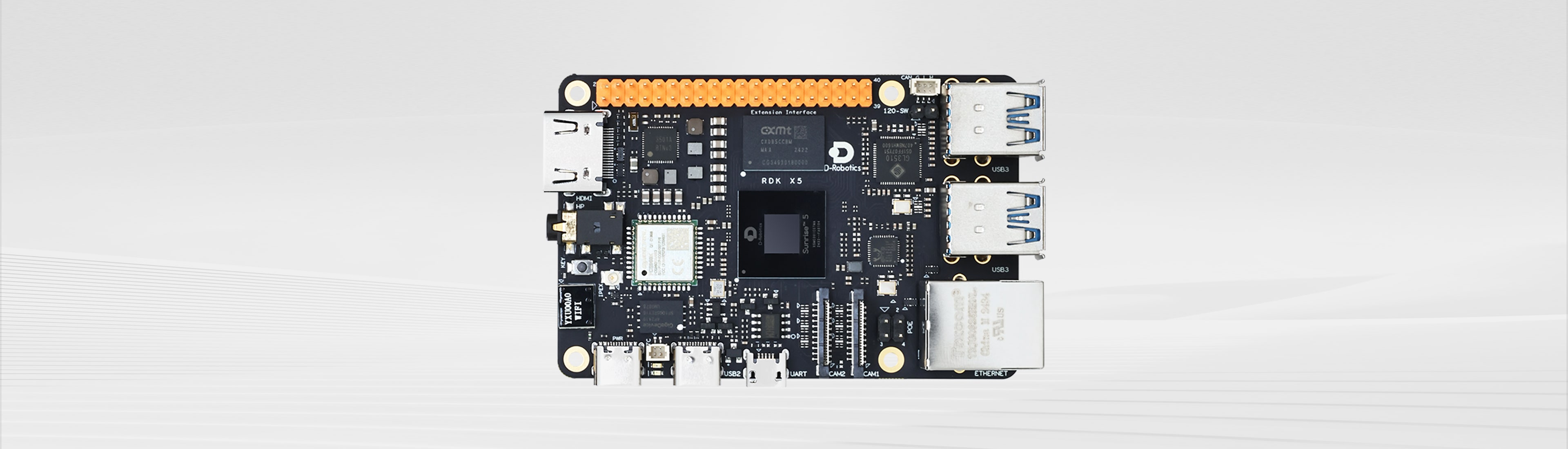
RDK X5开发板
•10T等效算力,支持ROS2操作系统•最高支持1.8Ghz主频,性能提升50%
•2.4/5G双频wifi,4/8GB内存可选
•支持大语言模型应用快速部署
 1、摄像头图像采集和显示
2、摄像头图像本地保存
3、摄像头图像采集并编码
4、视频文件解码并显示
5、RTSP拉流解码
6、VPS缩放示例
7、目标检测算法—focs
8、目标检测算法—YOLOv5s
9、使用CAN
0.AI大模型镜像说明
1.AI大模型环境部署
2.中文输入法切换
3.大模型对话平台安装
4.Meta AI:Llama3.2模型
5.阿里云:Qwen3模型
6.微软:Phi-4-mini模型
7.DeepSeek:DeepSeek-R1模型
8.阿里云:Qwen2.5vl视觉多模态大模型
9.谷歌:Gemma3视觉多模态大模型
10.Llava视觉多模态大模型
11.MiniCPM-V视觉多模态大模型
12.多模态视觉理解应用
13.多模态文生图应用
14.多模态视频分析应用
15.多模态视觉定位应用
16.多模态表格扫描应用
17.多模态自主代理应用
1. 直接使用配置好的环境(推荐)
2. OpenClaw部署
3. OpenClaw与飞书插件的应用
4. OpenClawWebChat交互
5. OpenClawTUI交互
6. OpenClaw工具介绍
7. OpenClawGate网关运行手册
8. OpenClaw插件功能介绍
9. OpenClawClawHub 介绍(skill 安装)
10.OpenClaw应用之文件管理
11.OpenClaw应用之照相机
12. OpenClaw应用之浏览器控制
13.OpenClaw应用之脚本执行
14.OpenClaw应用之Al自主编程(外设&GPIO控制)
15.OpenClaw应用之专属Al助理
16.OpenClaw接入QQBot
17.OpenClaw配置网页搜索能力
1、ROS2简介
2、ROS2安装Humble
3、ROS2集成开发环境搭建
4、ROS2工作空间
5、ROS2功能包
6、ROS2节点
7、ROS2话题通讯
8、ROS2服务通讯
9、ROS2动作通讯
10、ROS2自定义接口消息
11、ROS2参数服务案例
12、ROS2元功能包介绍
13、ROS2分布式通讯
14、ROS2 DDS
15、ROS2时间相关API
16、ROS2常用命令工具
17、ROS2 Rviz2使用
18、ROS2 Rqt工具箱
19、ROS2 Launch启动文件配置
20、ROS2录制回放工具
21、ROS2 URDF模型
22、ROS2 Gazebo仿真平台
23、ROS2 TF2坐标变换
1、摄像头图像采集和显示
2、摄像头图像本地保存
3、摄像头图像采集并编码
4、视频文件解码并显示
5、RTSP拉流解码
6、VPS缩放示例
7、目标检测算法—focs
8、目标检测算法—YOLOv5s
9、使用CAN
0.AI大模型镜像说明
1.AI大模型环境部署
2.中文输入法切换
3.大模型对话平台安装
4.Meta AI:Llama3.2模型
5.阿里云:Qwen3模型
6.微软:Phi-4-mini模型
7.DeepSeek:DeepSeek-R1模型
8.阿里云:Qwen2.5vl视觉多模态大模型
9.谷歌:Gemma3视觉多模态大模型
10.Llava视觉多模态大模型
11.MiniCPM-V视觉多模态大模型
12.多模态视觉理解应用
13.多模态文生图应用
14.多模态视频分析应用
15.多模态视觉定位应用
16.多模态表格扫描应用
17.多模态自主代理应用
1. 直接使用配置好的环境(推荐)
2. OpenClaw部署
3. OpenClaw与飞书插件的应用
4. OpenClawWebChat交互
5. OpenClawTUI交互
6. OpenClaw工具介绍
7. OpenClawGate网关运行手册
8. OpenClaw插件功能介绍
9. OpenClawClawHub 介绍(skill 安装)
10.OpenClaw应用之文件管理
11.OpenClaw应用之照相机
12. OpenClaw应用之浏览器控制
13.OpenClaw应用之脚本执行
14.OpenClaw应用之Al自主编程(外设&GPIO控制)
15.OpenClaw应用之专属Al助理
16.OpenClaw接入QQBot
17.OpenClaw配置网页搜索能力
1、ROS2简介
2、ROS2安装Humble
3、ROS2集成开发环境搭建
4、ROS2工作空间
5、ROS2功能包
6、ROS2节点
7、ROS2话题通讯
8、ROS2服务通讯
9、ROS2动作通讯
10、ROS2自定义接口消息
11、ROS2参数服务案例
12、ROS2元功能包介绍
13、ROS2分布式通讯
14、ROS2 DDS
15、ROS2时间相关API
16、ROS2常用命令工具
17、ROS2 Rviz2使用
18、ROS2 Rqt工具箱
19、ROS2 Launch启动文件配置
20、ROS2录制回放工具
21、ROS2 URDF模型
22、ROS2 Gazebo仿真平台
23、ROS2 TF2坐标变换