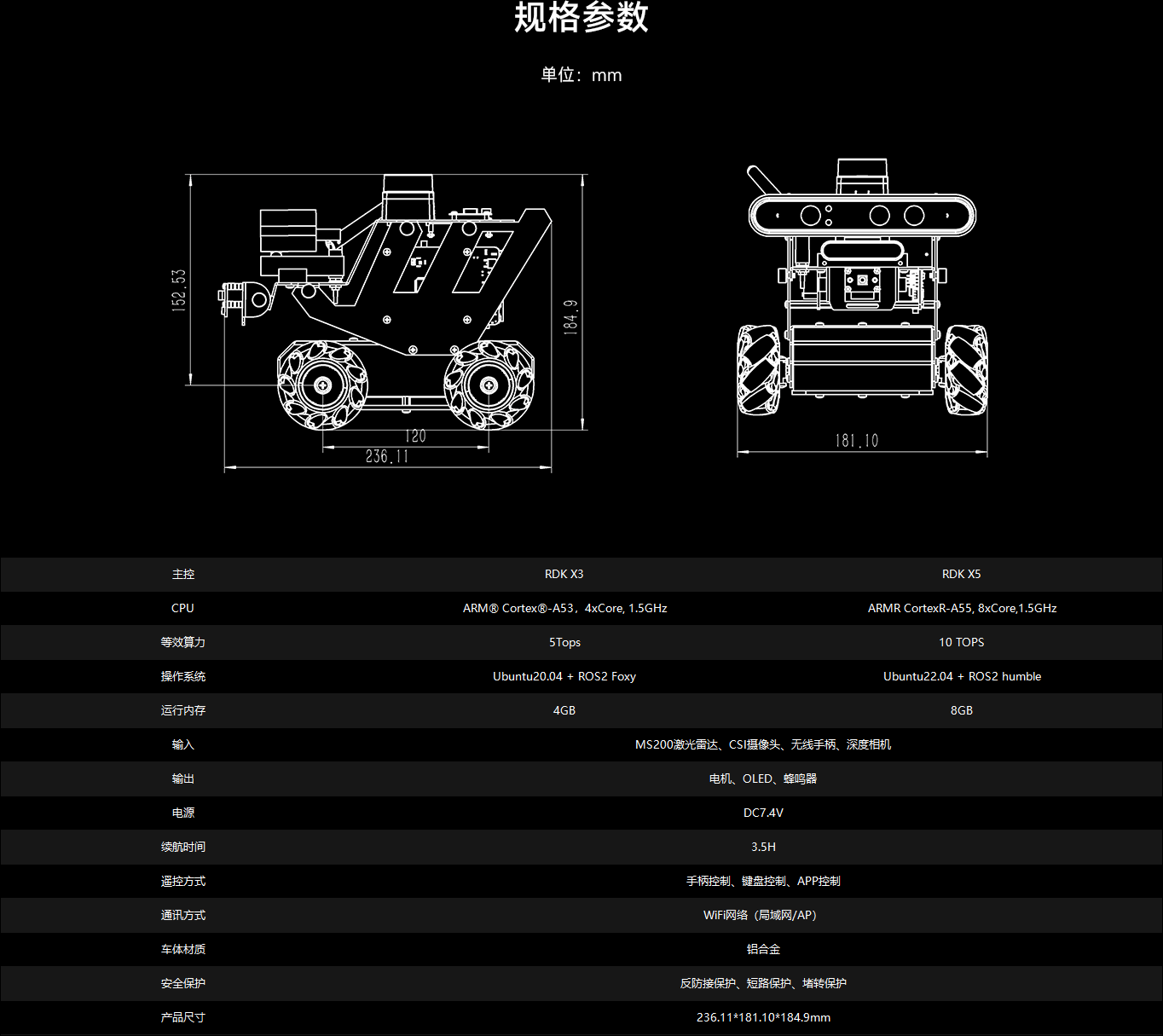
RDK X3 ROBOT
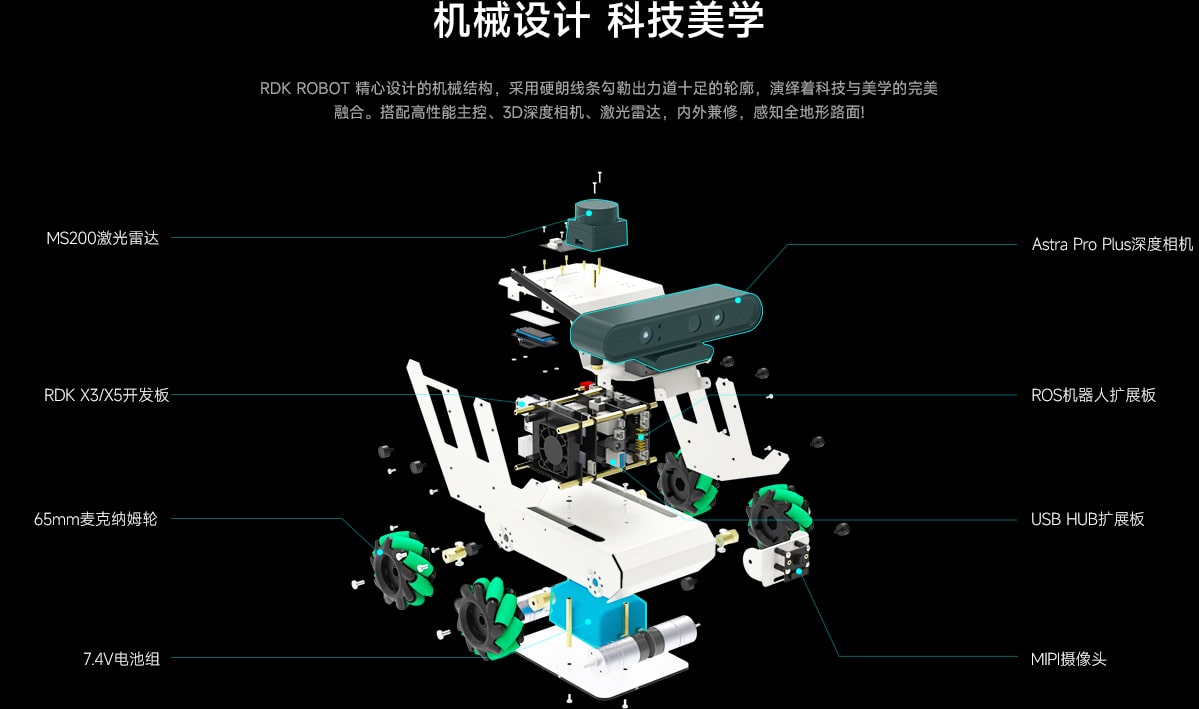
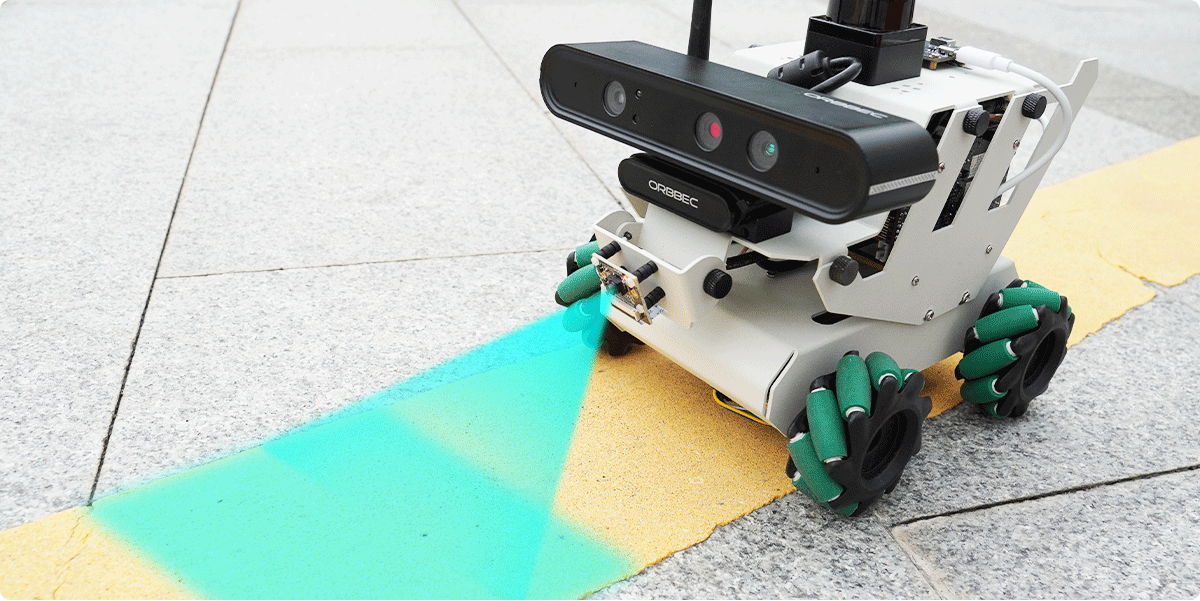
奥比中光Astra Pro Plus深度相机,支持手动调节俯仰角度,不仅可实现高清摄像头所有Al视觉玩法,还能实现深度图像数据处理、三维导航建图等进阶玩法。
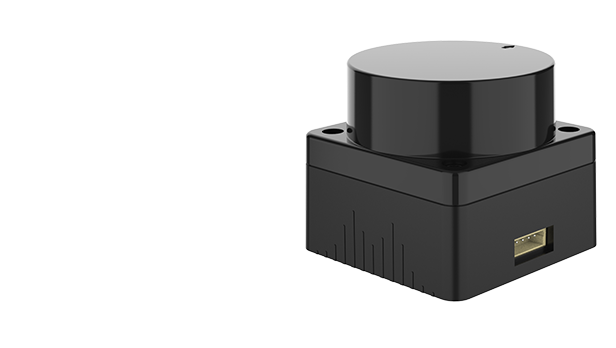
MS200采用TOF测距方式,抗30Klux的强光照射,支持室内、室外建图导航,测量半径可达12m,测量盲区仅为3cm,2米内测距误差±2mm,采样频率4500次/s,扫描频率7HZ~15HZ,支持230400bps通讯速率,测量速度既快速又准确。
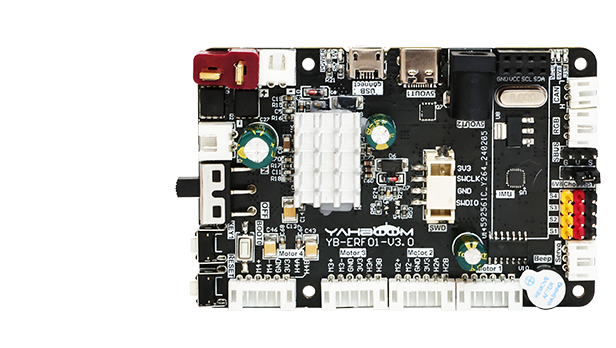
专为ROS机器人小车开发设计,可控制驱动麦轮、阿克曼、四轮差速、两轮差速、全向轮、履带等机器人底盘,ROS主控可通过扩展板预留的microUSB串口接口和CAN总线接口进行通信控制,同时扩展板预留5V和12V电源接口,支持树莓派5供电协议,满足各ROS主控供电需求。板载九轴IMU姿态传感器,可实时获取机器人姿态信息;具备5V/7.4V PWM舵机和串行总线舵机驱动接口,适配多种常见机械臂。驱动代码及硬件原理图均开源。
USB3.0 HUB扩展板旨在解决主板USB接口不足、USB外设增加导致供电不足等问题,它通过使用USB3.0通信的接口和HUB芯片扩展4个USB接口,保障接口高速数据传输;支持ROS机器人/小车、树莓派/Jetson系列主板,无需驱动,即插即用。
310编码器减速电机配有强磁码盘,通过AB两相输出脉冲信号,可以检测电机转动方向和速度,结合PID算法控制速度,适合各类转速要求高的智能小车使用。如麦克纳姆轮小车,竞赛小车,导航定位小车等。
机器人标配7.4V 6600mAh大容量高功率动力电池组,为机器人提供源源不断的续航动力。
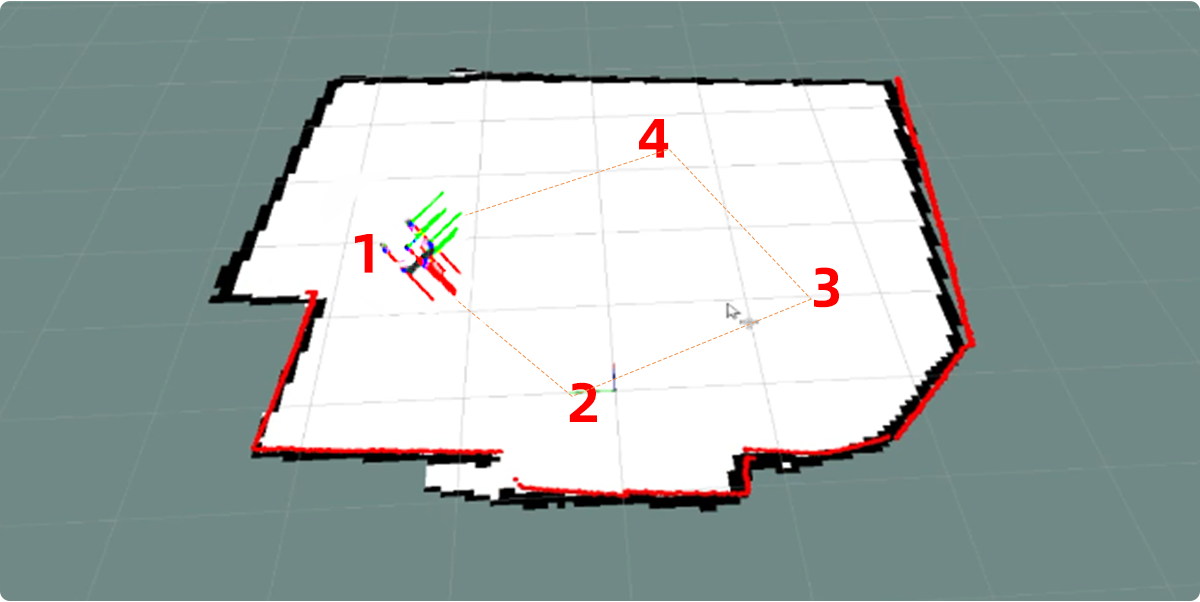
可通过设置目标点实现小车的单点和多点导航。
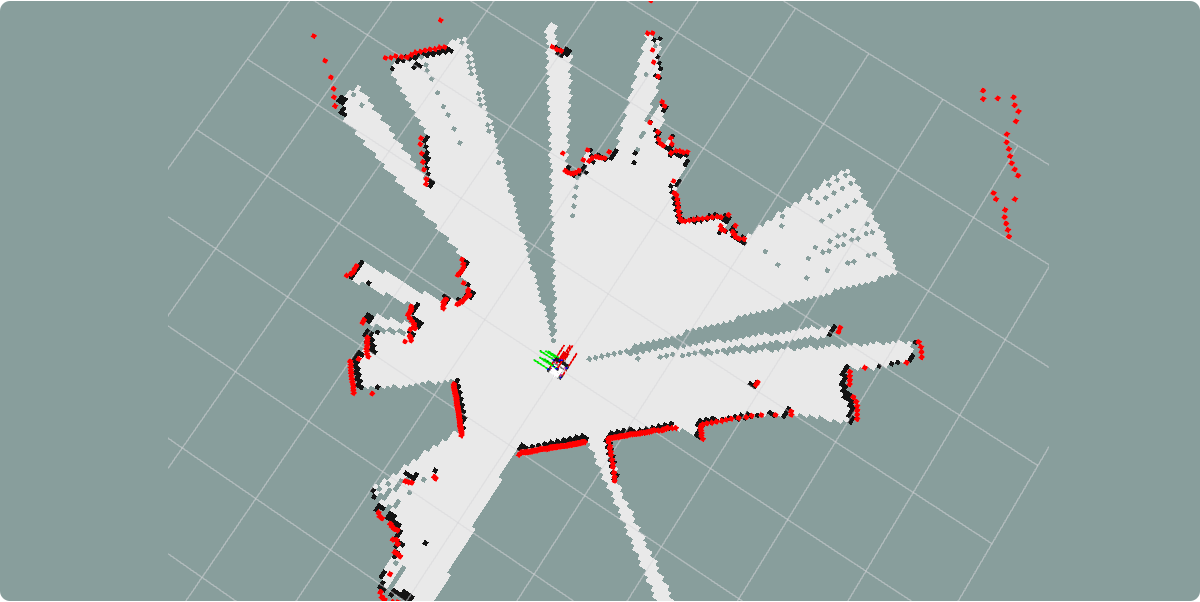
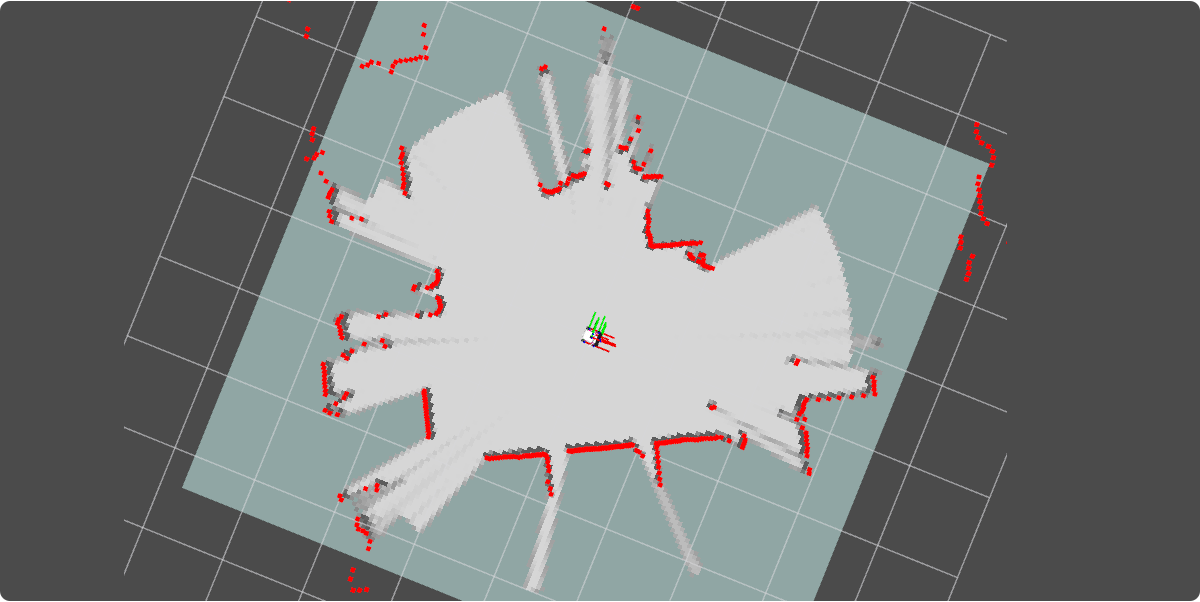
Gmapping可以实时构建室内地图,在构建小场景地图所需的计算量较小且精度较高。
Cartographer是Google开源的一个ROS系统支持的2D和3D SLAM库。
激光雷达可实时检测周围环境,自主避开前方障碍物。
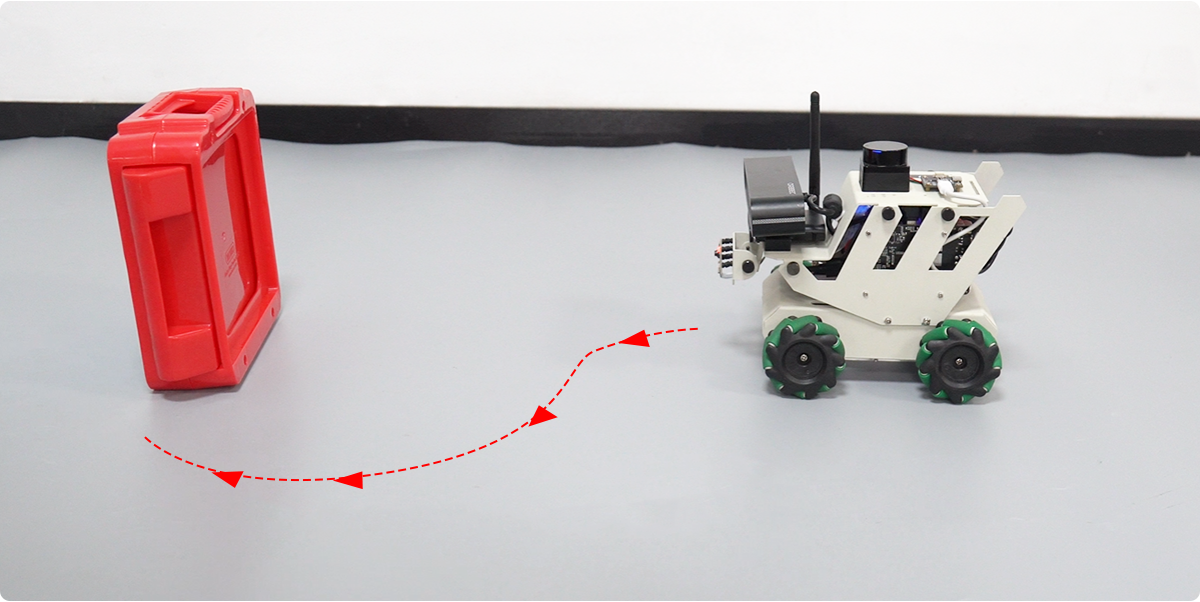
激光雷达可实时检测周围环境,实时跟随距离雷达最近的目标进行运动。
通过ROS动态参数调整工具选择路径,小车按路径进行巡逻。
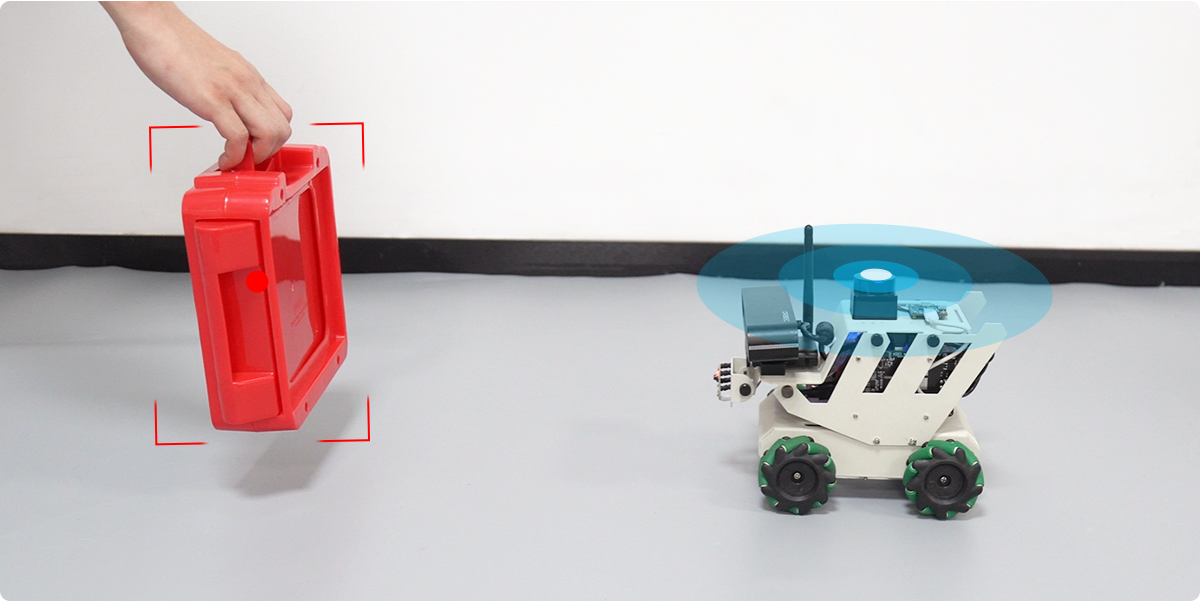
距离雷达较近的目标将被锁定,车头始终朝向最近的目标。
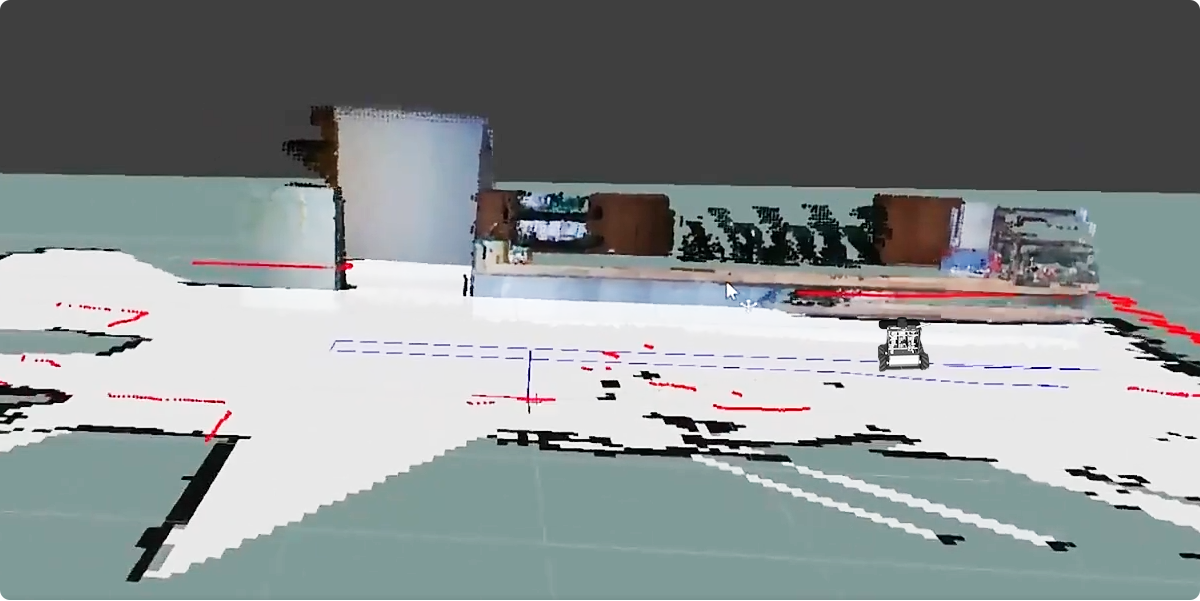
运用RTAB算法将视觉与雷达融合,实现了机器人三维视觉建图和导航避障,支持全局重定位,自主定位。
通过获取深度信息,小车将与被追踪的物体保持1米的距离,并且时刻保证被追踪的物体保持在画面中心。
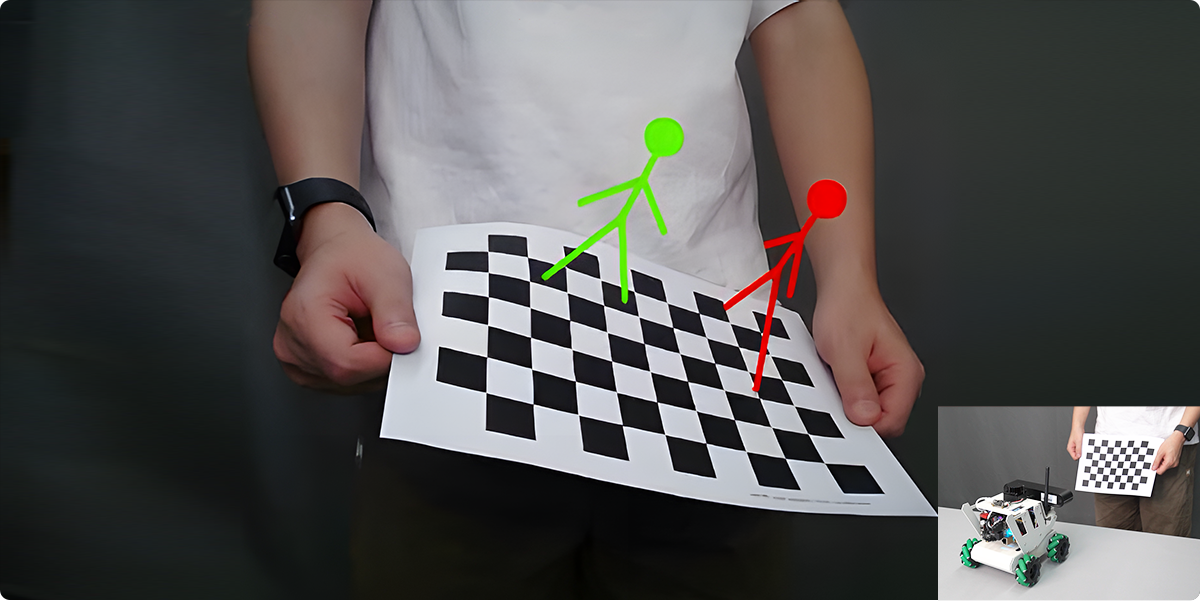
系统预设多种AR图像,通过配合棋盘格纸,AR现实增强图像可实时呈现画面棋盘格纸上。
基于图像的相关KCF算法可选定图像中的任意物体,实时跟随目标。
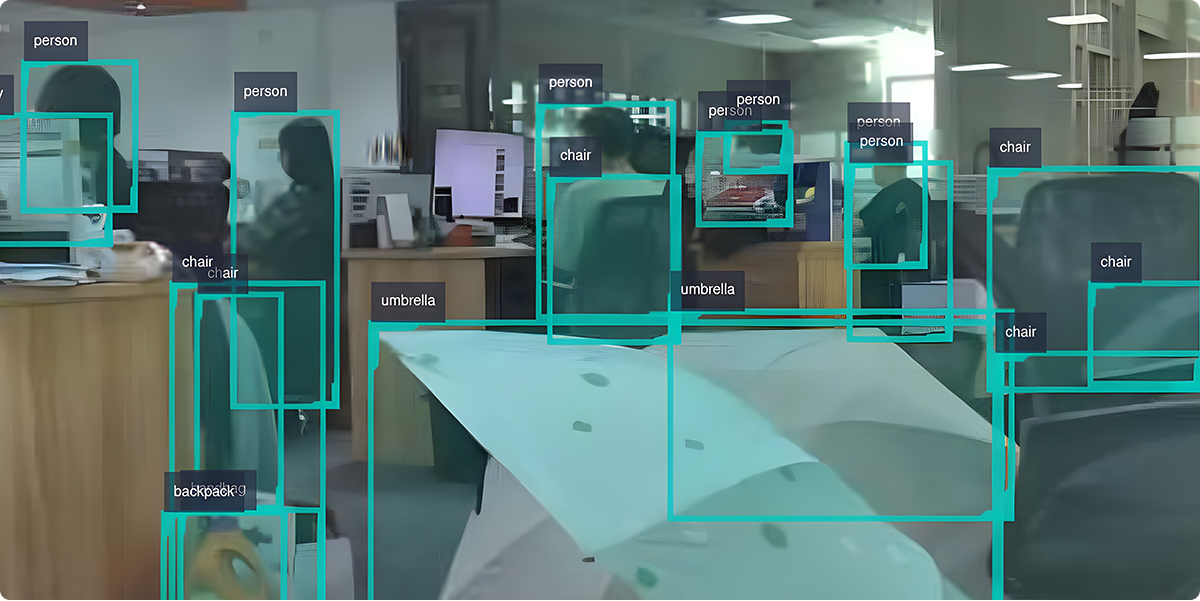
通过MediaPipe开发框架完成手部检测支持检测包括人、动物、水果、交通工具等共80种类型的物体。
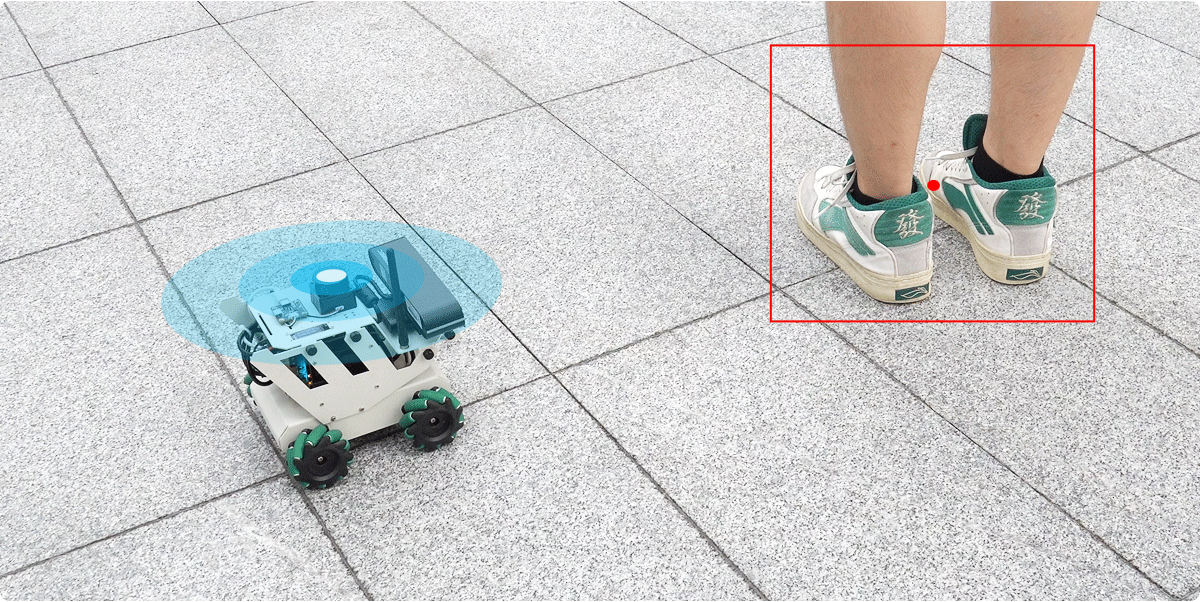
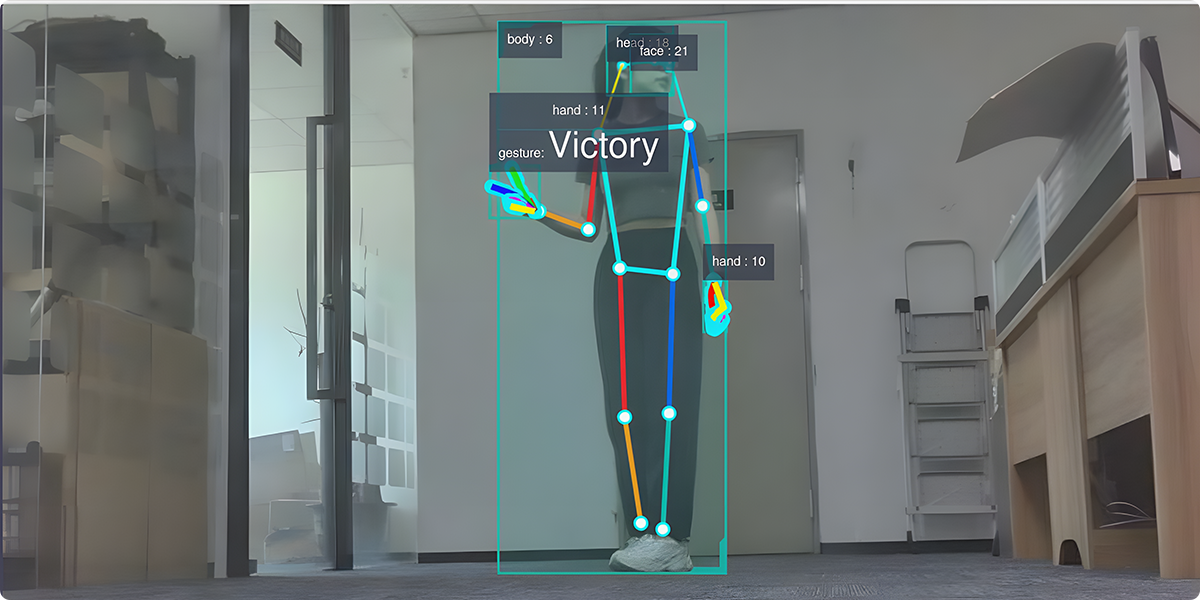
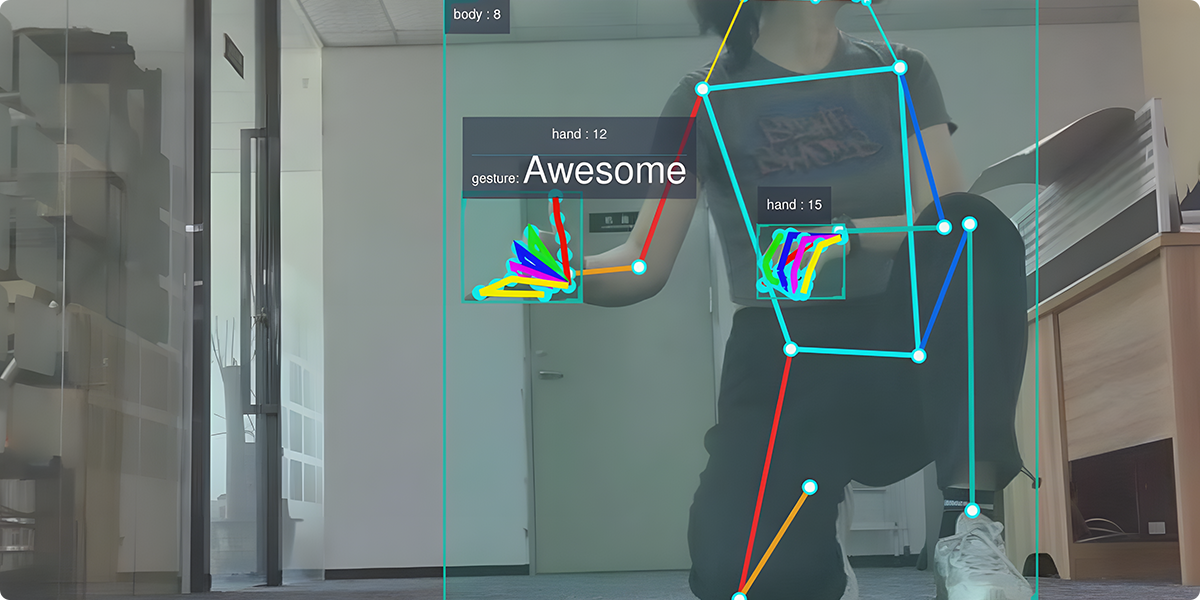
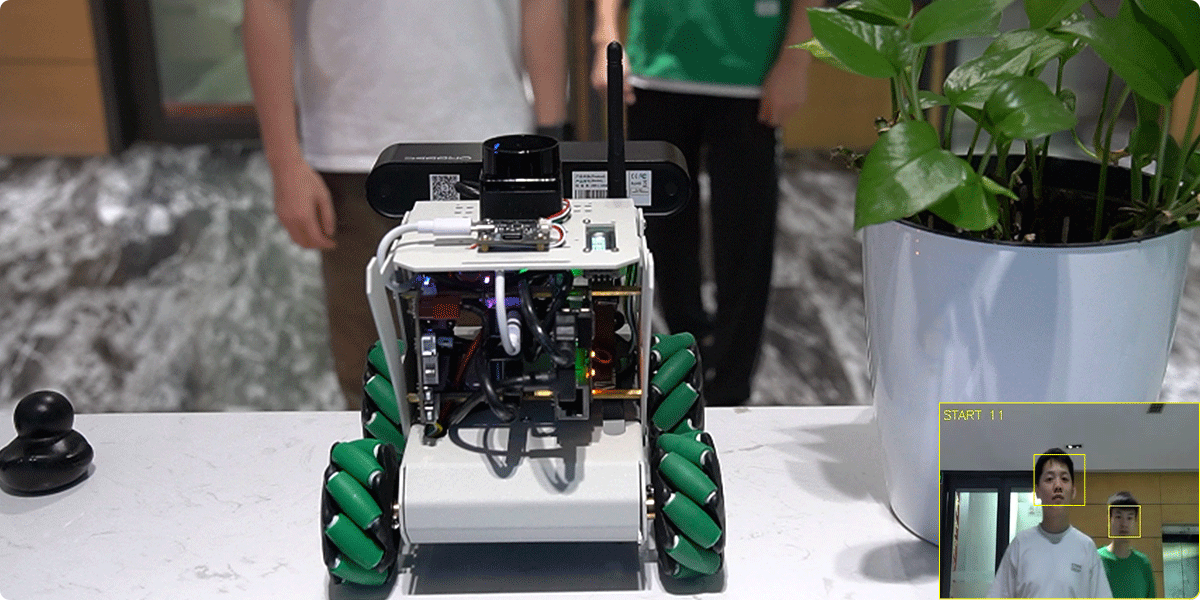
控制机器人跟随人体移动,可识别包含人体、人头、人脸、人手框和人体关键点。
通过手势控制机器人小车运动,包括左右旋转和前后平移运动。
视觉巡线包含OpenCV颜色巡线和深度学习,适应多种不同巡线场景。
使用Haar人脸特征检测图像,实时将图像中的人脸框出来,并范围人脸在图像中的位置信息。
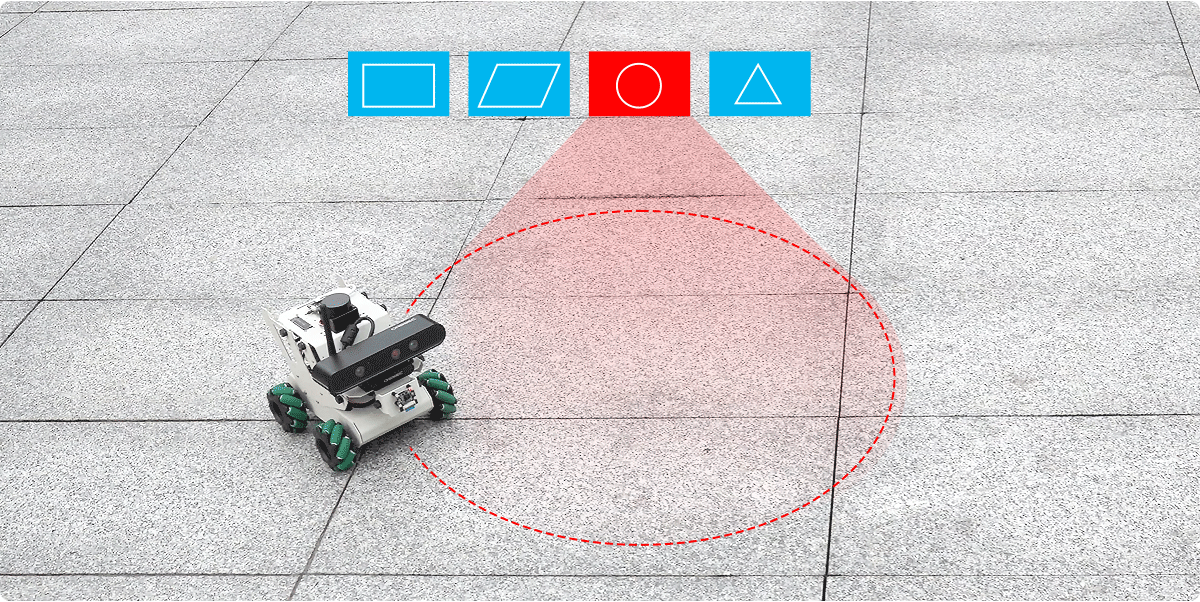
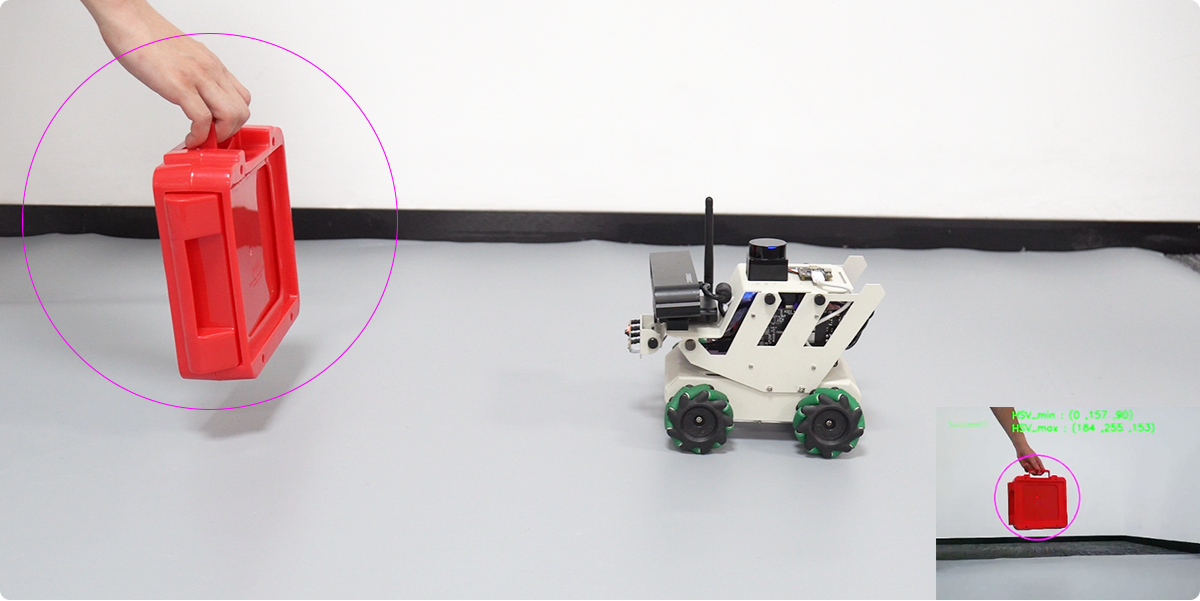
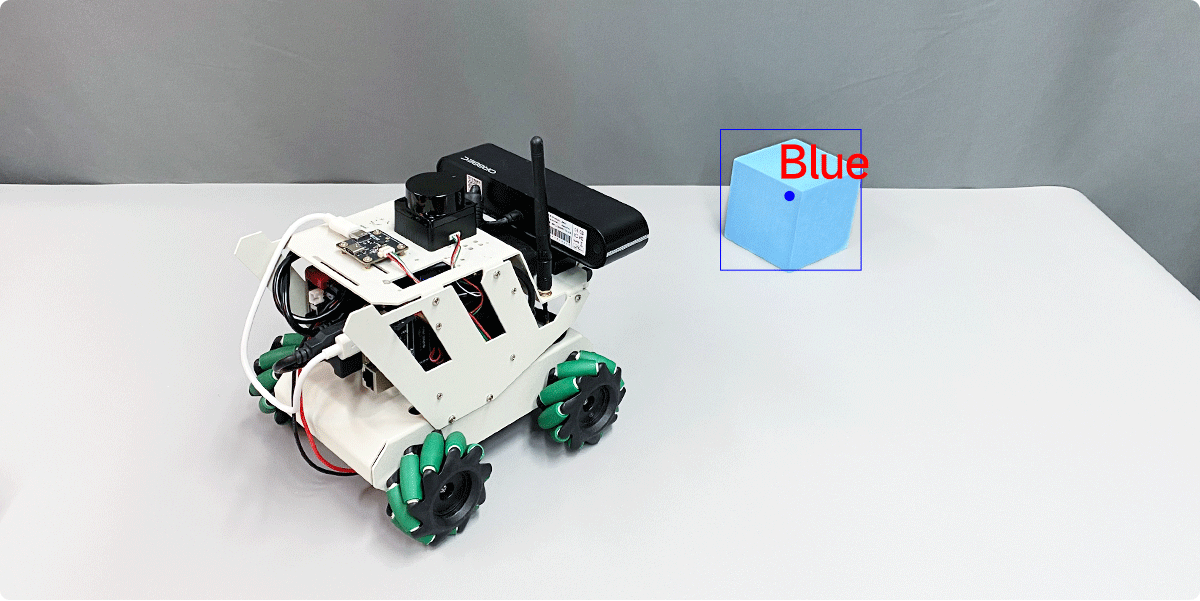
比对图像颜色HSV值,识别红绿蓝黄颜色,追踪/跟随选定的颜色。
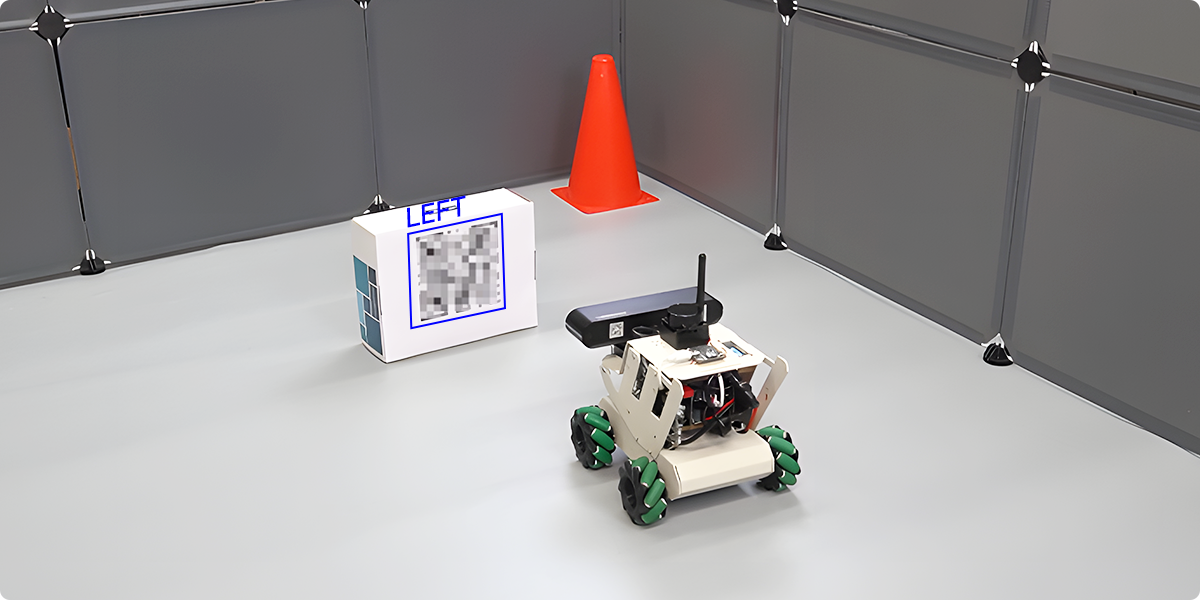
分析图像中二维码的payload数据信息,根据预定的信息执行不同的指令。
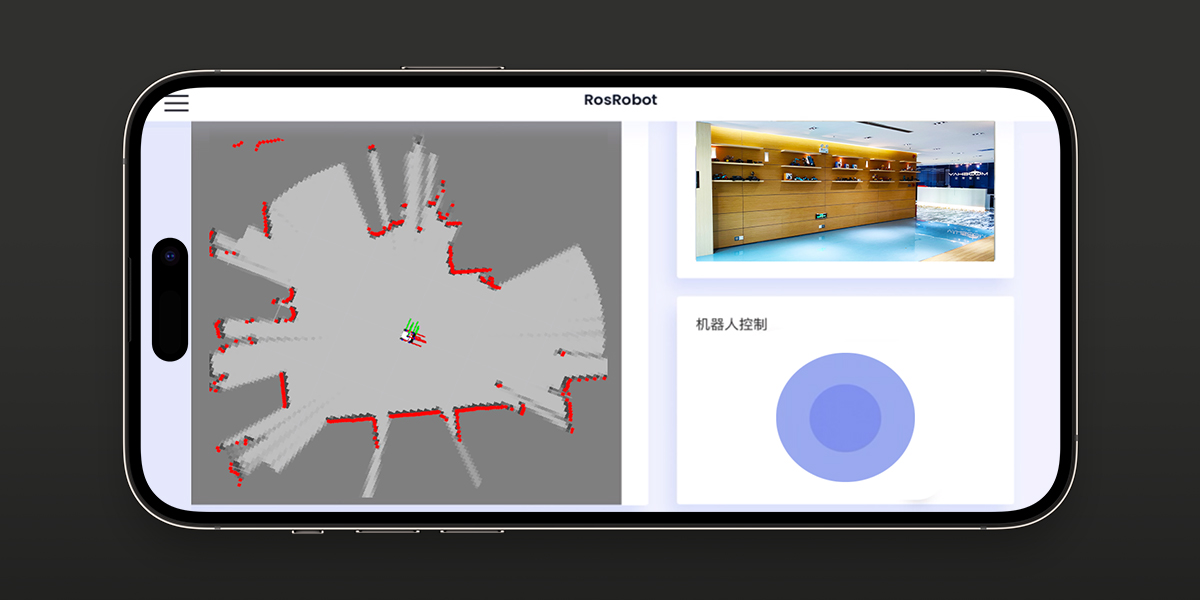
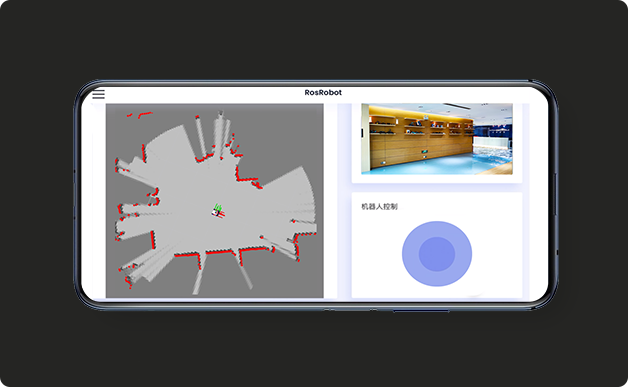
支持安卓/IOS手机APP控制
方便机器人控制、建图、采集数据、训练等操作。
突破传统遥控的局限,只需敲击键盘上的按键,即可轻松实现小车前进、后退、左右转向等动作。
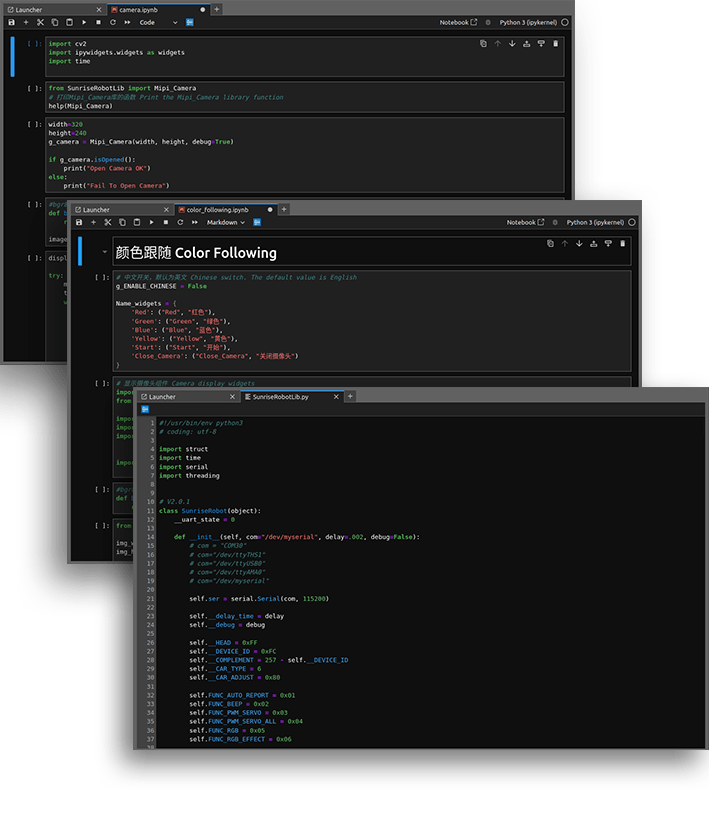
用户可以直观地编写、运行Python代码,实时监控并调整智能小车的各项参数,通过简洁明了的代码,可以让没有编程经验的初学者迅速上手,感受编程逻辑与小车同步控制的乐趣。
点击查看
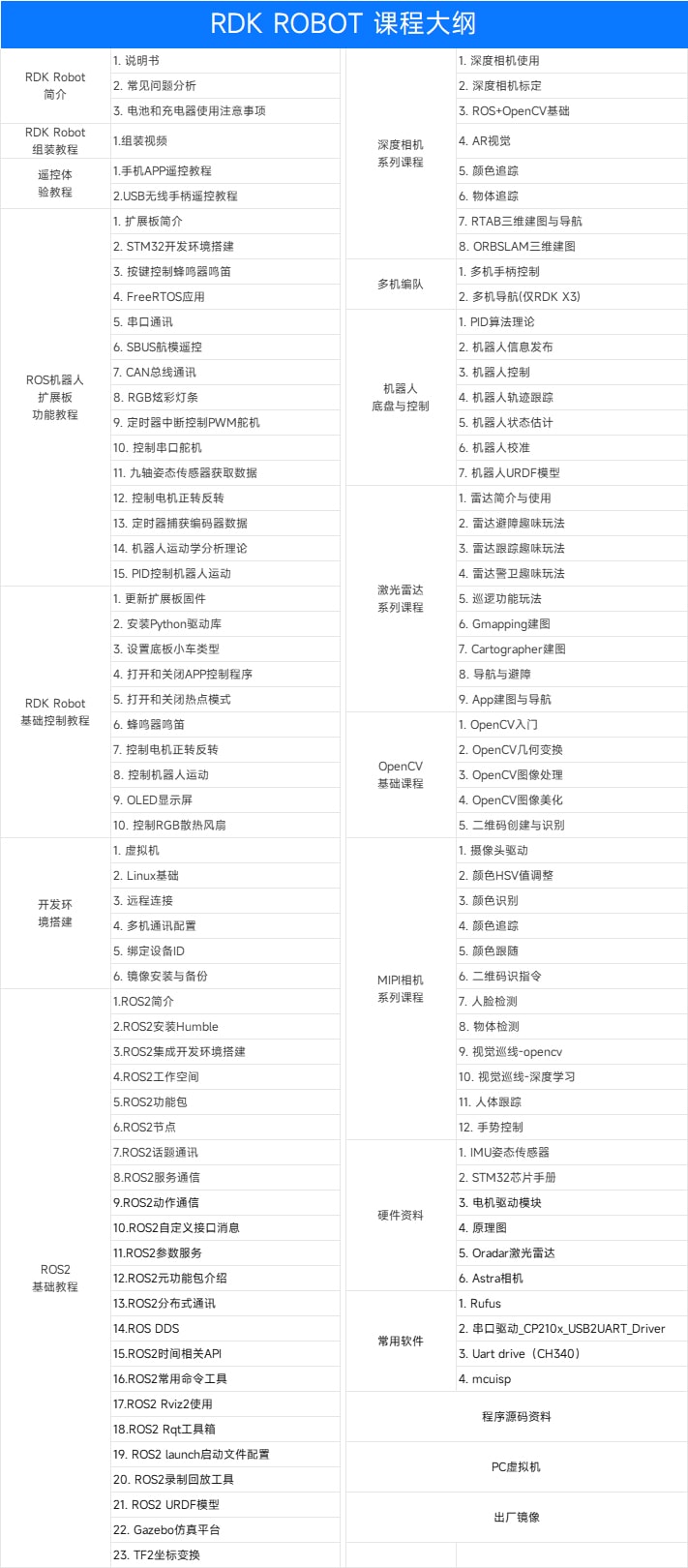
通过ROS,您可以实现机器人小车的高度智能化操控,让机器人小车能够自主完成复杂的任务,提供ROS完整功能的系统教程。
亚博智能配备精心研发的配套课程资料,提供基础理论知识与实操案例教程,内容由浅入深,方便用户快速上手学习。
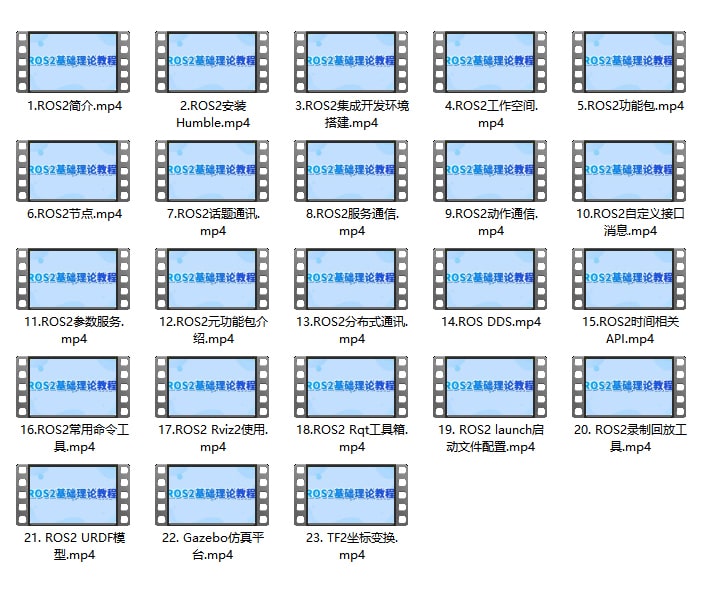
原创中英文视频教程,资深工程师手把手带您玩转RDK ROBOT。
提供源码解析,同时配备资深ROS工程师手把手带您玩转RDK ROBOT。