——LK光流算法
21.Opencv应用——人体检测算法
22.Opencv应用——相位相关位移检测
23.Opencv应用——图像金字塔采样算法
24.Opencv应用——RGB颜色过滤
25.Opencv应用——清除背景检测算法
26.Opencv应用——精简光流算法
27.Opencv应用——简单过滤器
28.Opencv应用——阈值图像处理
29.Opencv应用——分水岭分割算法
1.ROS2简介
2.ROS2安装Humble
3.ROS2集成开发环境搭建
4.ROS2工作空间
5.ROS2功能包
6.ROS2节点
7.ROS2话题通讯
8.ROS2服务通讯
9.ROS2动作通讯
10.ROS2自定义接口消息
11.ROS2参数服务案例
12.ROS2元功能包介绍
13.ROS2分布式通讯
14.ROS2 DDS
15.ROS2时间相关API
16.ROS2常用命令工具
17.ROS2 Rviz2使用
18.ROS2 Rqt工具箱
19.ROS2 Launch启动文件配置
20.ROS2录制回放工具
21.ROS2 URDF模型
22.ROS2 Gazebo仿真平台
23.ROS2 TF2坐标变换
0.AI大模型镜像说明
1.AI大模型环境部署
2.中文输入法切换
3.大模型对话平台安装
4.Meta AI:Llama3.2模型
5.阿里云:Qwen3模型
6.微软:Phi-4-mini模型
7.DeepSeek:DeepSeek-R1模型
8.阿里云:Qwen2.5vl视觉多模态大模型
9.谷歌:Gemma3视觉多模态大模型
10.Llava视觉多模态大模型
11.MiniCPM-V视觉多模态大模型
12.多模态视觉理解应用
13.多模态文生图应用
14.多模态视频分析应用
15.多模态视觉定位应用
16.多模态表格扫描应用
17.多模态自主代理应用
1.OpenClaw 部署
2.OpenClaw 与WhatsApp插件的应用
3.OpenClaw 与飞书插件的应用
4.OpenClawWebChat 交互
5.OpenClawTUI 交互
6.OpenClaw 工具介绍
7.OpenClawGate 网关运行手册
8.OpenClaw 插件功能介绍
9.OpenClawClawHub 介绍(skill 安装)
10.OpenClaw 应用之文件管理
11.OpenClaw 应用之照相机
12.OpenClaw 应用之浏览器控制
13.OpenClaw 应用之脚本执行
14.OpenClaw 应用之 AI 编程(外设 & GPIO 控制)
15.OpenClaw 应用之专属 AI 助理
1.Open Source CV简介
2.Open Source CV图片读取与展示
3.Open Source CV图片写入
4.Open Source CV图像质量
5.Open Source CV像素操作
1.ros简介
2.ros安装
3.ros常用命令工具
4.ros工作空间
5.ros功能包
6.ros节点
7.ros话题发布者
8.ros话题订阅者
9.ros服务客户端
10.ros服务服务端
11.ros动作客户端
12.ros动作服务端
13.ros自定义接口消息
14.ros-launch文件
15.ros-TF变换
16.ros参数服务
17.ros-rviz使用
18.ros-rqt工具使用
19.ros话题消息录制与播放
20.ros-urdf模型介绍
21.ros-gazebo介绍
22.ros分布式通讯
1.AR视觉
2.AR二维码
3.ROS+Opencv基础
4.Opencv应用——人脸识别
5.Opencv应用——harris角点检测
6.Opencv应用——目标追踪算法
7.Opencv应用——轮廓矩
8.Opencv应用——多边形轮廓
9.Opencv应用——离散傅里叶变换算法
10.Opencv应用——边缘检测算法
11.Opencv应用——人脸检测算法
12.Opencv应用——光流检测算法
13.Opencv应用——轮廓检测
14.Opencv应用——一般轮廓检测
15.Opencv应用——特征点追踪
16.Opencv应用——HLS颜色过滤
17.Opencv应用——霍夫圆检测
18.Opencv应用——霍夫直线检测
19.Opencv应用——HSV颜色过滤
20.Opencv应用——LK光流算法
21.Opencv应用——人体检测算法
22.Opencv应用——相位相关位移检测
23.Opencv应用——图像金字塔采样算法
24.Opencv应用——RGB颜色过滤
25.Opencv应用——清除背景检测算法
26.Opencv应用——精简光流算法
27.Opencv应用——简单过滤器
28.Opencv应用——阈值图像处理
29.Opencv应用——分水岭分割算法
1.ROS2简介
2.ROS2安装Humble
3.ROS2集成开发环境搭建
4.ROS2工作空间
5.ROS2功能包
6.ROS2节点
7.ROS2话题通讯
8.ROS2服务通讯
9.ROS2动作通讯
10.ROS2自定义接口消息
11.ROS2参数服务案例
12.ROS2元功能包介绍
13.ROS2分布式通讯
14.ROS2 DDS
15.ROS2时间相关API
16.ROS2常用命令工具
17.ROS2 Rviz2使用
18.ROS2 Rqt工具箱
19.ROS2 Launch启动文件配置
20.ROS2录制回放工具
21.ROS2 URDF模型
22.ROS2 Gazebo仿真平台
23.ROS2 TF2坐标变换
0.AI大模型镜像说明
1.AI大模型环境部署
2.中文输入法切换
3.大模型对话平台安装
4.Meta AI:Llama3.2模型
5.阿里云:Qwen3模型
6.微软:Phi-4-mini模型
7.DeepSeek:DeepSeek-R1模型
8.阿里云:Qwen2.5vl视觉多模态大模型
9.谷歌:Gemma3视觉多模态大模型
10.Llava视觉多模态大模型
11.MiniCPM-V视觉多模态大模型
12.多模态视觉理解应用
13.多模态文生图应用
14.多模态视频分析应用
15.多模态视觉定位应用
16.多模态表格扫描应用
17.多模态自主代理应用
1.OpenClaw 部署
2.OpenClaw 与WhatsApp插件的应用
3.OpenClaw 与飞书插件的应用
4.OpenClawWebChat 交互
5.OpenClawTUI 交互
6.OpenClaw 工具介绍
7.OpenClawGate 网关运行手册
8.OpenClaw 插件功能介绍
9.OpenClawClawHub 介绍(skill 安装)
10.OpenClaw 应用之文件管理
11.OpenClaw 应用之照相机
12.OpenClaw 应用之浏览器控制
13.OpenClaw 应用之脚本执行
14.OpenClaw 应用之 AI 编程(外设 & GPIO 控制)
15.OpenClaw 应用之专属 AI 助理
镜像名称:Pi-OS-ROS_2024_01_05.img
原始系统版本:2023-12-05-raspios-bookworm-arm64
树莓派系统信息:
账号:pi
密码:yahboom
WiFi热点:
名称:Pi_Hot
密码:12345678
访问jupyterlab:IP:8888
jupyterlab密码:yahboom
环境:Python 3.11.2、Opencv 4.8.1、Docker、Jupyter lab
功能:开启SSH、VNC,Docker(ROS1、ROS2)、开机自启热点等
树莓派出厂镜像默认是热点模式,如果需要将树莓派热点模式关闭连接WiFi,请按照下面操作:
1、有显示器
树莓派主板连接显示器,直接关闭热点,连接WiFi!
2、无显示器
①:点击右上角“WiFi”图标→高级设置(Advanced Options)→编辑连接(Edit Connections...);
②:网络连接界面,点击左下角的“+”选项,创建一个WiFi连接,需要设置以下内容:
SSID:WiFi名称;
General:勾选“Connect automatically with priority”,并将优先级提高,建议设置的数字≥2,热点模式设置的是1,所以WiFi连接的优先级需要大于热点的优先级;
WiFi Security:若有密码的使用“WPA/WPA2/WPA3 Personal”,然后将密码输入;
③:设置以上选项后,树莓派重启就会优先连接WiFi!
④:查找树莓派IP:树莓派开关机时,arp -a或Advanced IP Scanner软件扫描的结果变化的那个IP地址就是树莓派主板IP地址。
可以使用arp -a命令:arp -a命令只会列出本地计算机已解析的IP地址与对应的MAC地址;
Advanced IP Scanner软件:搜索同一局域网下的设备IP地址(建议使用Advanced IP Scanner)。
⑤:远程登录树莓派系统控制
如果树莓派5使用的电源适配器不符合树莓派官方电源适配器标准,开机会显示低电压提醒并将外围设备电流限制为600mA!
1、连接问题:
若VNC拒绝连接,可以通过SSH远程登陆系统,看相关配置是否开启(详细教程查看【树莓派基础设置】教程)!
2、远程分辨率问题:
树莓派连接显示屏时,远程控制的分辨率以屏幕设置的分辨率为准;
树莓派未连接显示屏时,远程控制的分辨率以系统设置的分辨率为准。
3、若正在通过VNC远程控制的,直接连接显示屏可能会出现显示屏不显示,VNC无法连接,这种情况重启树莓派主板即可!
1、连接问题:先连接电源线,再连接HDMI线;
2、部分显示屏需要设置成产品相对应的分辨率才可以正常显示;
3、若正在通过VNC远程控制的,直接连接显示屏可能会出现显示屏不显示,VNC无法连接,这种情况重启树莓派主板即可!
例如:要找到USB摄像头的设备号,重新插拔一下,再输入命令ls -l /dev/video*
根据时间戳可以看到,刚刚接入的摄像头分配到了video8和video9

在文件根目录下,可以看到我们提供的docker.sh脚本,运行即可进入对应的dockerROS环境

输入命令:docker save -o xxx.tar IMAGEid
可在当前目录下生成此docker镜像的离线文件
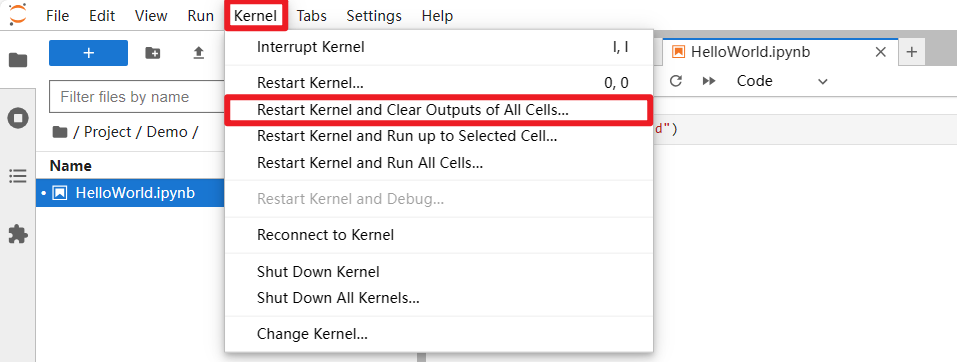
若代码块在运行过程中出现异常问题,可以重启所有内核和清除所有代码块输出:
进入Docker容器的脚本并没有添加主机video*设备,如果运行ROS1/2视觉应用,需要自己在脚本添加主机video设备。
可以在脚本文件中添加下面一行代码:具体设备号可根据自己系统来修改
--device=/dev/video0 \
树莓派现象:树莓派开机指示灯短闪3次,快闪1次;无法启动系统!
表格是常见的提示,教程主要解决EEPROM报错。


官网链接:https://www.raspberrypi.com/software/

根据自己的平台下载对应Pi Imager软件
以管理员身份打开安装包,按照软件默认配置安装!

教程使用树莓派5演示。
需要准备一张空白的exFAT格式的SD卡:32G和64G均可




常见问题
若下载过程出现报错:schannel: failed to receive handshake, SSL/TLS connection failed
解决方案:进入C盘的个人用户目录修改.gitconfig文件,添加下面内容到文件底部:
[http]
sslbackend = openssl

烧录镜像成功后,将SD安装到树莓派启动,观察树莓派是否绿灯常亮或快闪。
因为我们烧录的并不是完整的系统镜像,树莓派常亮或快闪是正常的,常亮或快闪说明解决了树莓派开机指示灯短闪3次,长闪1次的情况
按照上面的步骤完成后,树莓派指示灯绿灯常亮,说明修复了SPI EEPROM error的问题。
我们需要找一张SD有树莓派官方系统的镜像给树莓派启动(重新给SD烧录官方镜像也是可以的),这样就可以正常使用树莓派。












回复:尊敬的客户您好,使用我们的出厂镜像,系统自带了OpenCV,不需要单独再去重复下载部署。