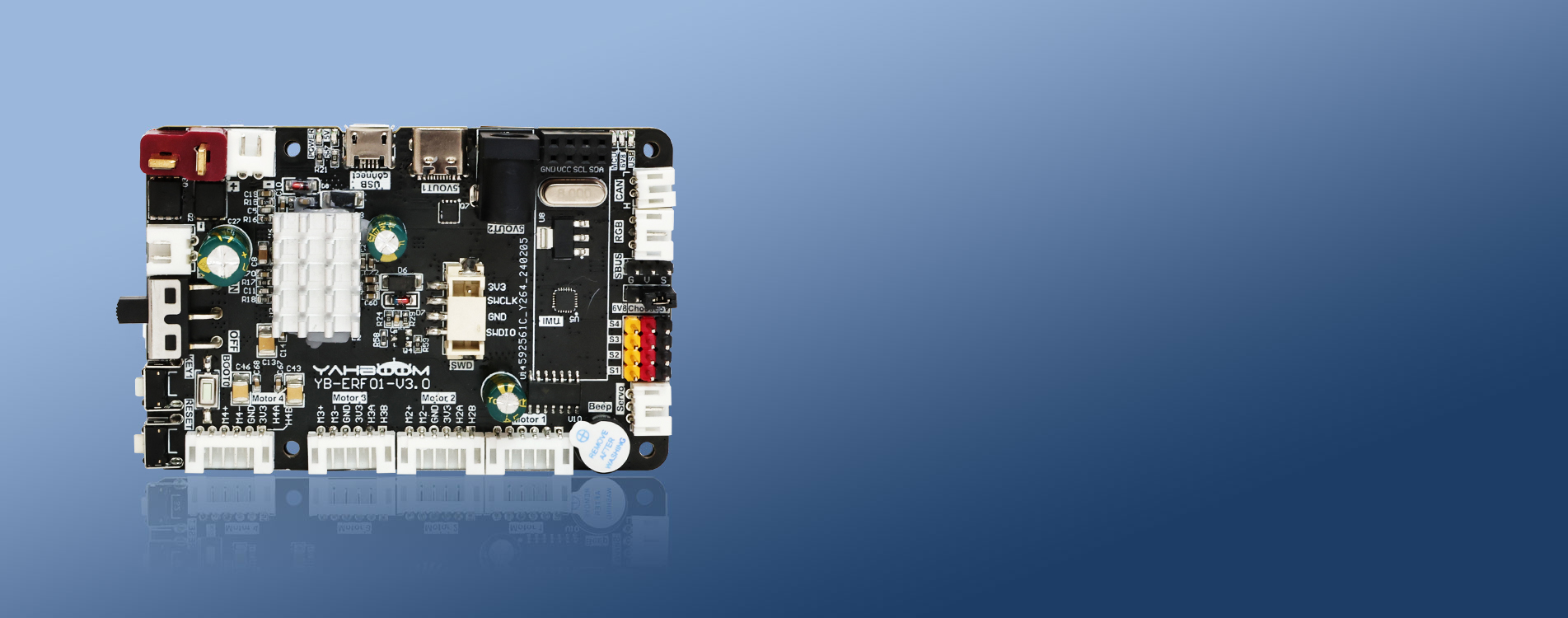
ROS机器人控制板
•既是ROS机器人驱动器,也是STM32开发板•板载IMU九轴姿态传感器,多供电接口输出
•支持树莓派5供电协议,支持JETSON等多ROS主控
•支持四路编码器电机,可驱动多种车型结构
 1、ROS2简介
2、ROS2安装Humble
3、ROS2集成开发环境搭建
4、ROS2工作空间
5、ROS2功能包
6、ROS2节点
7、ROS2话题通讯
8、ROS2服务通讯
9、ROS2动作通讯
10、ROS2自定义接口消息
11、ROS2参数服务案例
12、ROS2元功能包介绍
13、ROS2分布式通讯
14、ROS2 DDS
15、ROS2时间相关API
16、ROS2常用命令工具
17、ROS2 Rviz2使用
18、ROS2 Rqt工具箱
19、ROS2 Launch启动文件配置
20、ROS2录制回放工具
21、ROS2 URDF模型
22、ROS2 Gazebo仿真平台
23、ROS2 TF2坐标变换
1、ROS2简介
2、ROS2安装Humble
3、ROS2集成开发环境搭建
4、ROS2工作空间
5、ROS2功能包
6、ROS2节点
7、ROS2话题通讯
8、ROS2服务通讯
9、ROS2动作通讯
10、ROS2自定义接口消息
11、ROS2参数服务案例
12、ROS2元功能包介绍
13、ROS2分布式通讯
14、ROS2 DDS
15、ROS2时间相关API
16、ROS2常用命令工具
17、ROS2 Rviz2使用
18、ROS2 Rqt工具箱
19、ROS2 Launch启动文件配置
20、ROS2录制回放工具
21、ROS2 URDF模型
22、ROS2 Gazebo仿真平台
23、ROS2 TF2坐标变换











回复:您好,这是电压过低提示,若使用5V数据线连接就会出现这样的情况,请使用12V电池组供电。