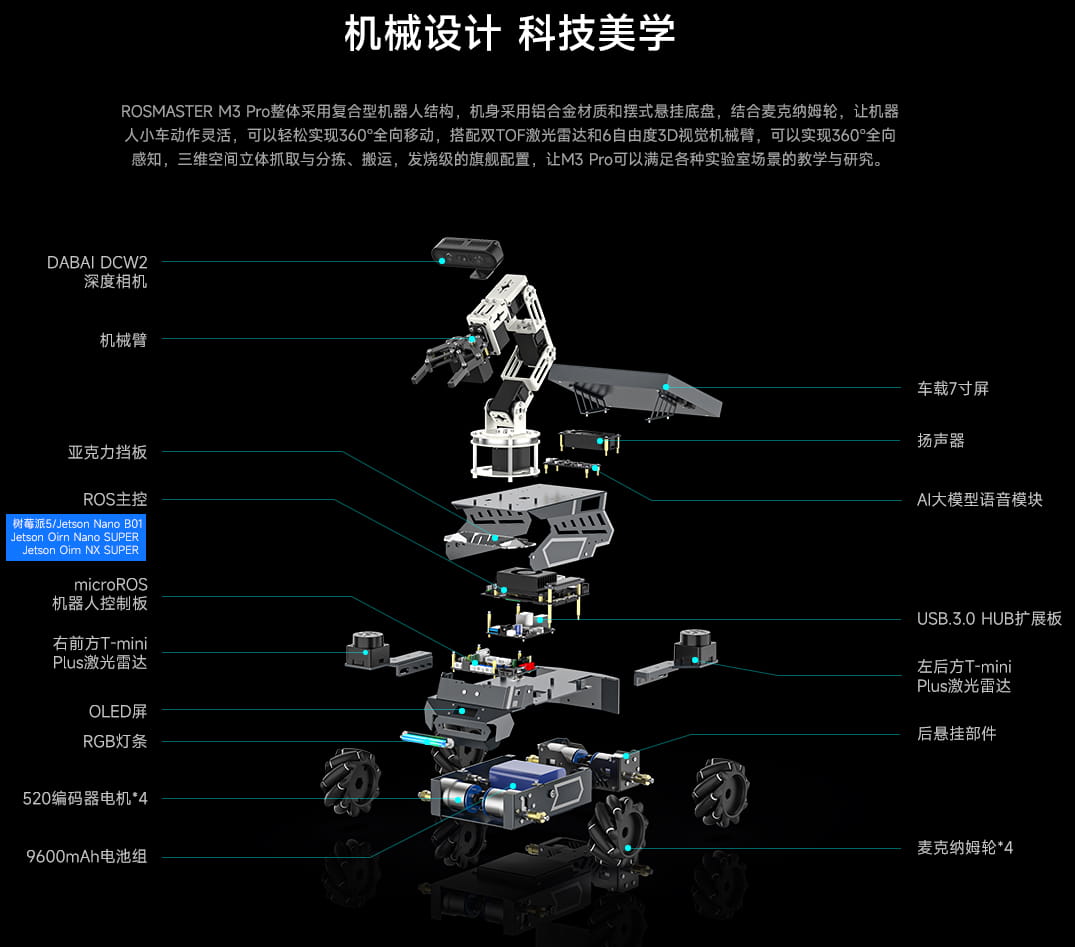
ROSMASTER M3 PRO
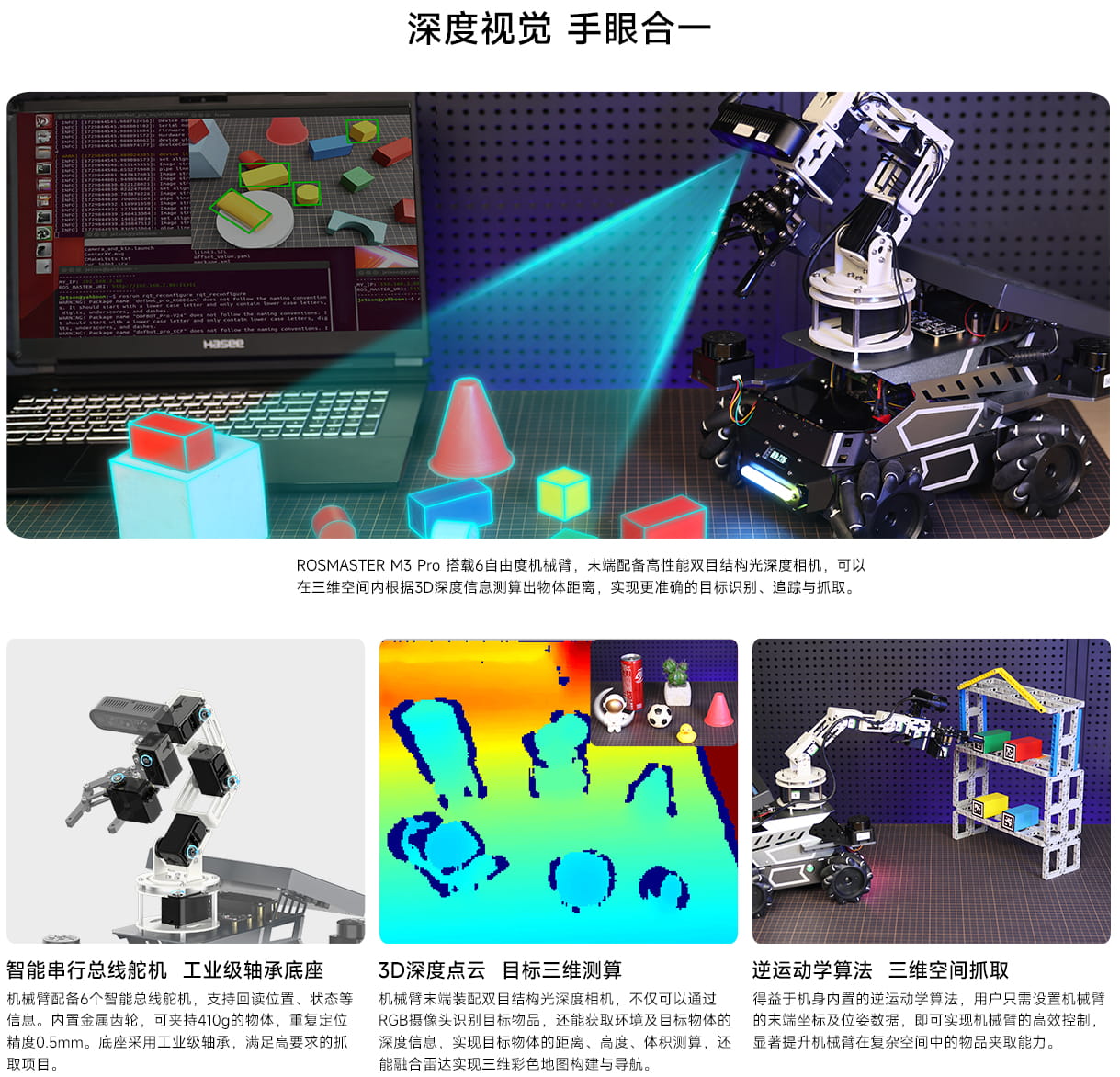
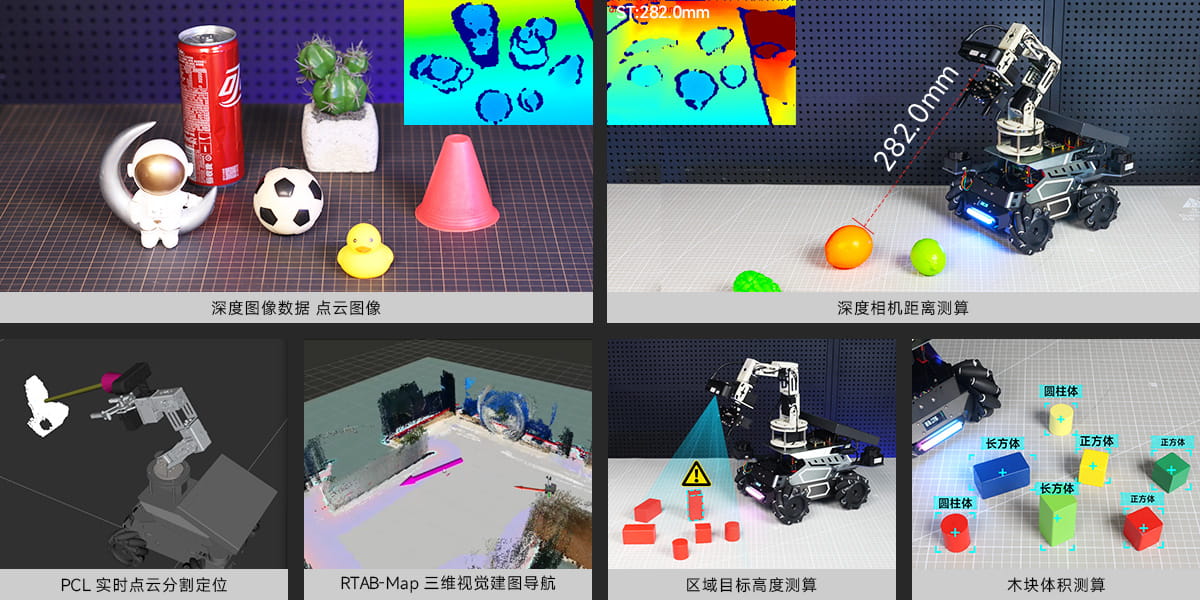
搭载奥比中光DABAI DCW2双目结构光深度相机,深度测量可达5m,有用较高的测量精度,能够精准测算出物体距离、形状、高度、体积等信息,从而实现三维空间中的抓取、分拣、搬运等高阶AI项目。
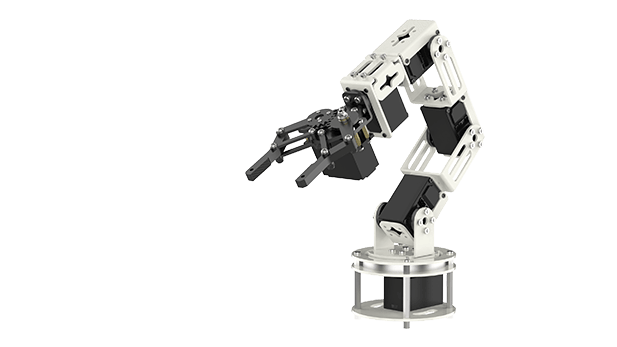
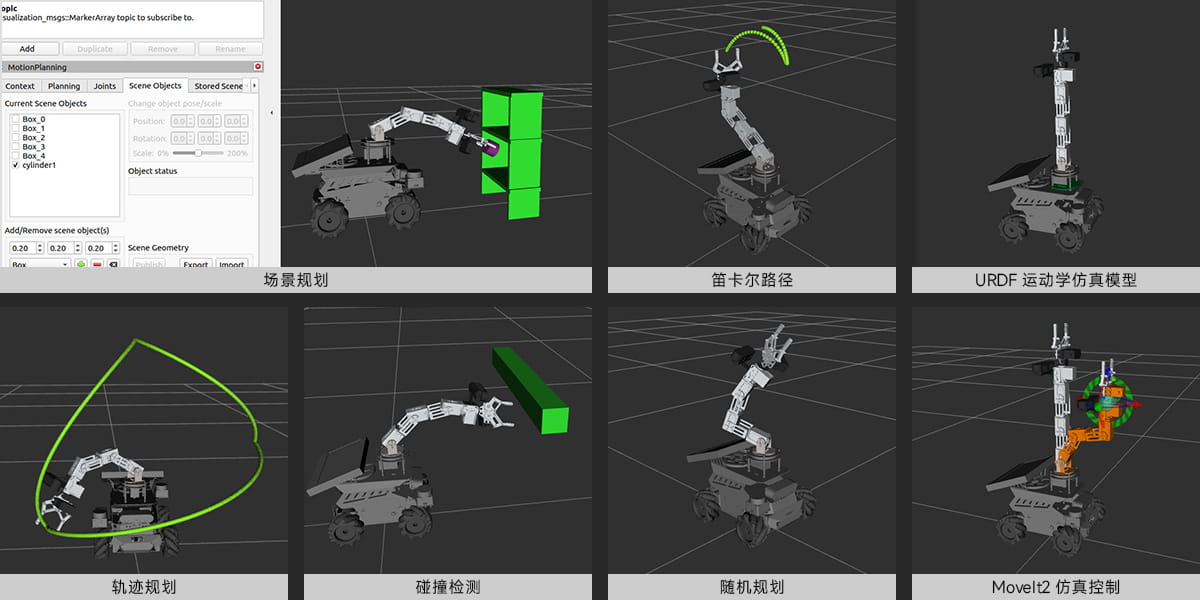
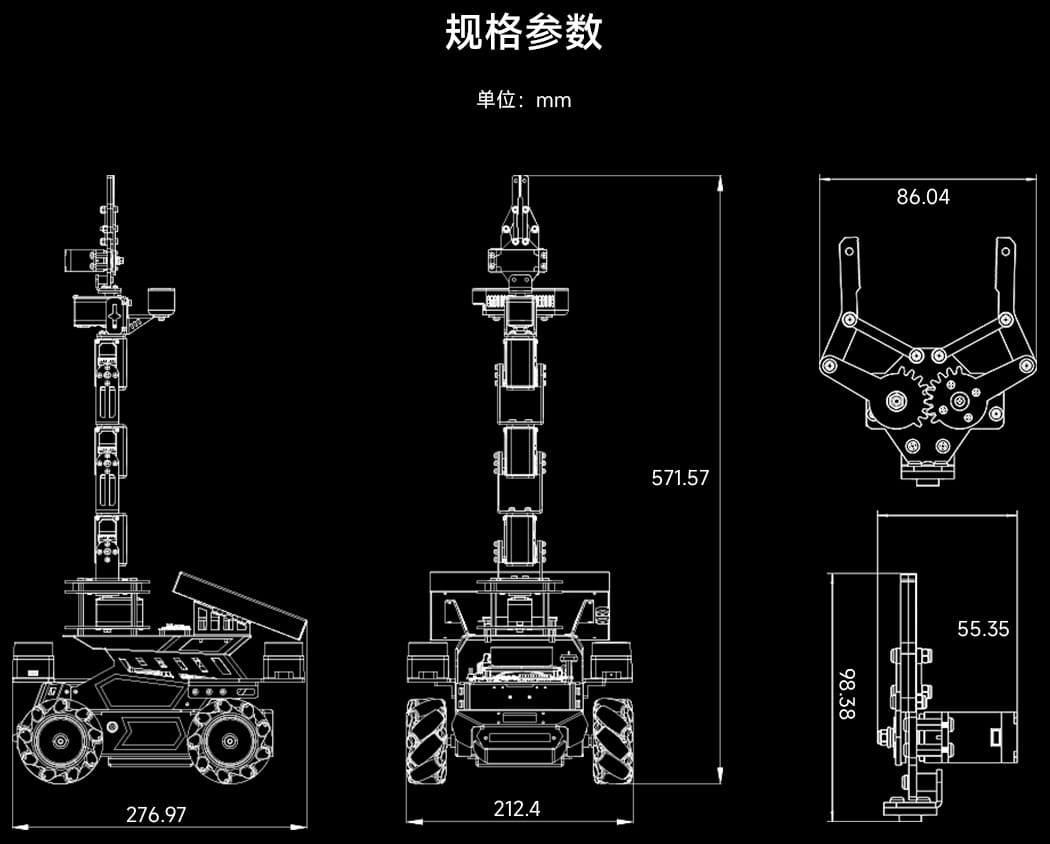
机械臂由6个串行总线舵机组成,整体重复定位精度为±0.5mm,可在机械臂中心轴为30cm半径的圆内进行物体抓取,支持搬运不超过410g的物体,提供MoveIt2 仿真课程,结合语音交互可完成语音控制搬运、垃圾分拣等多种玩法。
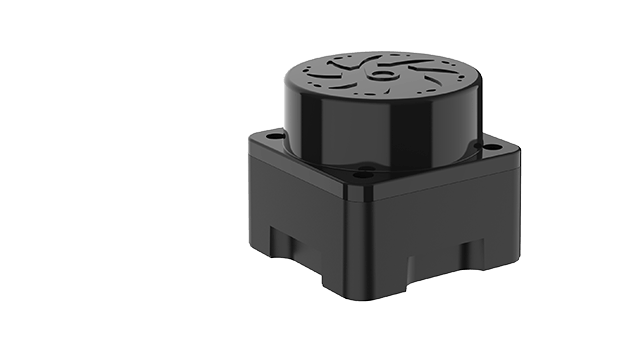
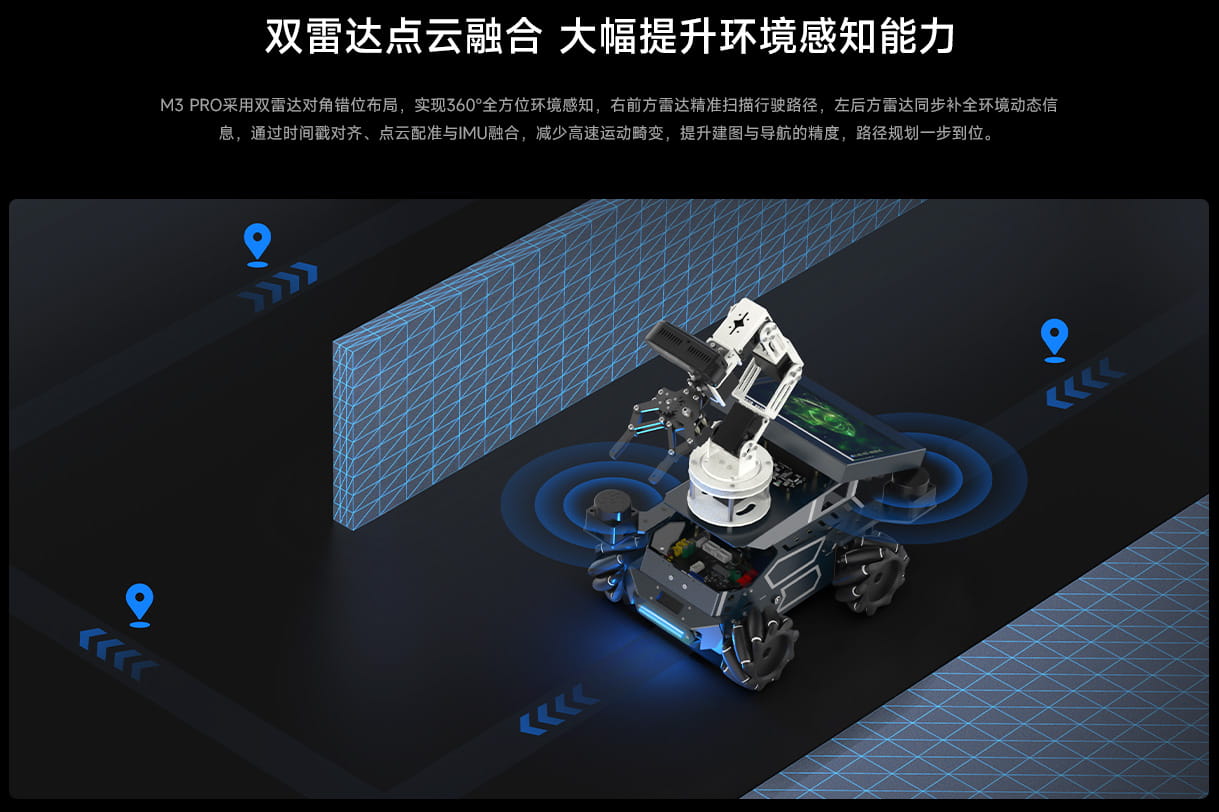
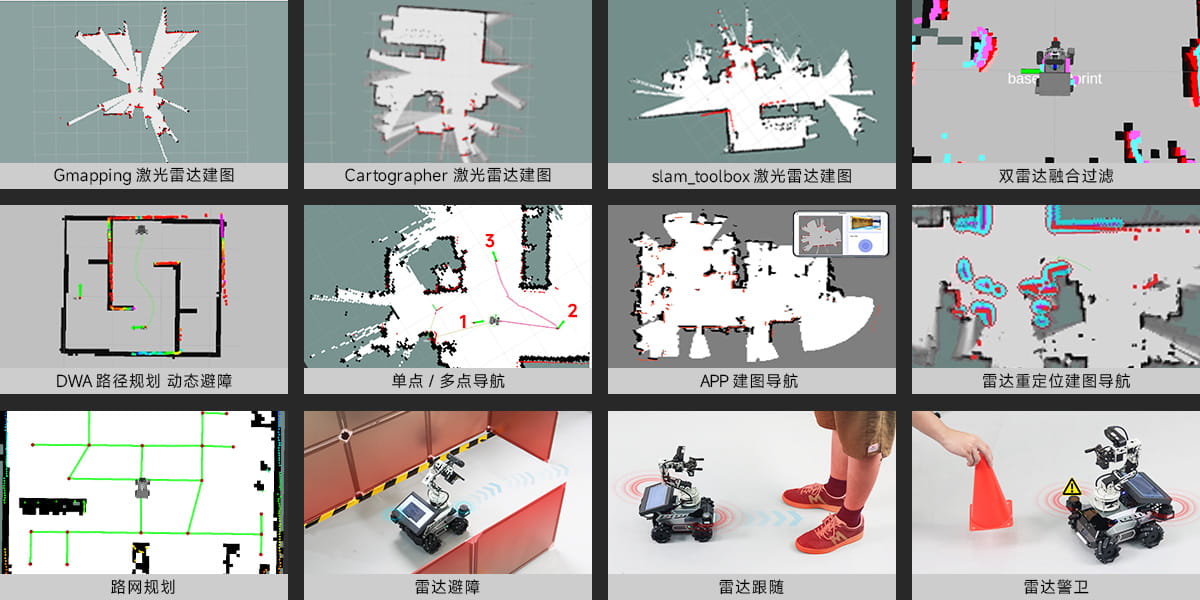
T-mini Plus激光雷达采用TOF测距原理,测距范围为0.05m至12m,采样频率高达4000次/秒,配合双雷达数据融合过滤、对角错位布局,有效提升机器人在复杂环境中的建图与导航精度及运行效率。
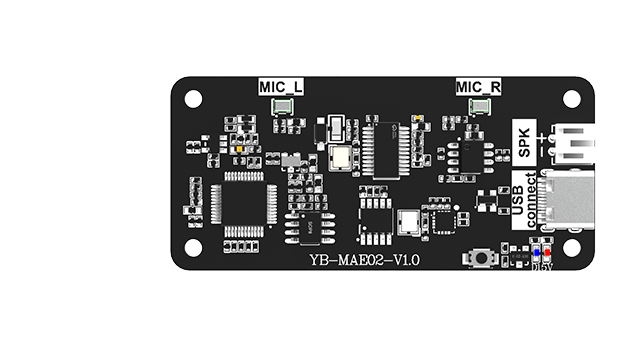
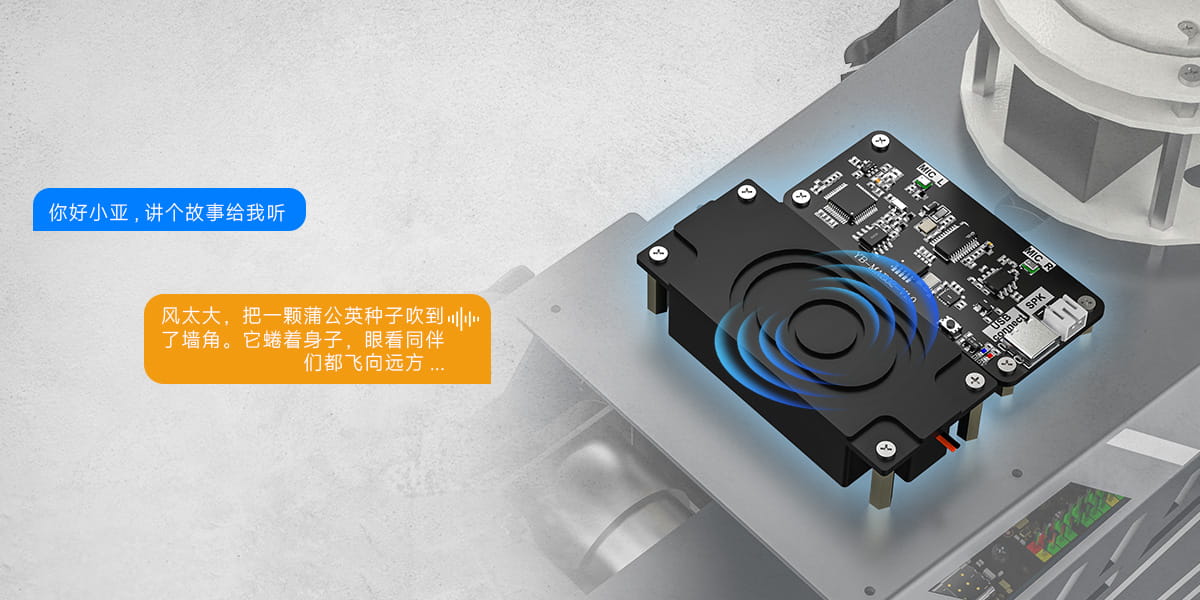
AI语音大模型模块是连接用户语音输入与智能模型决策的核心枢纽,模块配置了高灵敏MEMS麦克风搭配腔体扬声器,能够对语音进行清晰的拾取,具有远场拾音、回声消除、语音播报、环境降噪等功能。
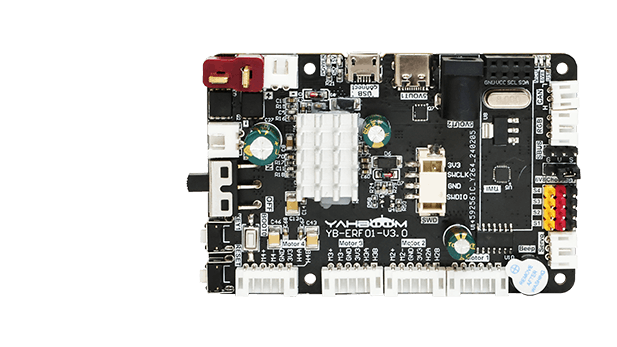
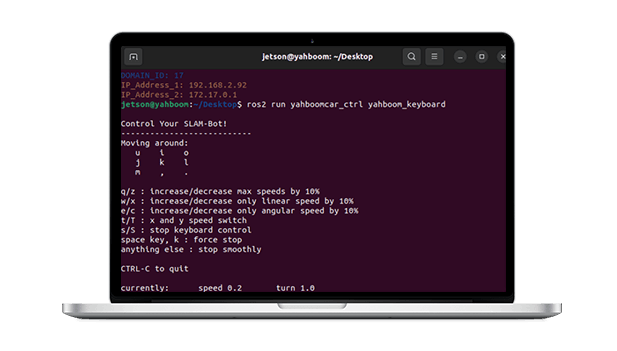
microROS机器人控制板搭载高性能 STM32 主控芯片与 9 轴 IMU 传感器,采用microROS方案驱动两个T-mini Plus 雷达,减少ROS主控端口资源占用。支持4路编码器电机与 6 自由度机械臂驱动,满足多主控供电需求,实现高效、稳定的智能控制系统。
高清触摸7寸屏,支持随时随地调试机器人,通过触摸屏可以直观地查看和设置参数以及监控运行状态,像操作电脑一样方便。
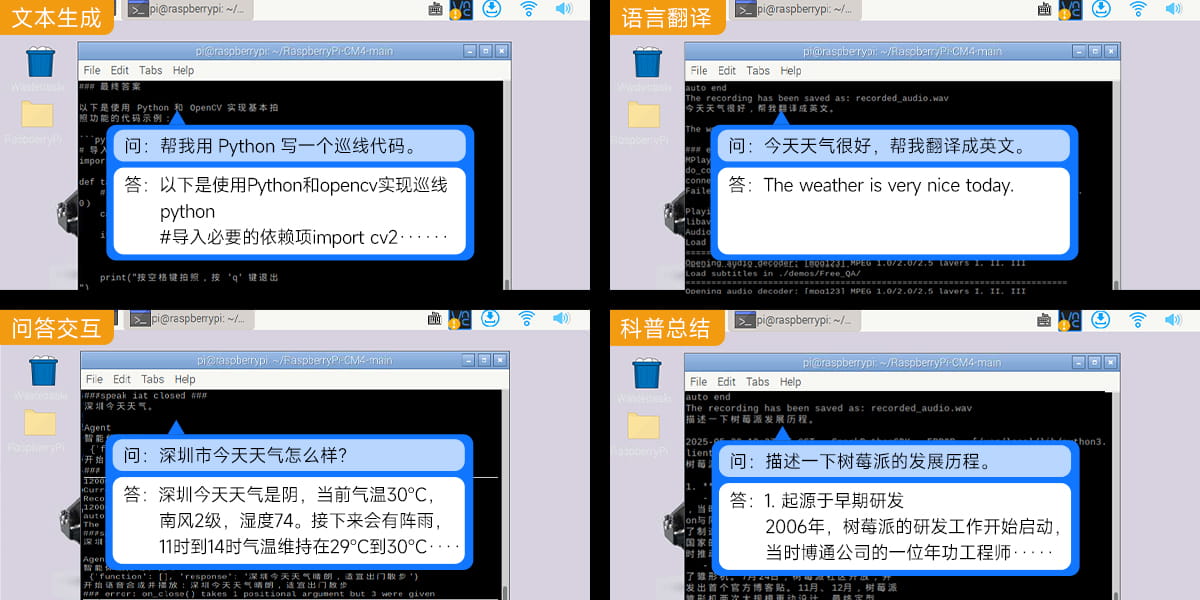
ROSMASTER M3 Pro实时接入通义千问大模型平台,宛如配备“超级大脑”,不仅能理解文本指令,还能灵活应答。
ROSMASTER M3 Pro搭载AI大模型语音模块和扬声器,支持语音与文字实时互转,接入通义千问后,能“听“会“说”,实现智能交互体验。
ROSMASTER M3 Pro搭载 DABAI DCW2 深度相机,能够理解和分析图像内容,精准识别物体,并输出文本和语音反馈。
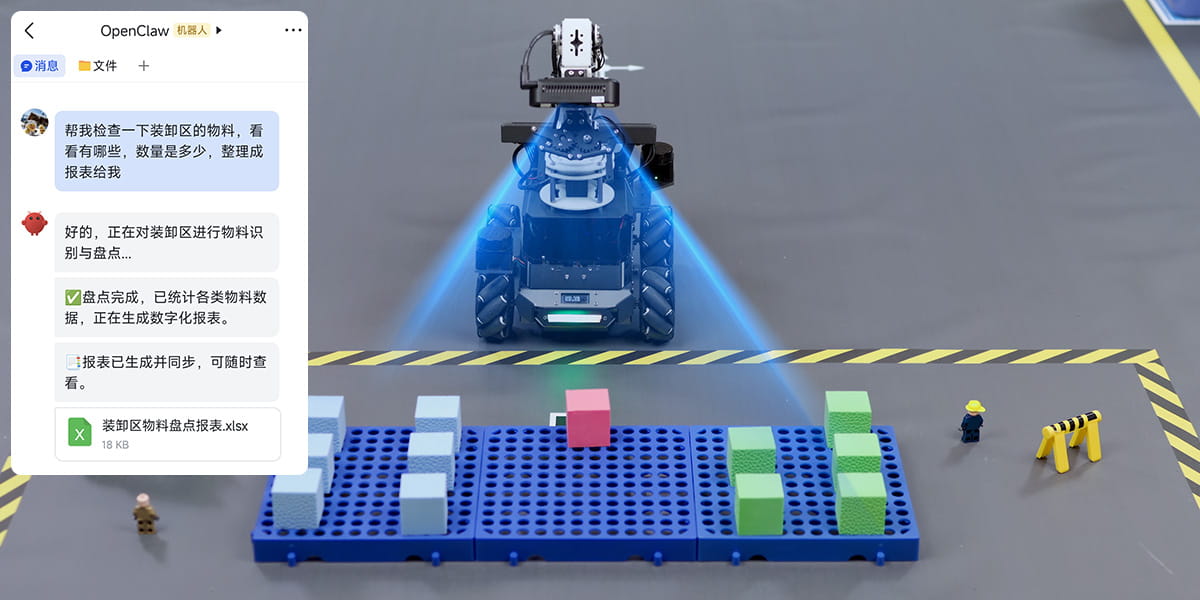
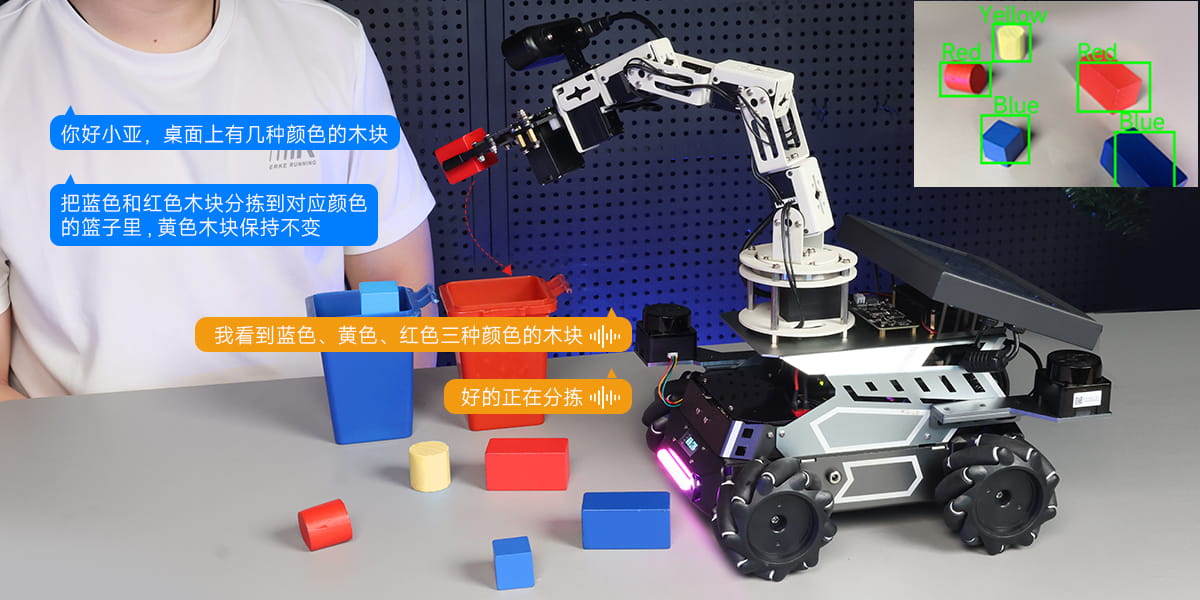
ROSMASTER M3 Pro 能够远程接收复杂的物体分类指令。通过底层视觉算法实时识别目标特征,从而进行逻辑分析自主完成精准分拣,还能向用户发送结构化的数字化汇报。
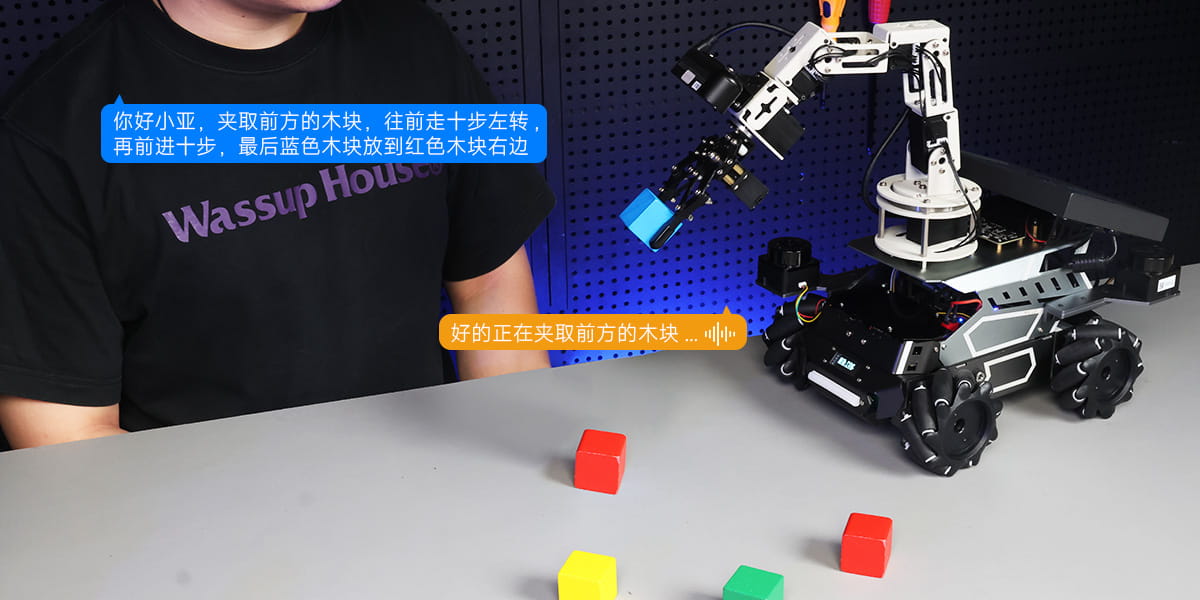
M3 Pro 可以将非结构化语音转化为具备时间逻辑的行动指南,从而确保长链条任务在无人干预下精准闭环。
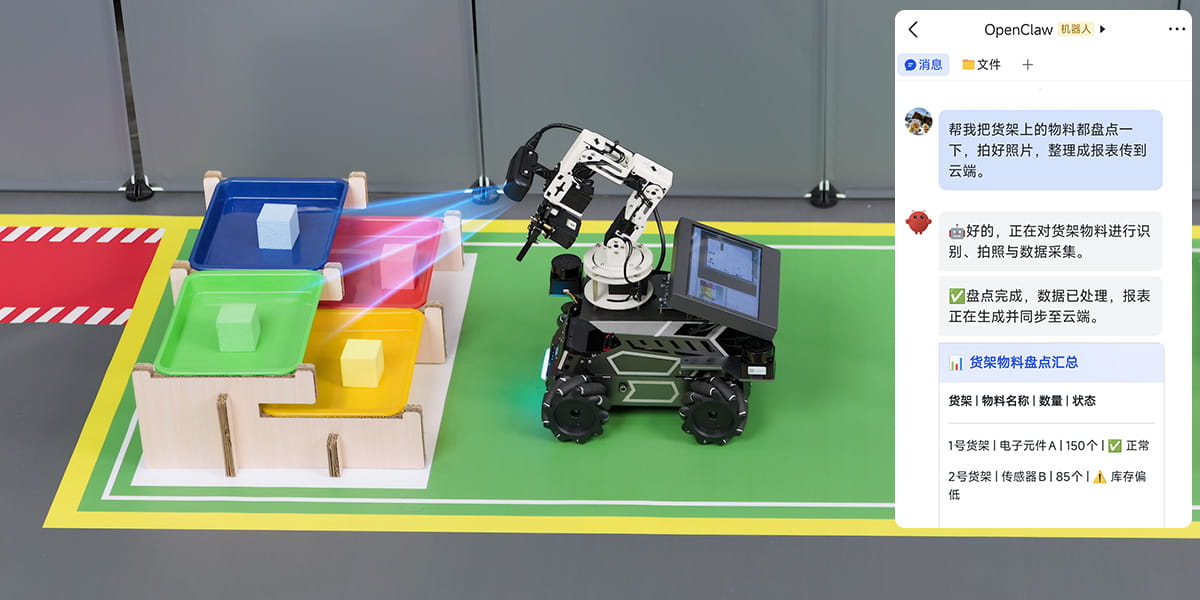
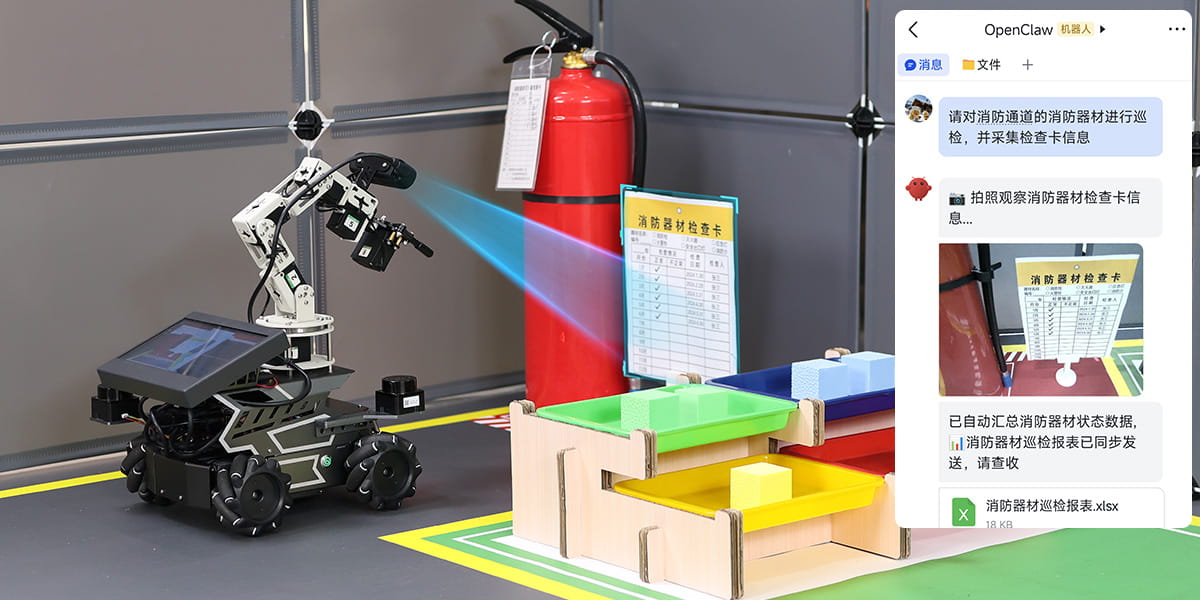
通过 OpenClaw 数据处理,M3 Pro 可以自执行拍照、识别等任务,并将数字化报表等信息同步至云端。
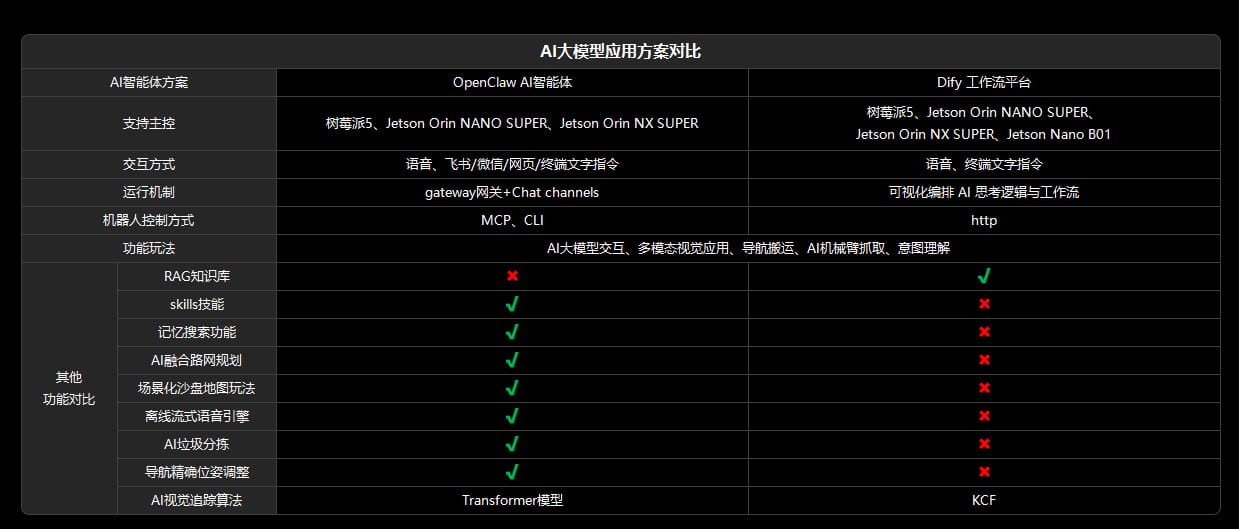
通过 OpenClaw 将复杂的工作逻辑转化为skills 技能集,支持AI自主调用skills技能快速完成复杂任务,同时支持用户自定义扩展更多技能。
内置机器⼈通⽤ MCP、CLI 协议接⼝,原⽣深度集成 OpenClaw ⽣态,免复杂开发,让AI快速对接机器人、⼀键联动部署。
摆脱死板设定,面对任务外的异常情况,能自主思考并迅速执行补救策略。
赋予机器人记忆搜索能力,遇相似场景可搜索历史记忆,按既定流程完成任务。
依托多模态大模型的高阶逻辑推演和OpenClaw的长效任务调度,M3 Pro 能将复杂指令拆解并翻译为机器人可执行的连贯动作,实现从模糊语义到精准作业的自动化闭环。
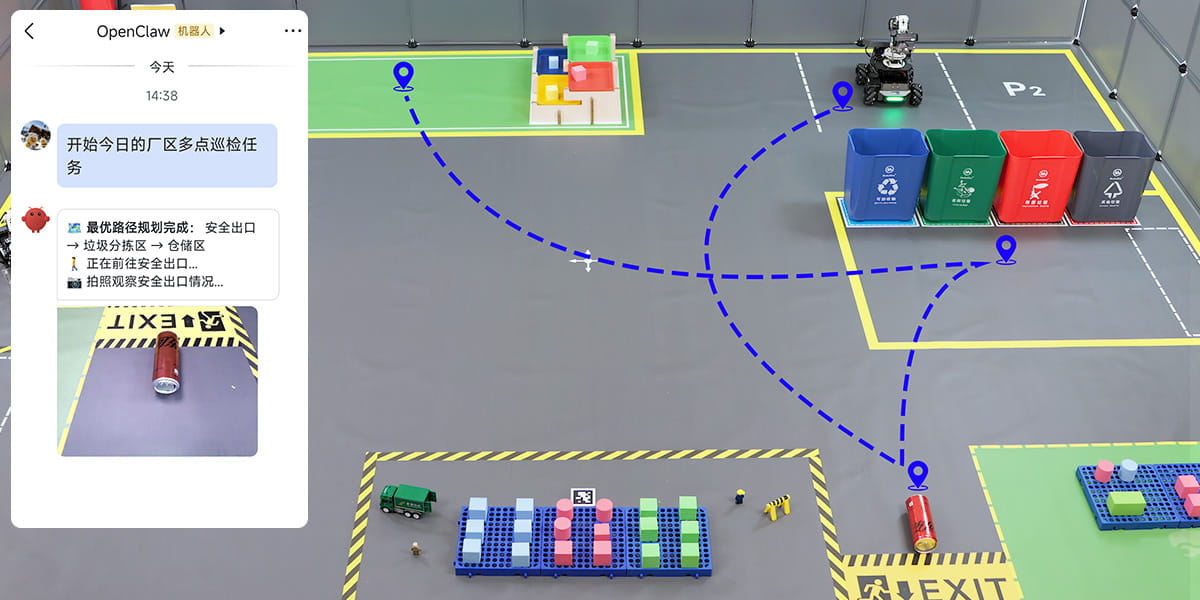
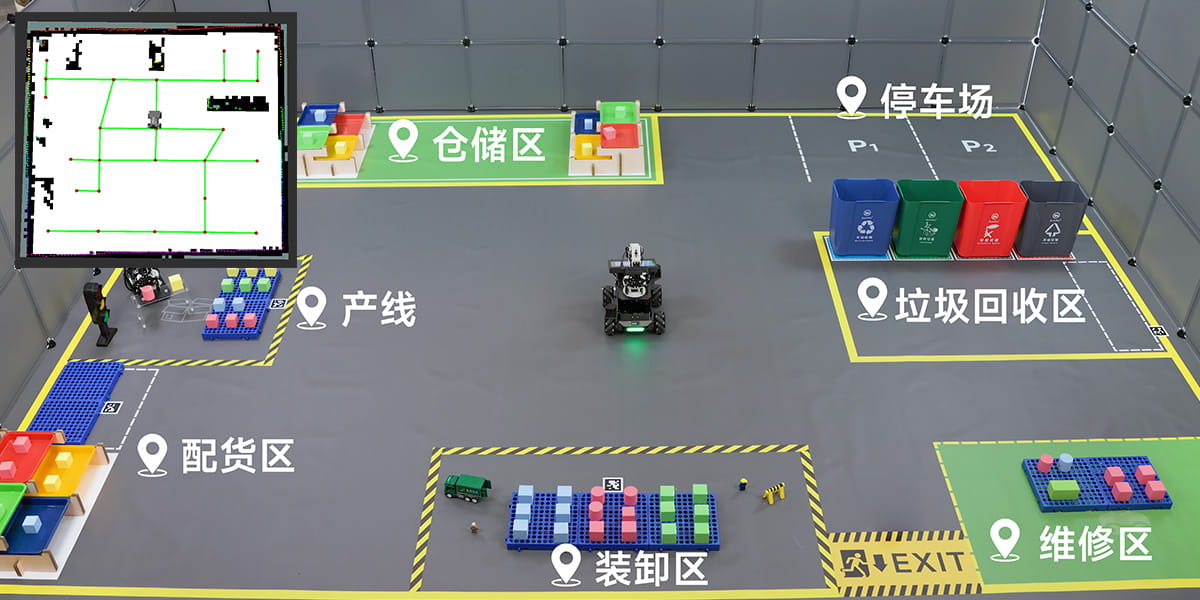
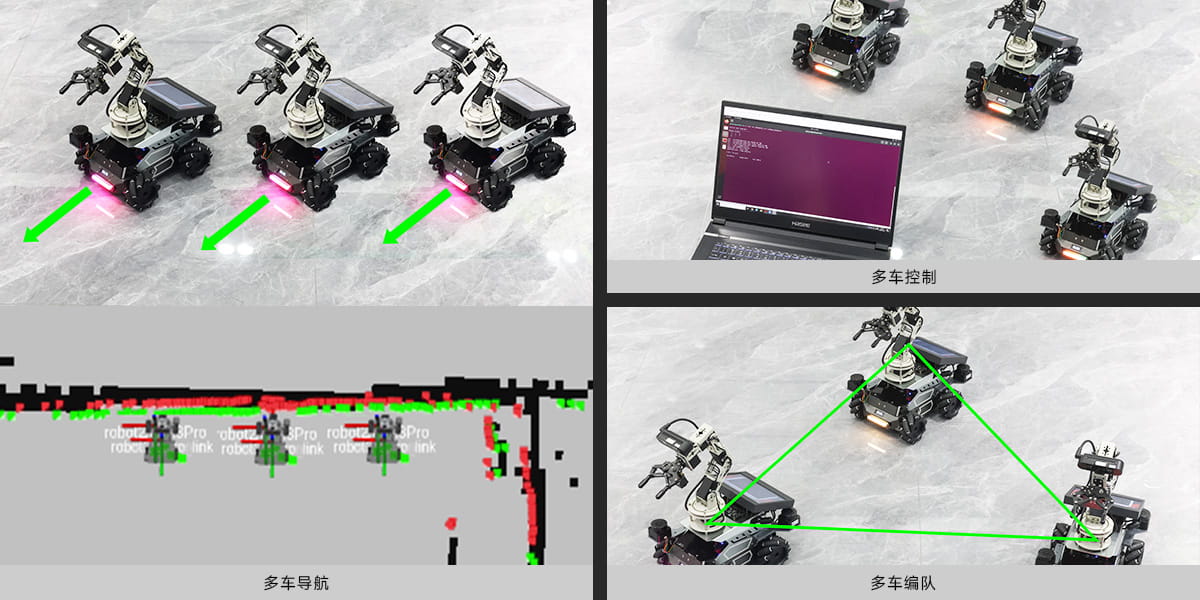
M3 Pro 能够深度理解现场环境并建立空间认知。在多点巡航中,它不仅能自主规划最优路径、灵活避开动态障碍,更能在移动中实时分析视觉信息,精准完成每一次导航与交互任务。
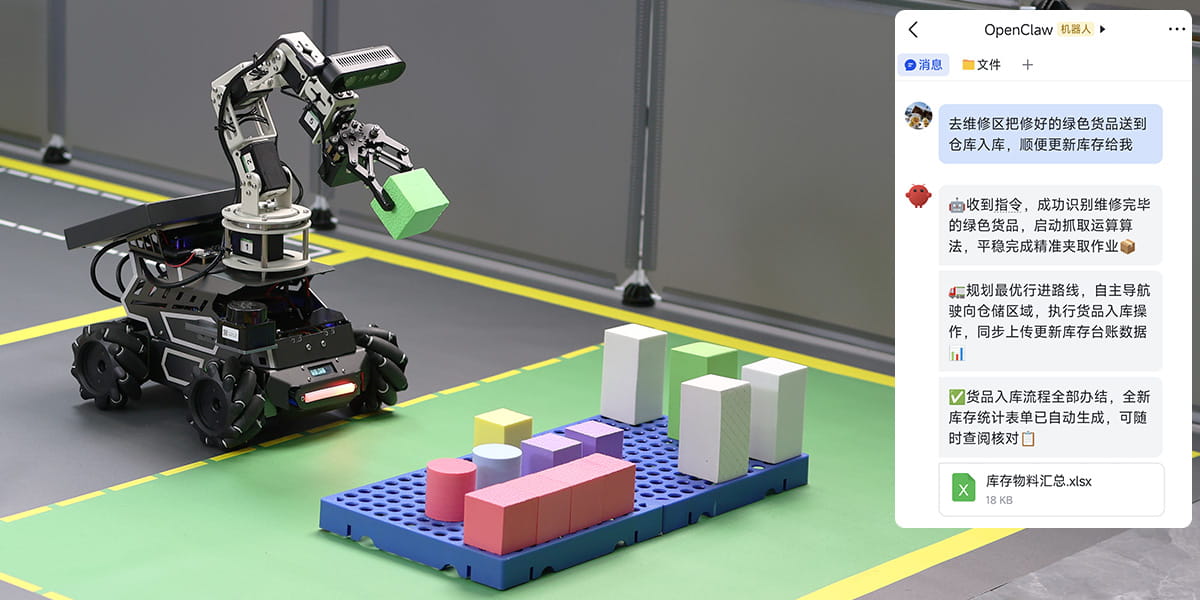
M3 Pro 能够精准捕捉视野内的信息,并分析现场数据,将物理环境信息自动汇总转化为直观的决策报表,真正打通从'现场感知'到'数据交付'的智能化闭环。
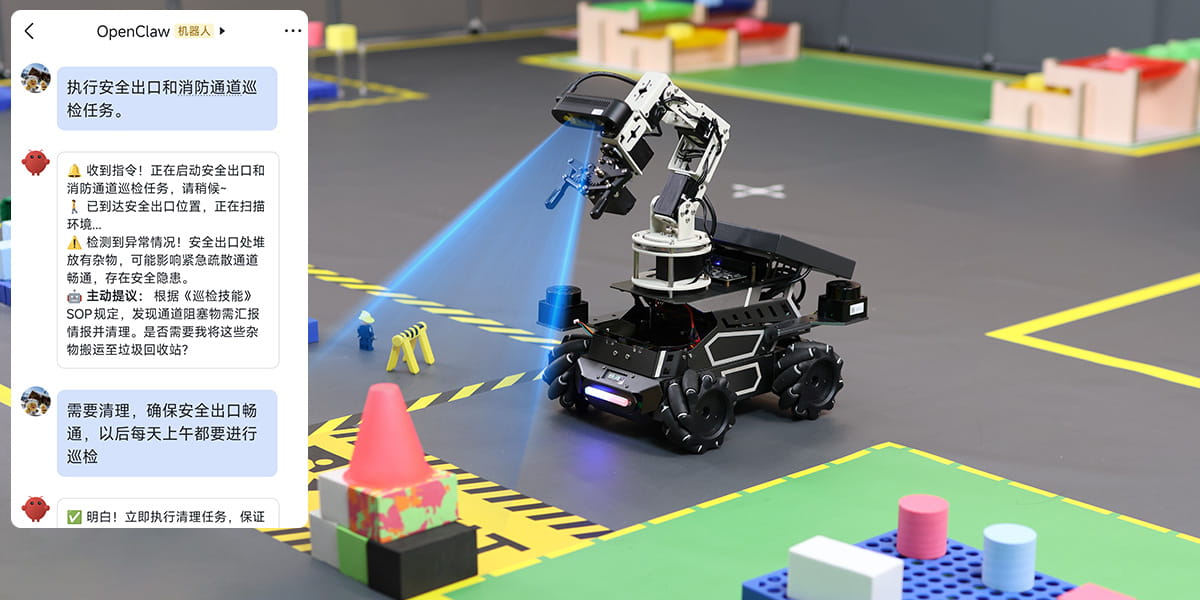
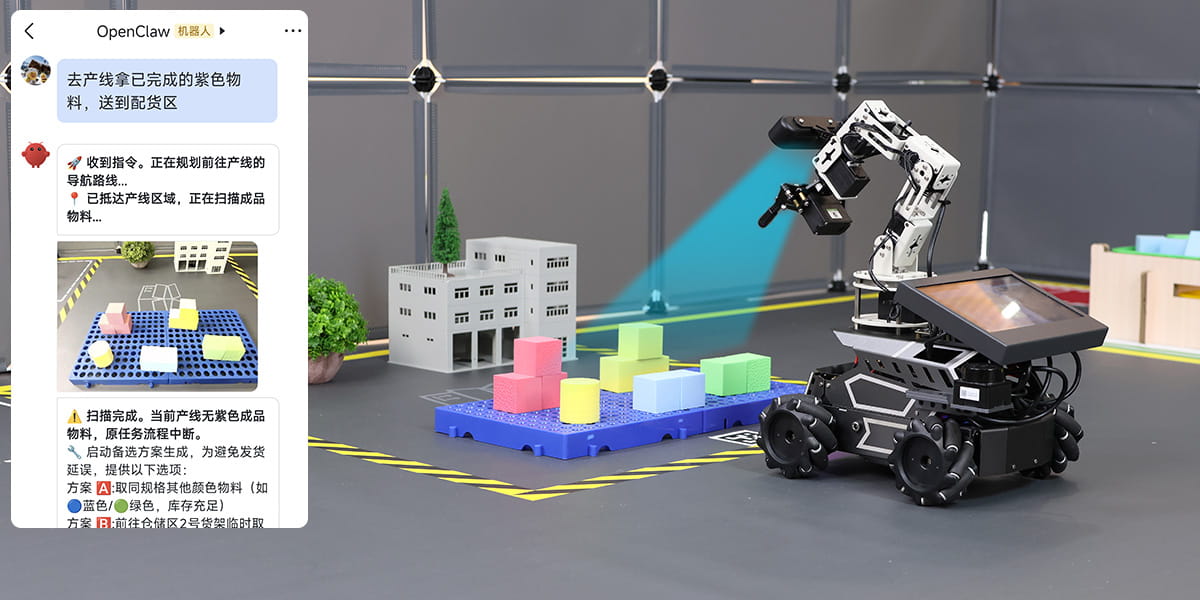
依托全局态势感知,M3 Pro 在面临异常状况或模糊指令时,能够主动排查现场,提出最优的替代方案并请求授权,确保业务流程高效流转不中断。
M3 Pro 借助多模态AI大模型,可以实时研判现场环境及物品状态,让机器人能够自主调用高阶逆运动学算法、精准抓取搬运等底层算法及程序,大幅提升复杂作业场景下的效率。
依托日常交互沉淀的环境记忆,M3 Pro 能记住历史目标物与与场景关联,在面临相似场景时,机器人可自主唤醒并复用历史执行策略,实现认知与行动的高效闭环。
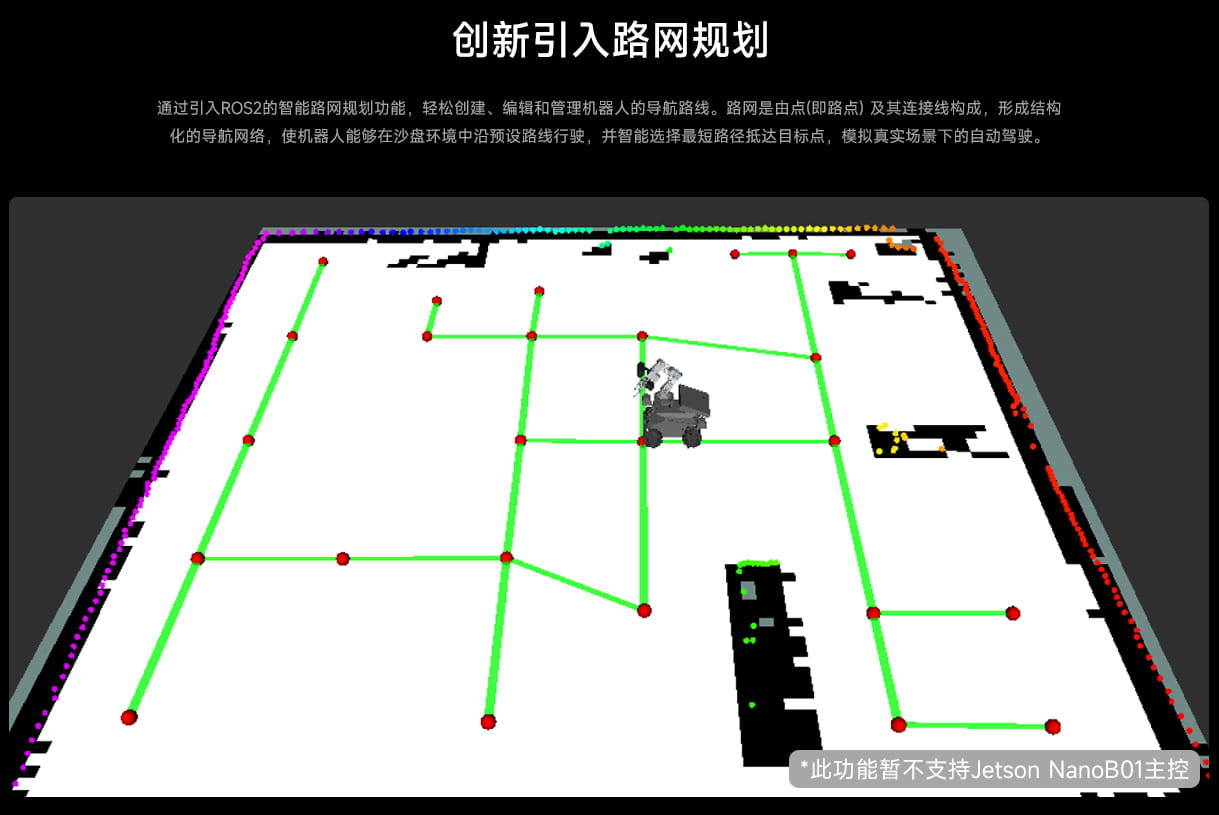
M3 Pro 依托 AI 大模型进行调度决策,将 OpenClaw 与 SLAM 路网深度融合,使机器人能够精准解析地图路网数据并按固定路线在不同点位间穿梭,适配工厂固定作业路线的应用场景。
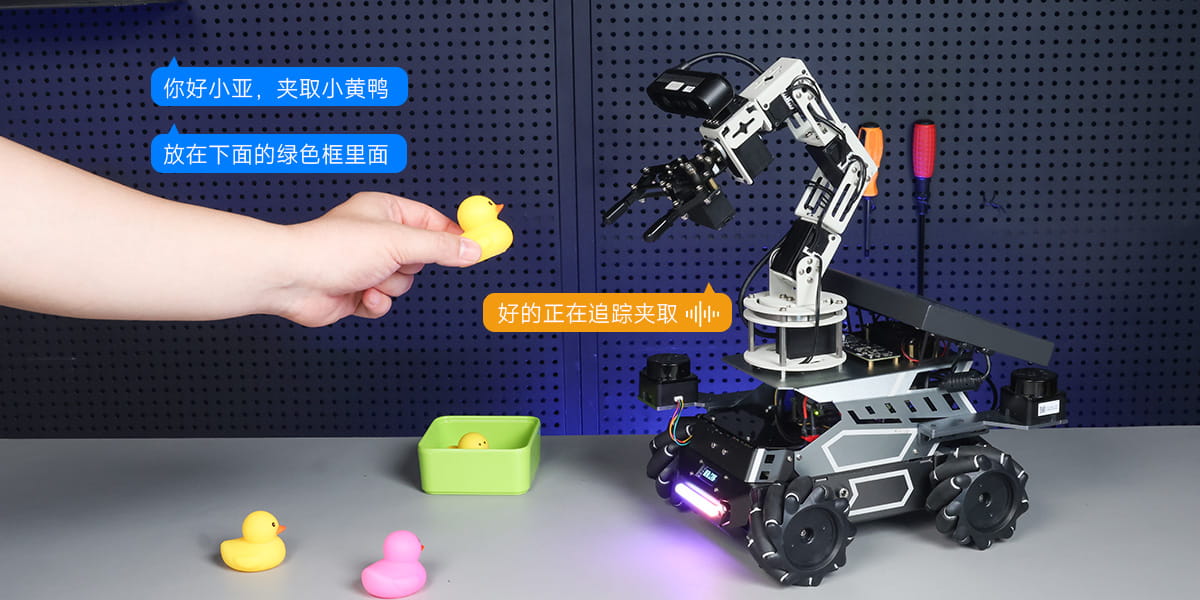
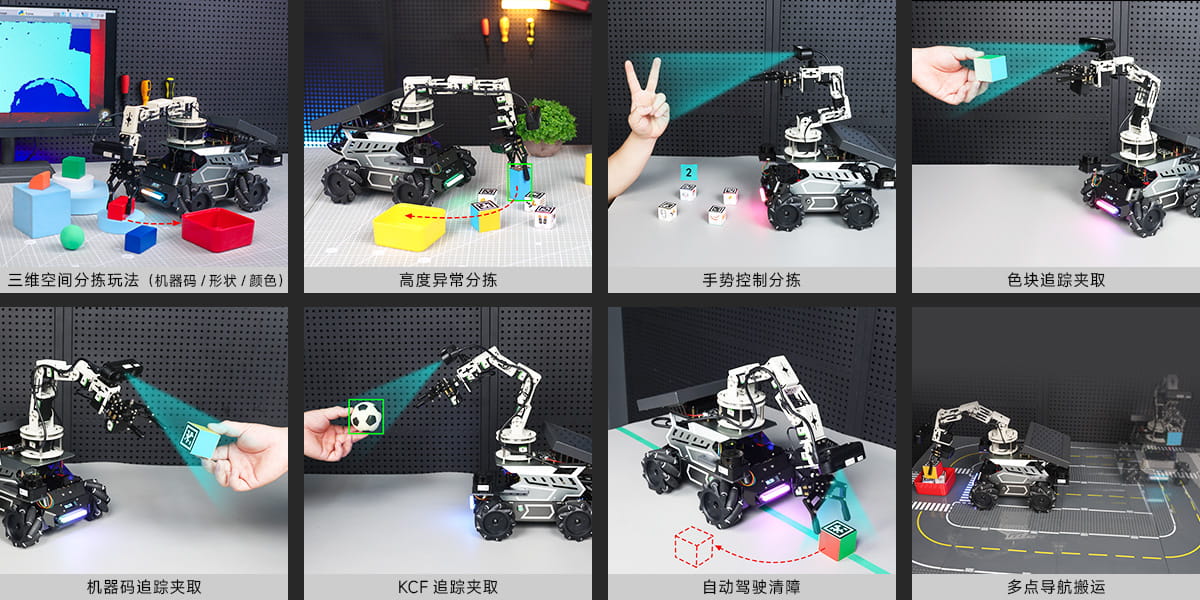
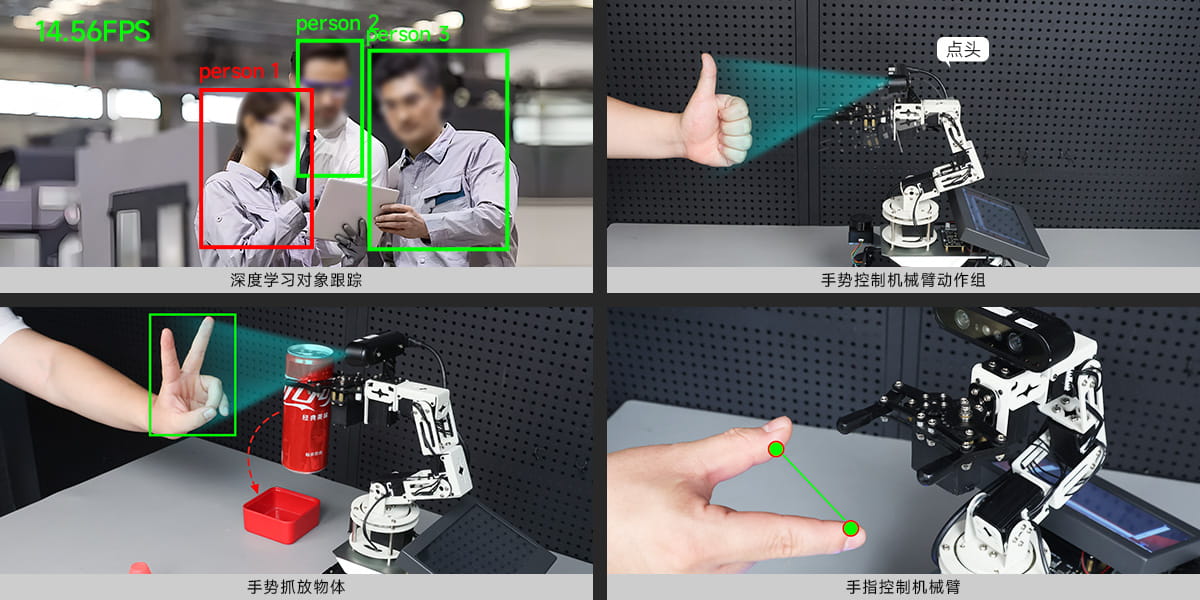
借助视觉大模型的强大分析能力,ROSMASTER M3 Pro能够在复杂环境中自动识别并锁定目标物品,实现实时追踪任务。
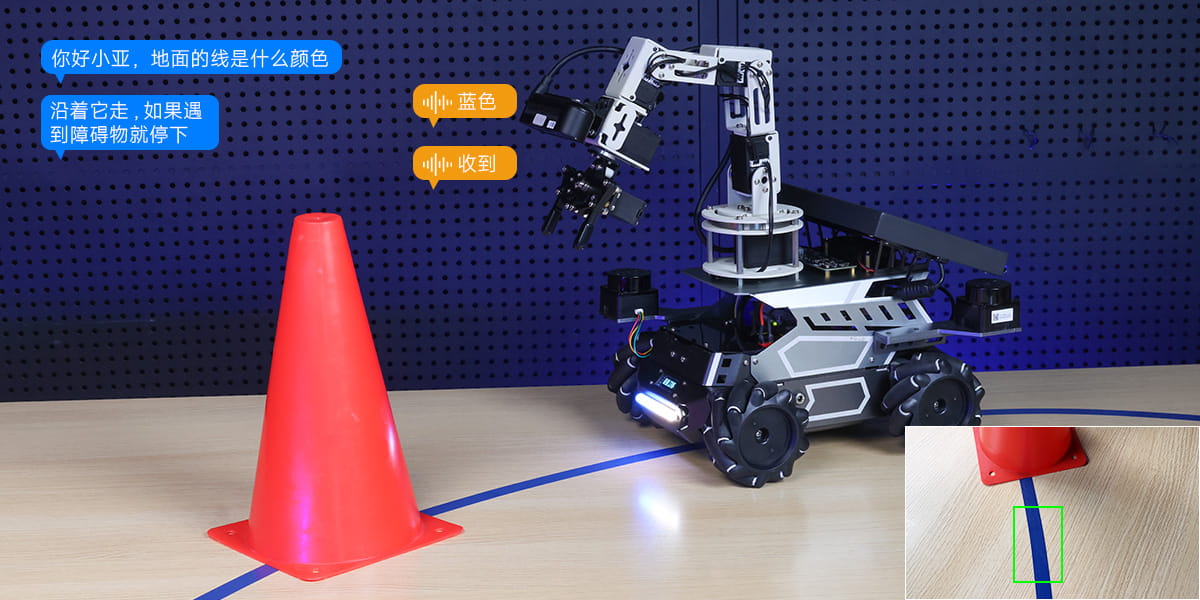
通过大模型的语义理解和视觉大模型分析,ROSMASTER M3 Pro能够精准识别并实时追踪各种颜色的线条,实时自主巡航。
通过视觉大模型分析,ROSMASTER M3 Pro可以追踪视野范围内的任意颜色,并将其锁定,通过KCF+PID算法,实现目标颜色追踪。
ROSMASTER M3 Pro可精准识别视野范围内的任意物品,并基于用户语音指令进行运动决策,实现高效、准确的自动化分拣。
ROSMASTER M3 Pro可根据用户指令对视野中的任意运动物体进行动态追踪,在合适时机完成夹取动作后,根据用户指令放置在对应的地点。
ROSMASTER M3 Pro能够拆解用户的复杂语音指令,自主完成复杂路径下的物品搬运任务,展现出高度集成的环境理解与任务执行能力。
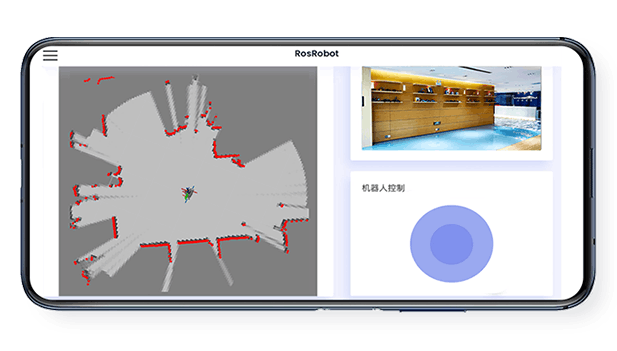
支持IOS/Android
立即下载
亚博智能配备精心研发的配套课程资料,提供基础理论知识与实操案例教程,内容由浅入深,方便用户快速上手学习。
原创中英文视频教程,资深ROS工程师手把手带您玩转ROSMASTER M3 Pro。
提供源码解析,同时配备资深工程师手把手带您玩转ROSMASTER M3 Pro。