ROSMASTER M3
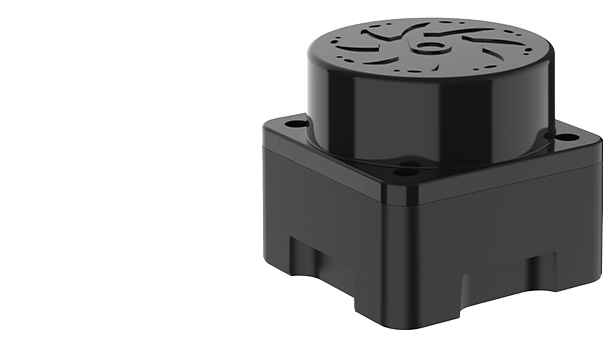
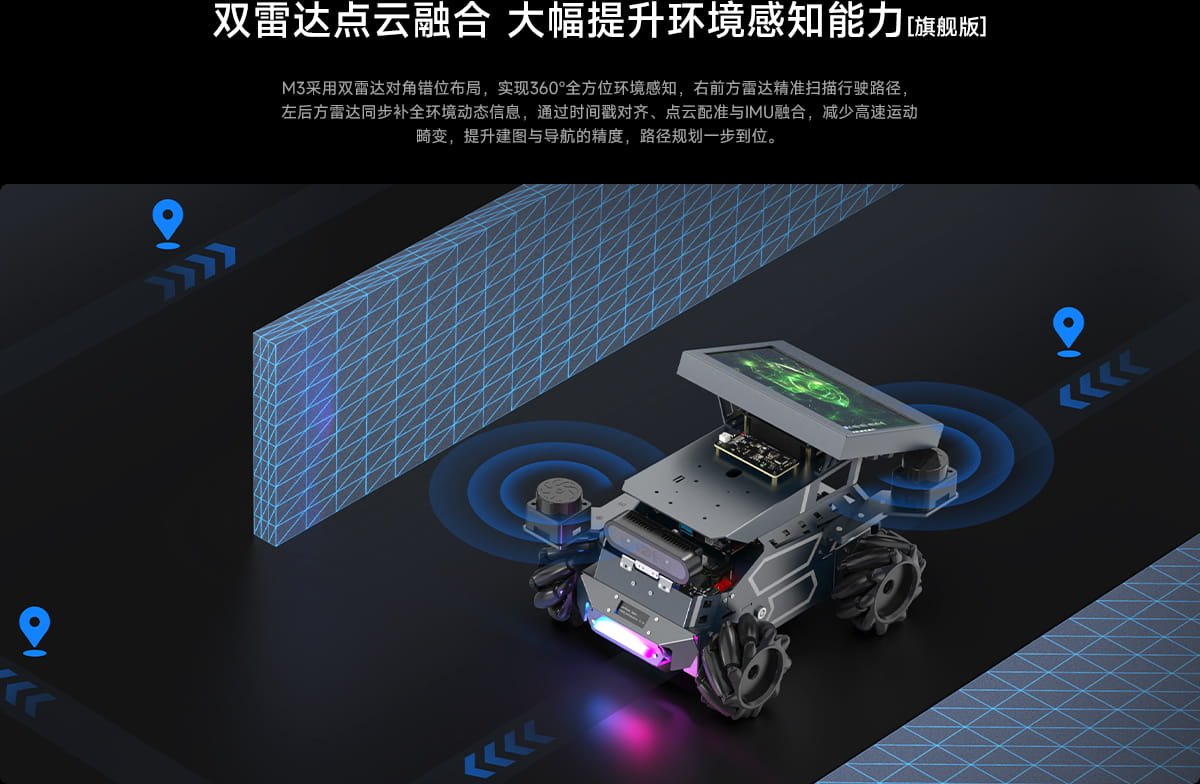
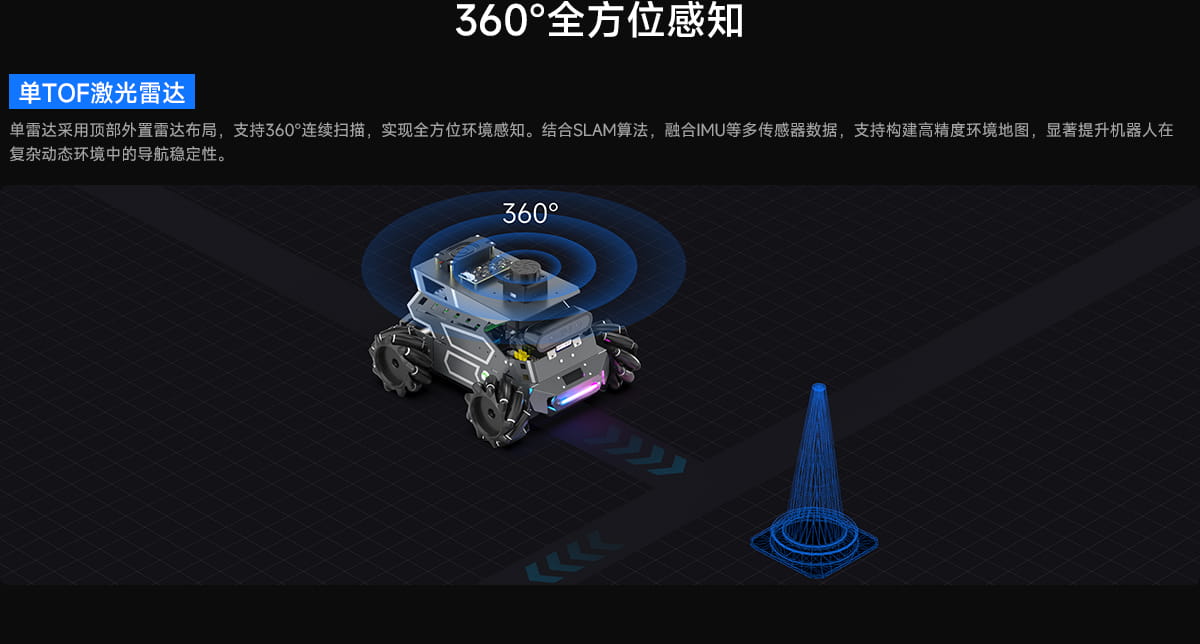
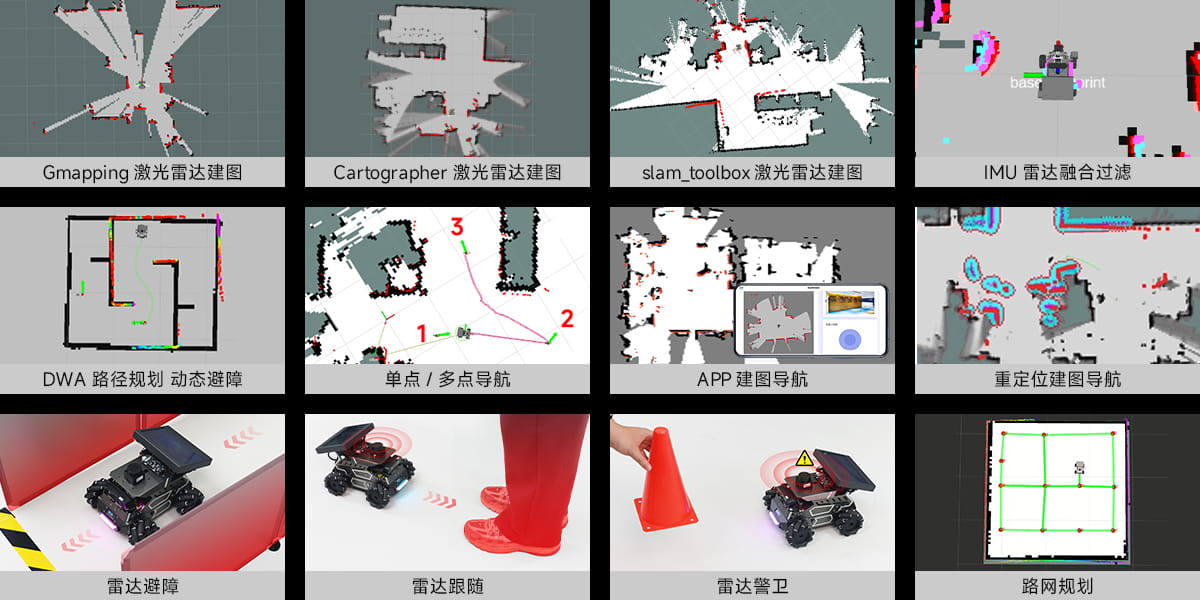
T-mini Plus激光雷达采用TOF测距原理,测距范围为0.05m至12m,采样频率高达4000次/秒。支持选配单/双雷达,双雷达版本采用对角错位布局,配合多雷达数据融合过滤算法,有效提升机器人在复杂环境中的建图与导航精度及运行效率。
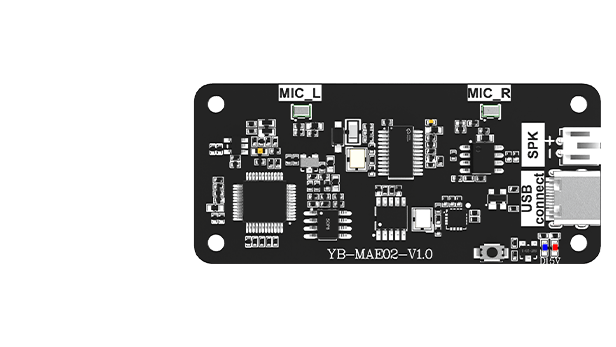
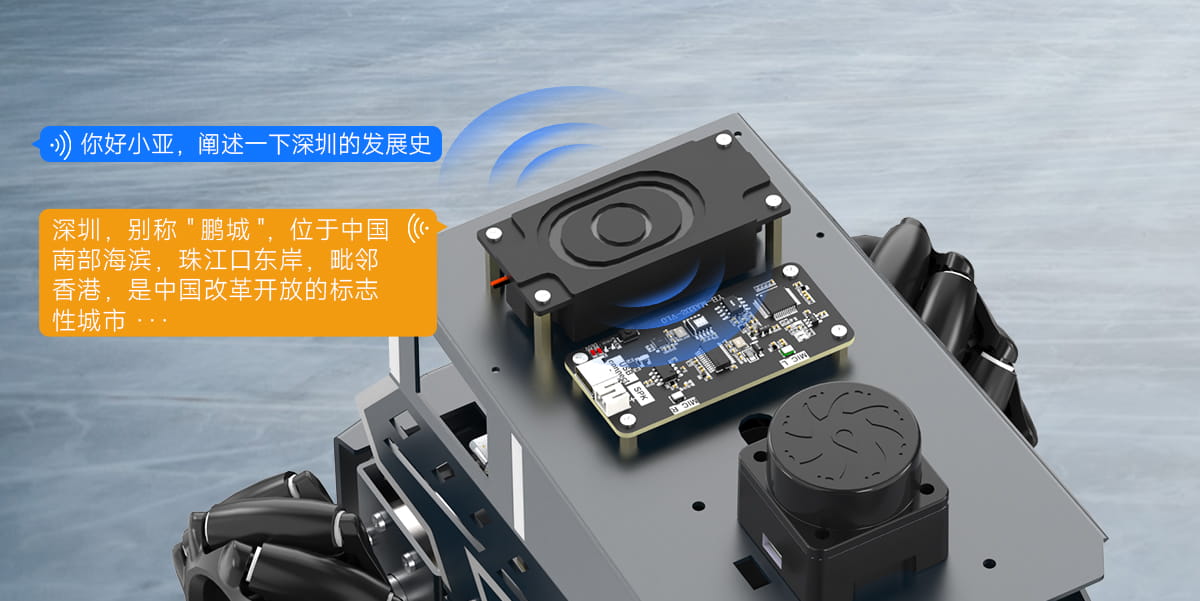
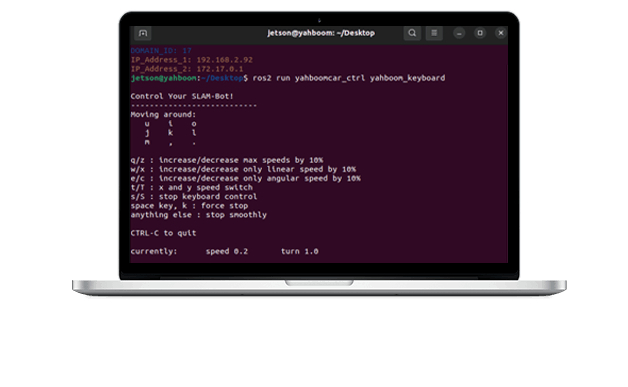
Al语音大模型模块是连接用户语音输入与智能模型决策的核心枢纽,模块配置了高灵敏MEMS麦克风搭配腔体扬声器,能够对语音进行清晰的拾取,具有远场拾音、回声消除、语音播报、环境降噪等功能。
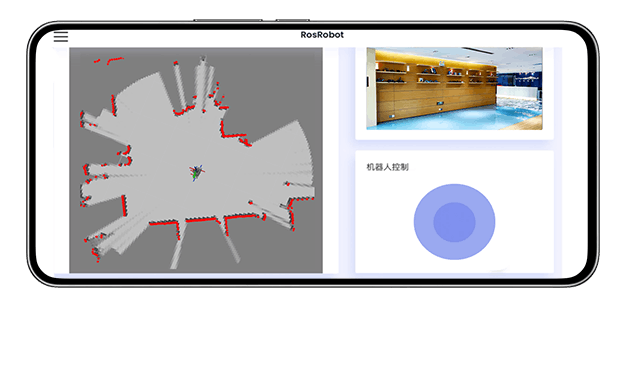
可选配高清触摸7寸屏,支持随时随地调试机器人,通过触摸屏可以直观地查。看和设置参数以及监控运行状态,像操作电脑一样方便。
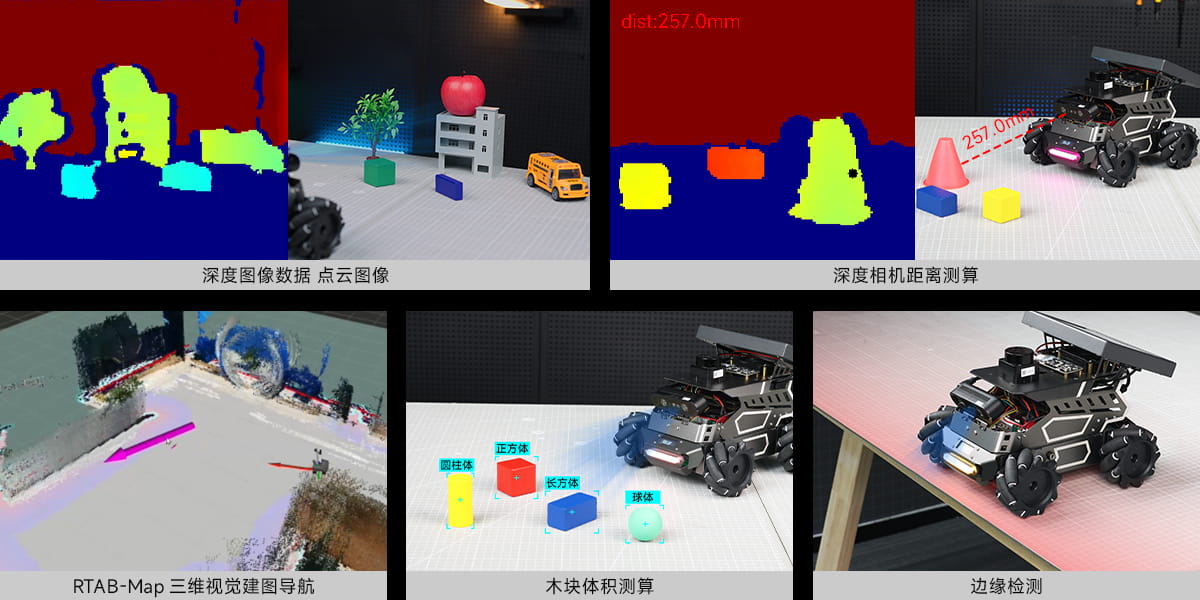
支持选配Nuwa-HP60C或奥比中光DABAI DCW2深度相机,支持俯仰角调节,兼容高清摄像头AI视觉功能,同时可实现3D深度数据处理、三维建图与导航等进阶应用。
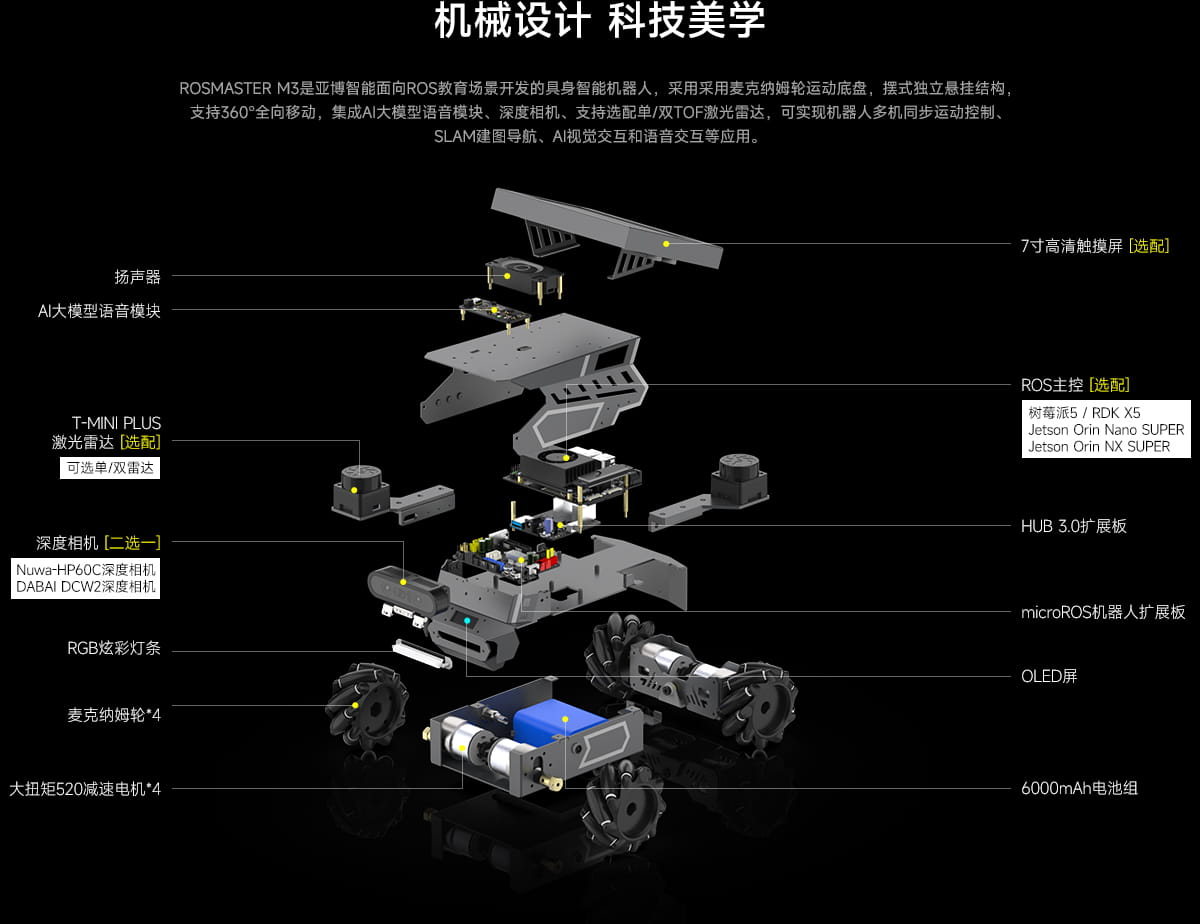
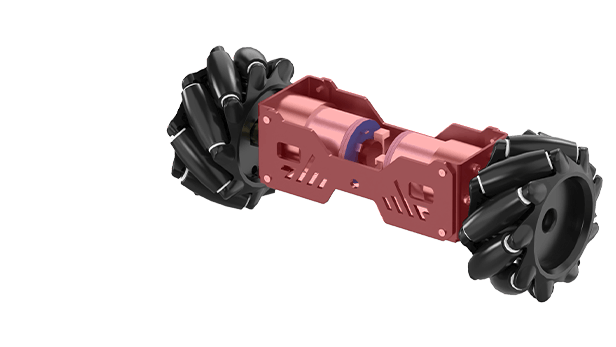
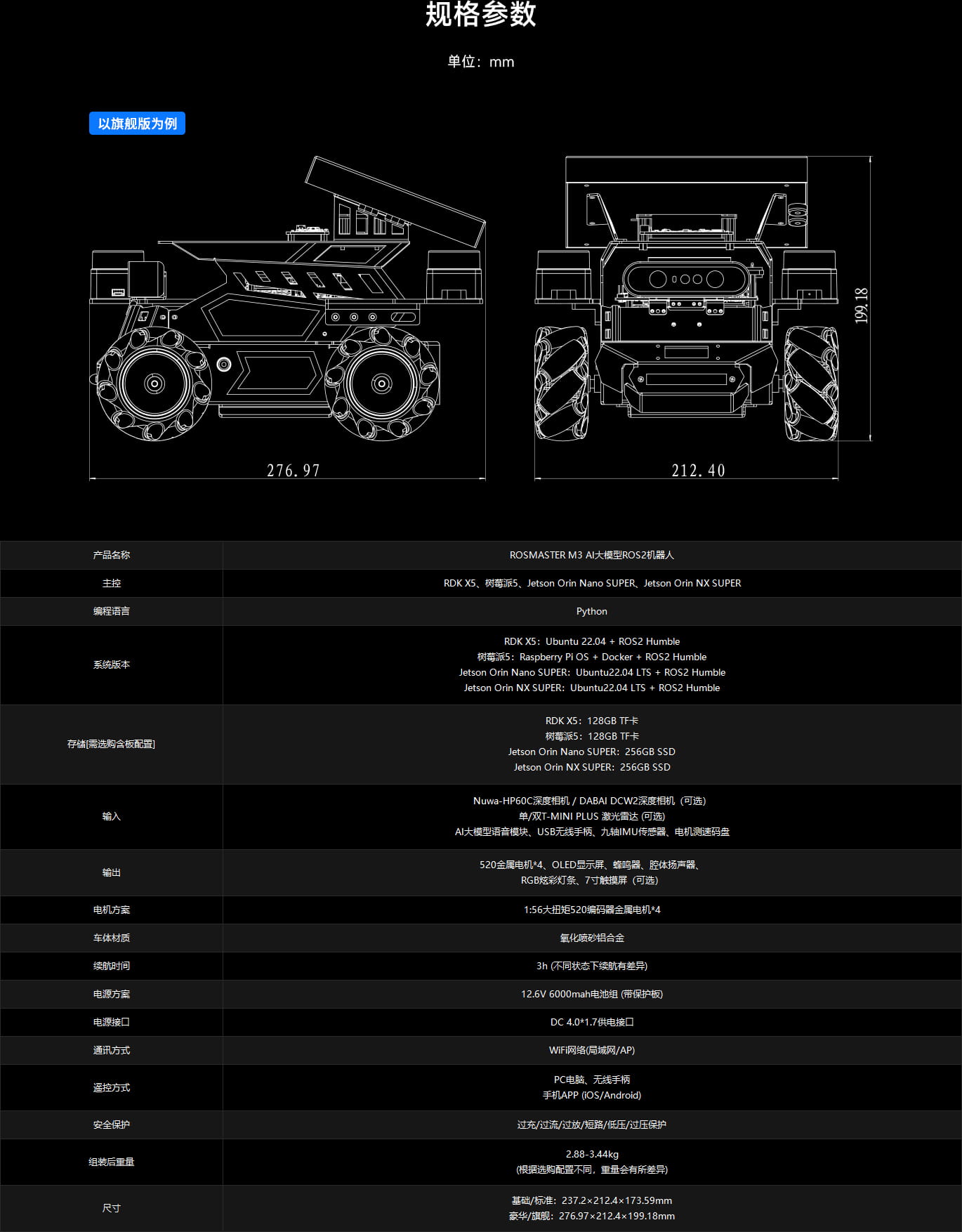
ROSMASTER M3搭载专业级麦克纳姆轮与后轮摆式悬挂结构,支持全向移动的同时,可在不平整地面保持四轮同时触地,避免车轮打滑影响电机编码器识别,降低里程计误差。
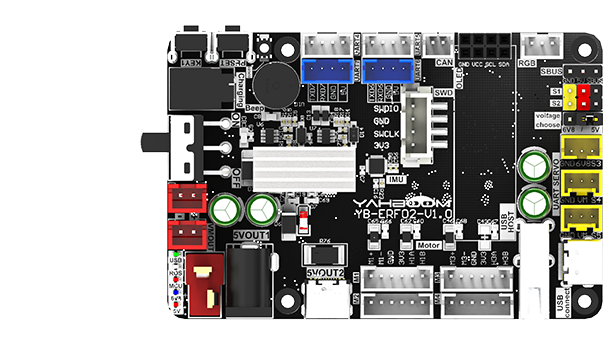
microROS机器人控制板搭载高性能STM32主控芯片与9轴IMU传感器,采用microROS方案驱动两个T-mini Plus雷达,减少ROS主控端口资源占用。支持4路编码器电机驱动,满足多主控供电需求,实现高效、稳定的智能控制系统。
配备12.6V 6000mAh锂电池组,具有过冲、过放、短路、过流、低压、过压保护功能电芯安全可靠,电池容量大,续航持久。
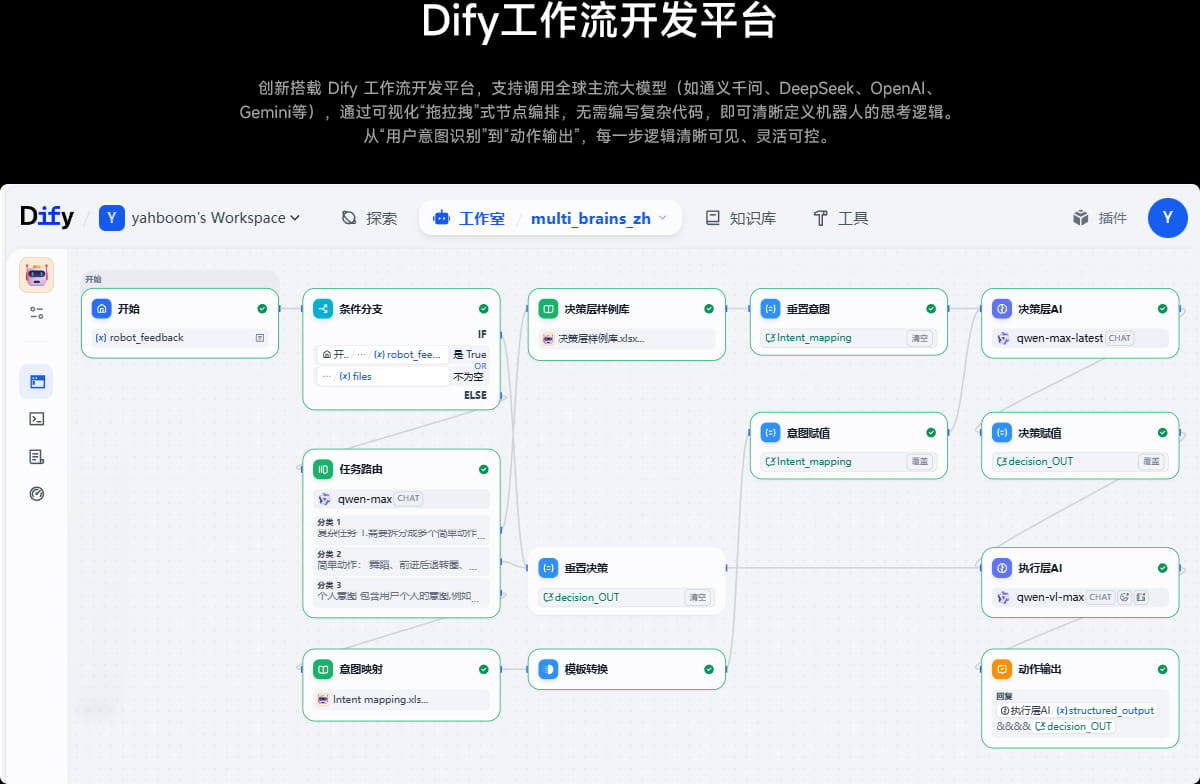
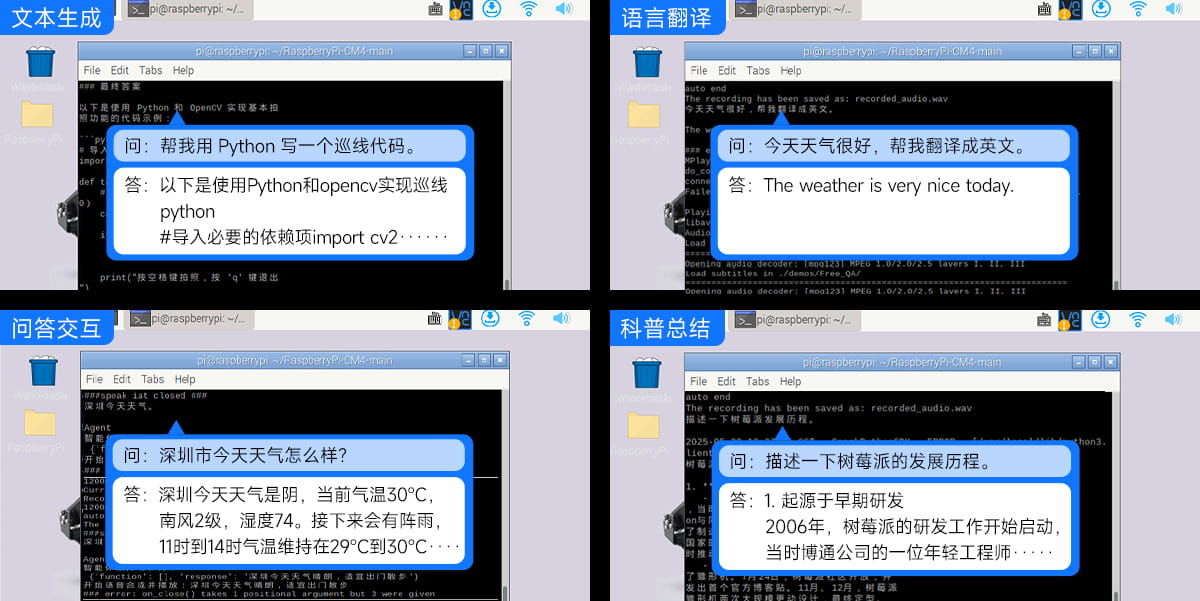
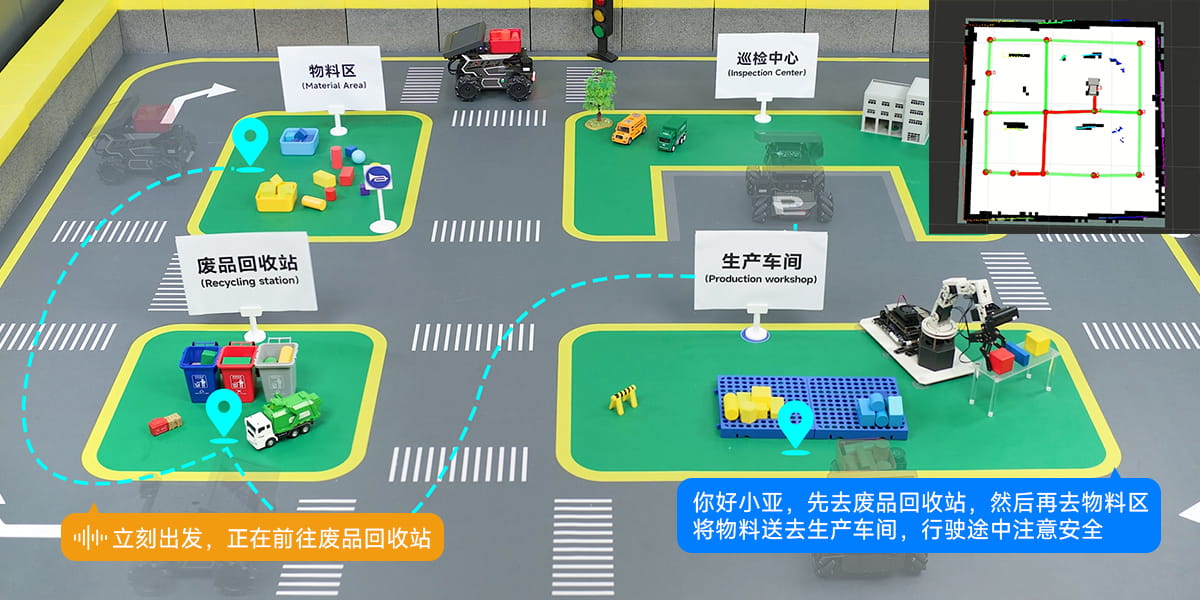
M3实时接入通义千问大模型平台,宛如配备“超级大脑”,不仅能理解文本指令,还能灵活应答。
M3搭载AI大模型语音模块和扬声器,支持语音与文字实时互转,接入通义千问后,能“听“会“说”,实现智能交互体验。
M3搭载深度相机,能够理解和分析图像内容,精准识别物体,并输出文本和语音反馈。
通过视觉大模型,M3能理解视野内的场景信息,识别物体名称与空间关系并通过语音大模型实时答复。
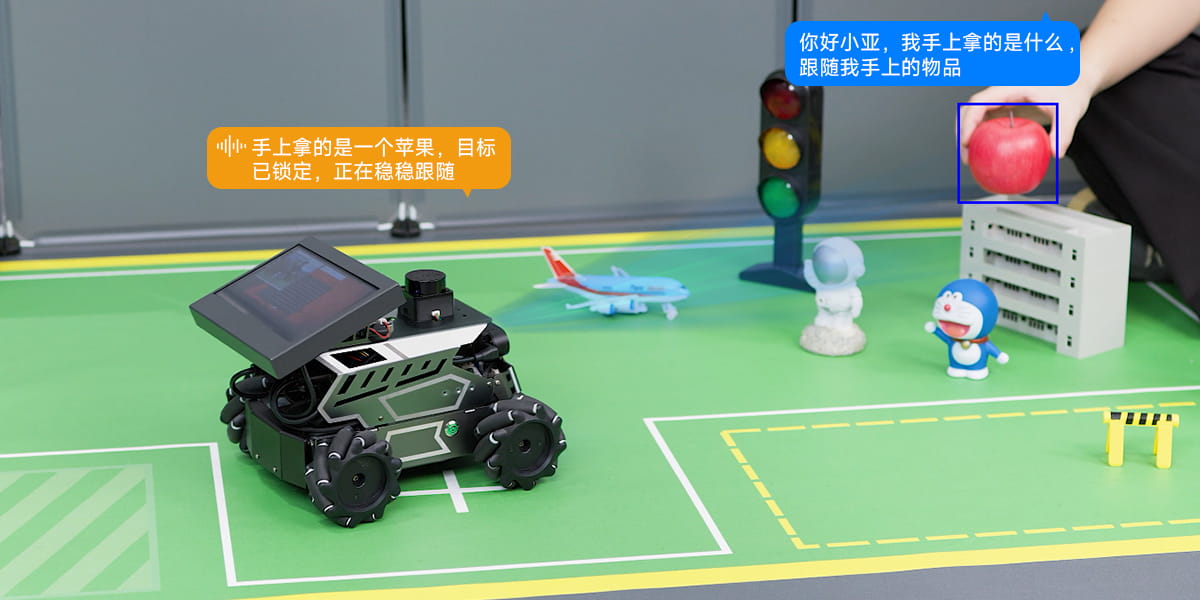
借助视觉大模型的强大分析能力,M3能够在复杂环境中自动识别并锁定目标物品,实现具备空间距离感知的立体化跟随。
通过大模型与深度相机的协同工作,M3具备环境理解与距离感知能力,能够结合视觉识别内容与距离数据进行智能问答。
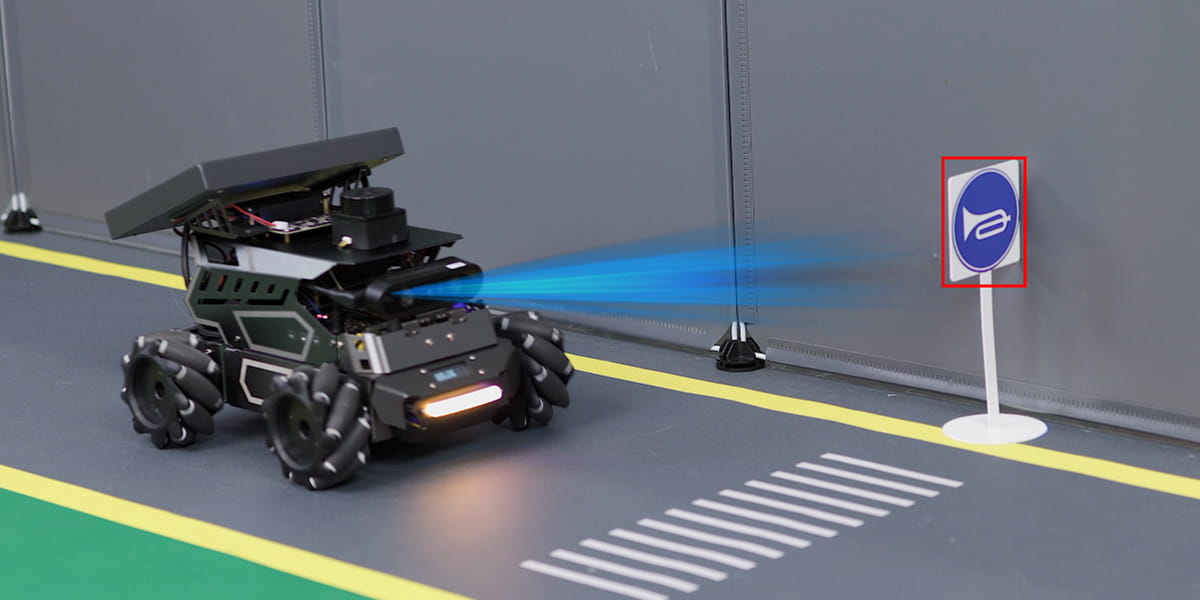
借助视觉大模型的强大分析能力,M3能够在自动驾驶沙盘地图中识别路标,并根据路标指示执行对应动作。
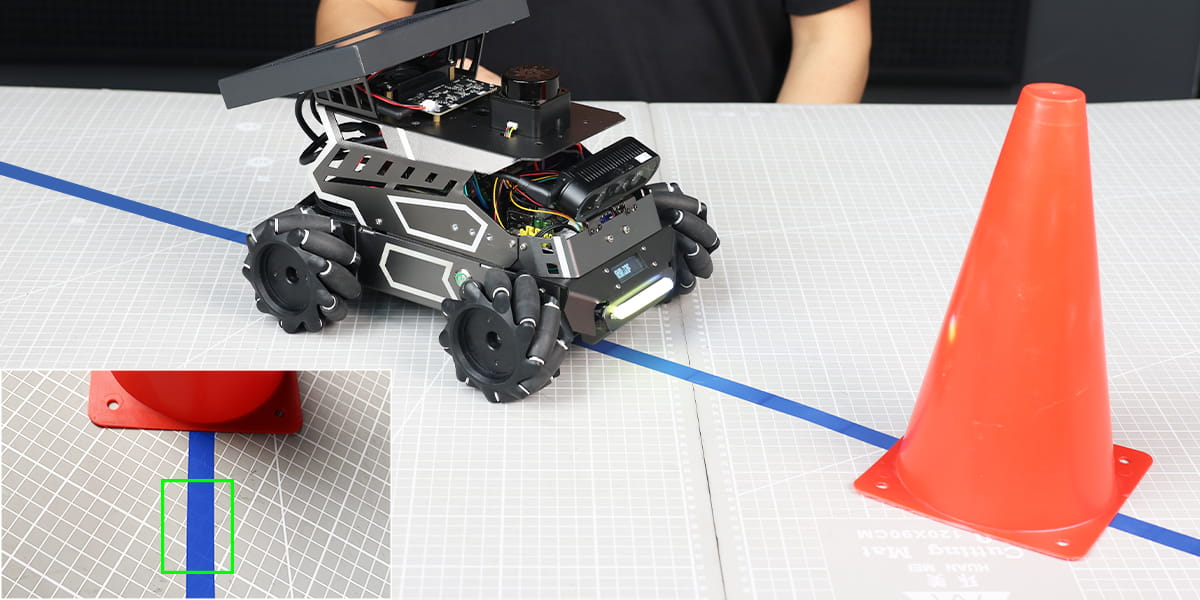
通过视觉大模型的深度分析,M3能够精准识别并实时追踪不同颜色的线条,实现自主巡航。
通过视觉大模型分析,M3能够深入理解地图不同区域内的物品、空间布局。
M3可以实时回传环境数据至视觉大模型进行深度分析,并根据用户不同的语音指令自适应动态路径规划,自主导航至单个或多个指定区域,从而实现智能多点导航。
通过语言大模型推理和视觉大模型分析,M3能够精准识别并分析用户的语音指令,深层次理解指令含义并自主规划完成对应搜索任务。
将沙盘地图与SLAM导航结合,支持在地图中进行多点导航、物体搜索等大模型应用,可自行设置地图场景与二次开发,全面支持Al大模型教学与实践。
通过融合视觉理解、语义分析与SLAM动态路径规划,M3能够拆解用户下达的复杂指令,实时感知环境变化,并完成识别、追踪、导航、问答等一系列连贯操作。
通过扩展RAG知识库实现用户意图识别与环境情境分析,无需发布详细的指令,机器人即可自行理解用户的潜在需求,自主进行任务规划与动态响应。
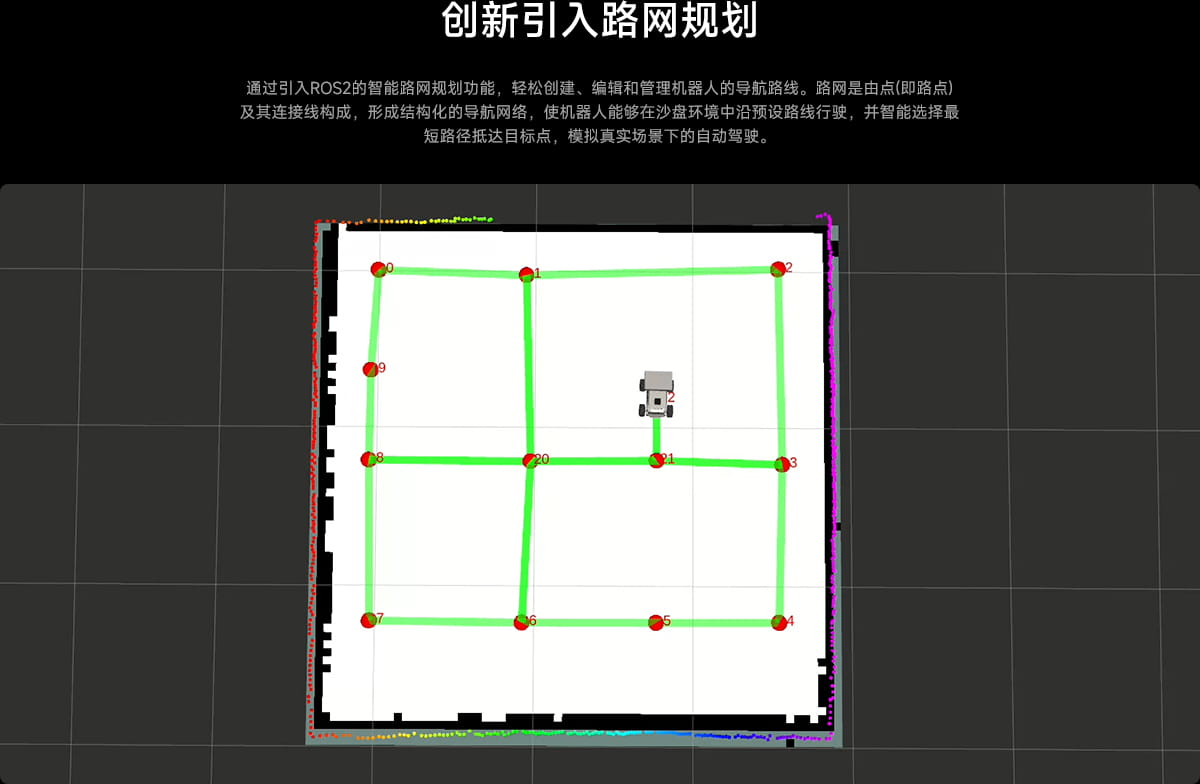
通过融合多模态大模型、视觉自动驾驶模型与ROS2路网规划系统,M3能在沙盘地图环境中实现高度智能化的自动驾驶。不仅能理解用户下达的语音指令,结合路网拓扑结构自主规划最优路径,还能在行驶过程中实时识别沙盘中的路标信息,理解交通规则,精准抵达目标,高效完成指定任务。
配备高精度TOF激光雷达,支持双雷达融合过滤[旗舰版],能实现高精度的建图导航。支持多种建图算法和终身建图,具备单点/多点导航功能,可通过APP进行建图导航操作。特别优化重定位导航技术,显著降低运行中的定位漂移,提升导航稳定性与可靠性。
3D结构光深度相机可生成深度图像和点云数据,精准获取目标物体的深度信息,实现距离及体积的精确测算。结合雷达数据,可构建高精度三维彩色地图,支持更精准的环境感知与智能导航。
内置YOLOv11深度学习模型,支持图像分割、姿态估计、图像分类与定向物体检测等案例,赋予机器人更强大的环境感知与决策能力。配套提供完整的模型训练与部署教程,助力开发者快速定制专属视觉应用。
集成多种主流图像处理算法,支持OpenCV、MediaPipe等框架,可高效识别多种目标物体,助力开发者快速构建高性能计算机视觉应用。
将视觉算法与小车运动控制相结合,通过调整车身姿态实时锁定目标,结合深度信息,实现保持距离的3D立体化跟随。
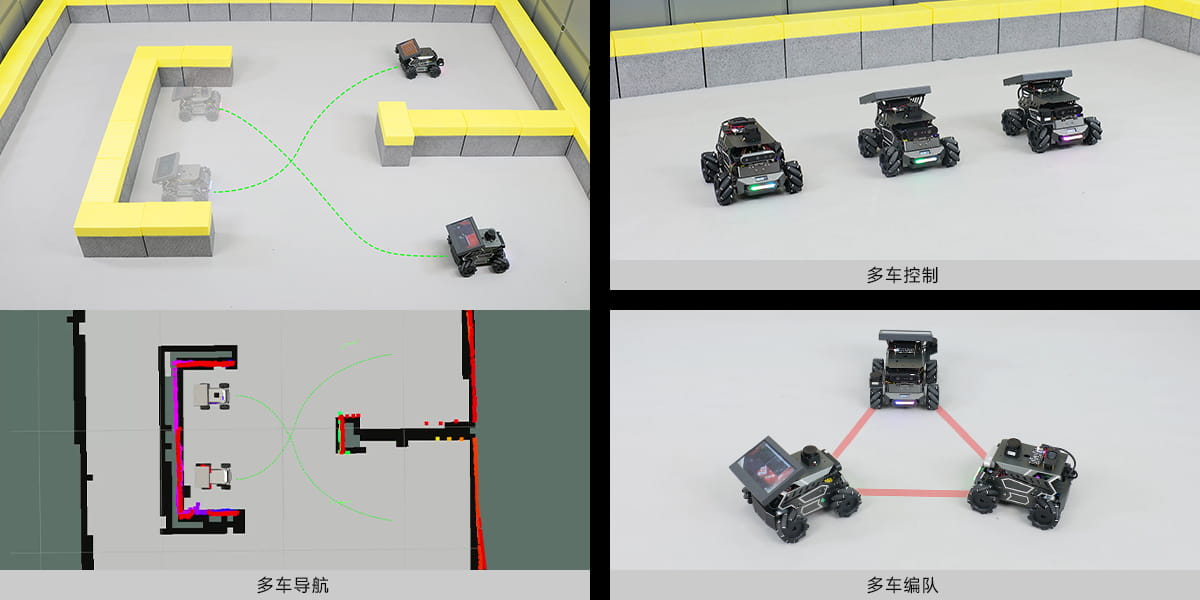
支持多台机器人同地图多点导航巡航与动态避障,可通过一台主机同步控制多台机器人,实现多机同步控制及队列表演。
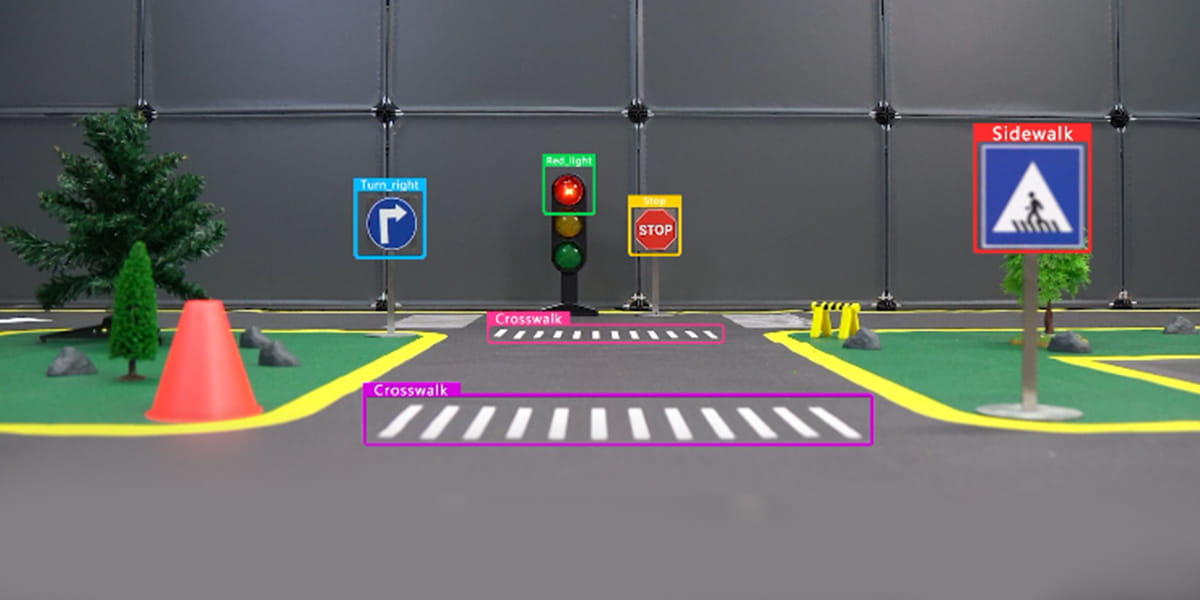
通过训练深度学习的模型库,从而实现自动驾驶的功能。
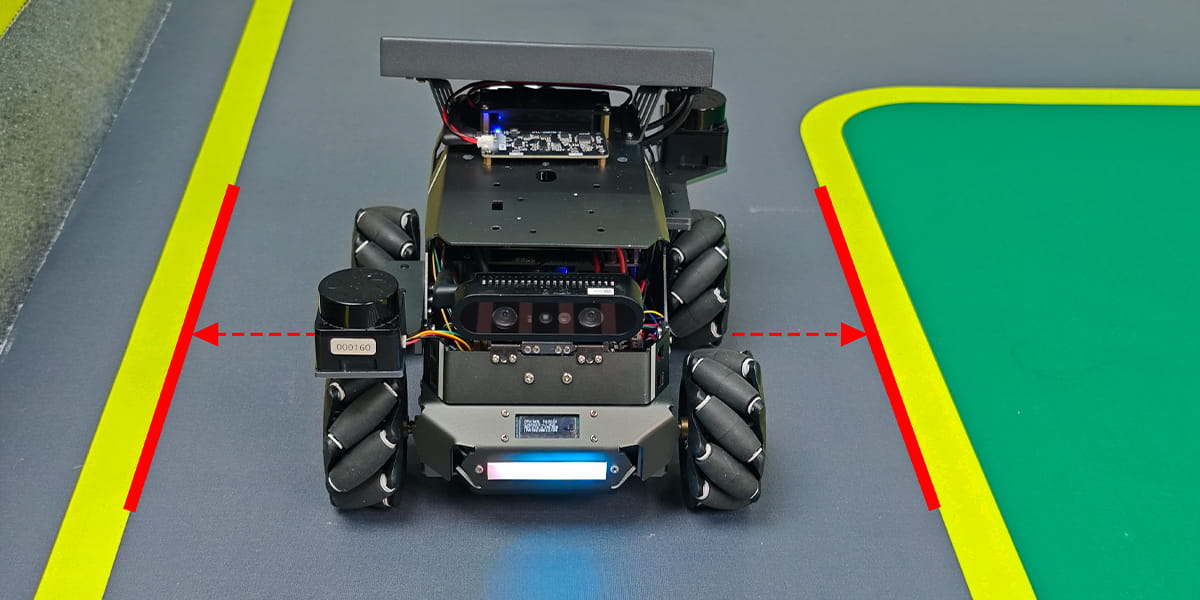
通过对两侧车道的识别,车辆在行驶中和车道保持安全距离。
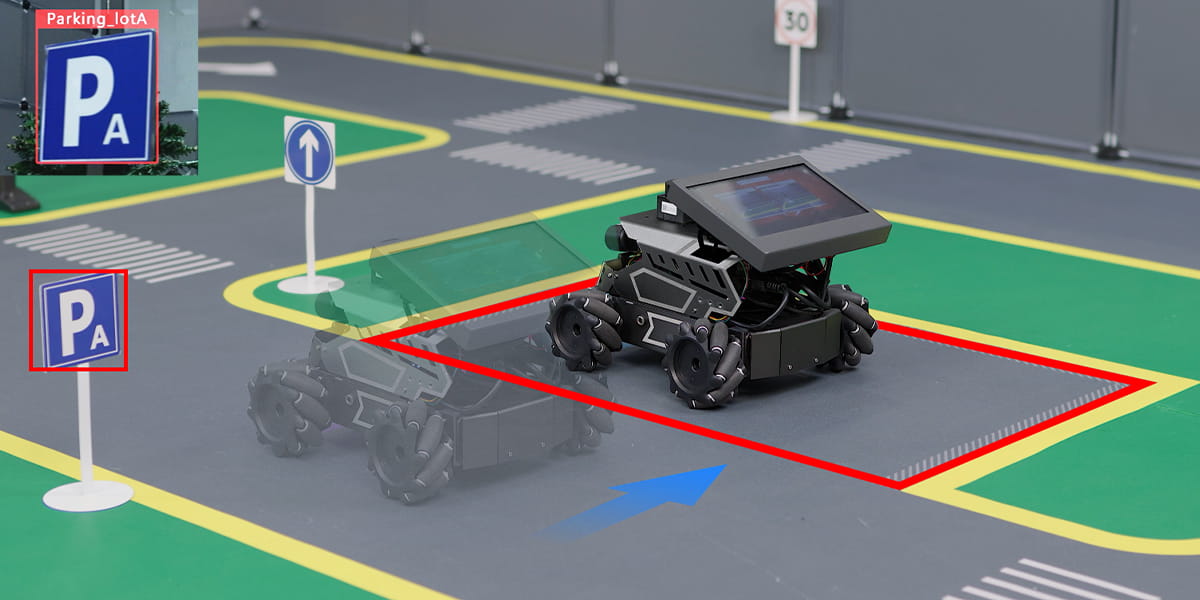
当机器人识别到泊车路标时,可以实现全自动停车入库。
根据车道、交通标识和红绿灯,对路况进行综合决策。
支持安卓/IOS手机APP控制
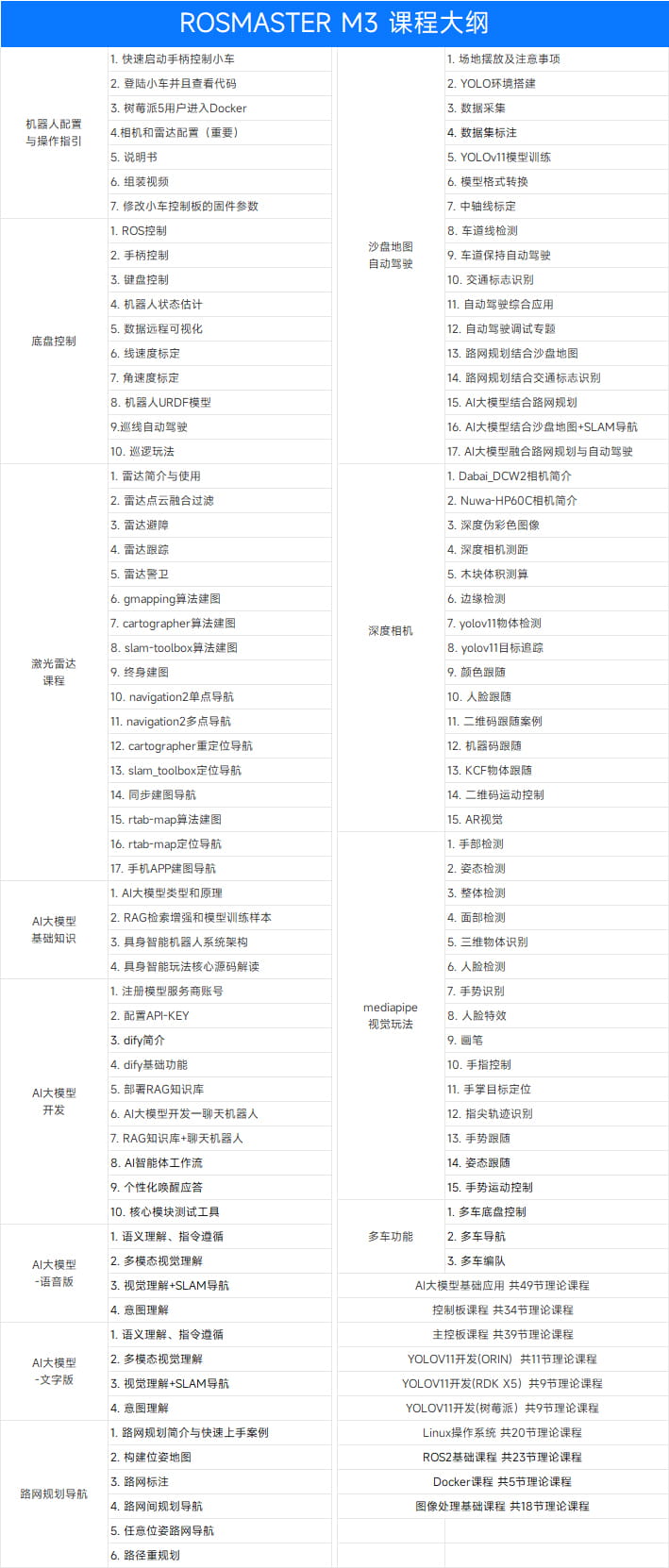
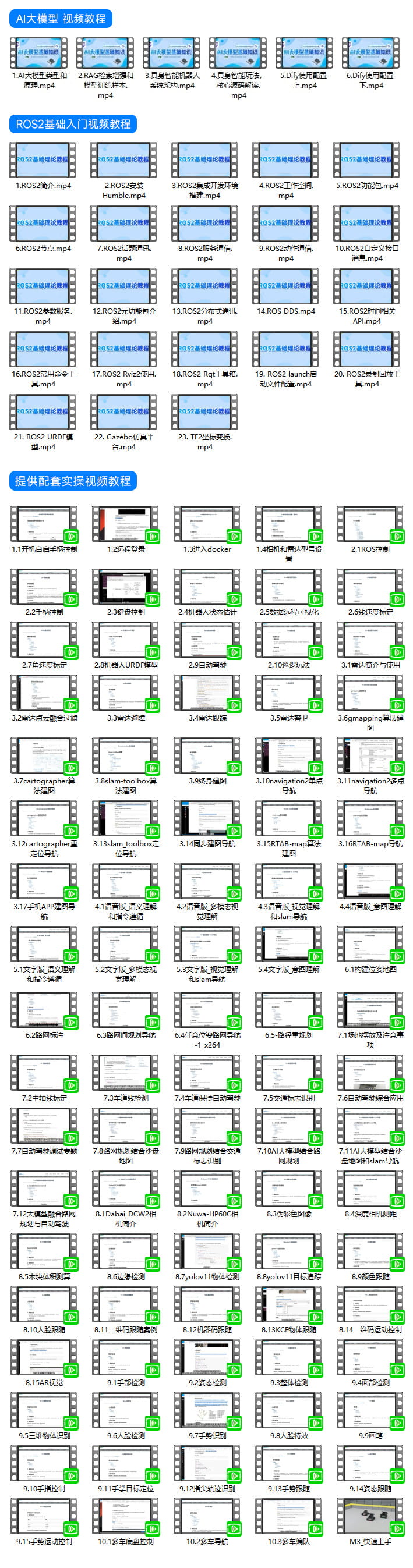
亚博智能配备精心研发的配套课程资料,提供基础理论知识与实操案例教程,内容由浅入深,方便用户快速上手学习。
原创中英文视频教程,资深工程师手把手带您玩转ROSMASTER M3。
程序代码开源,让技术更自由,让创新更简单。