STM32平衡小车 V2.0
2mm厚度金属板,表面烤漆磨砂处理,配备大功率带AB相编码器减速电机。
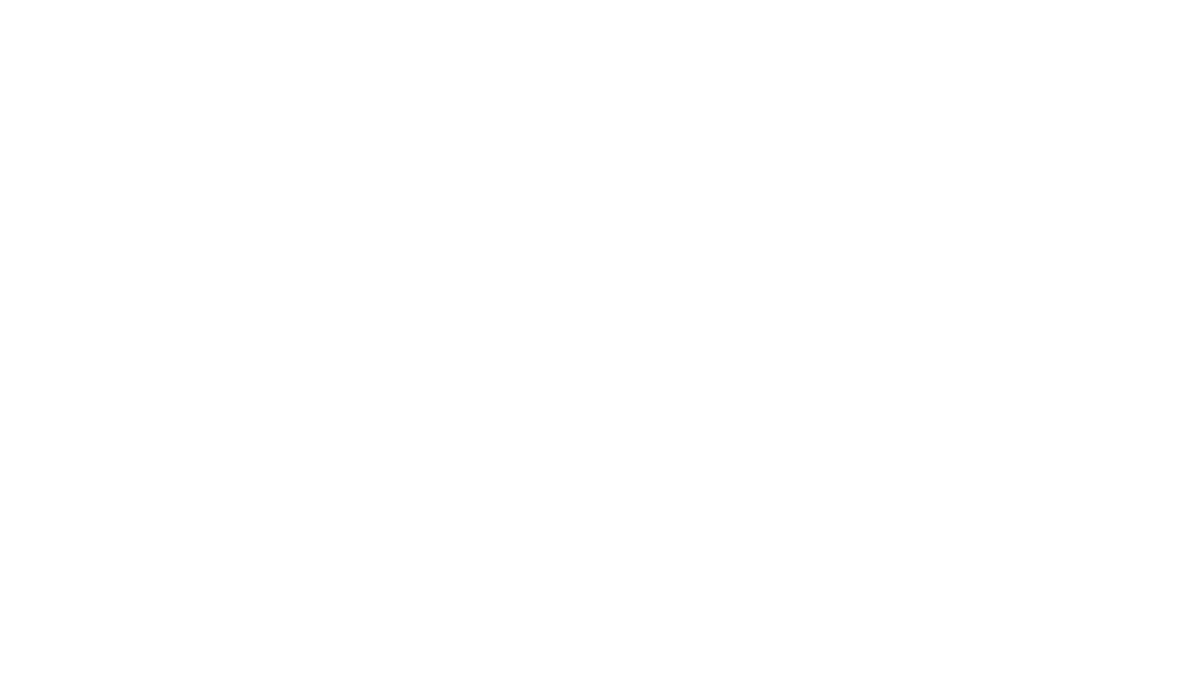
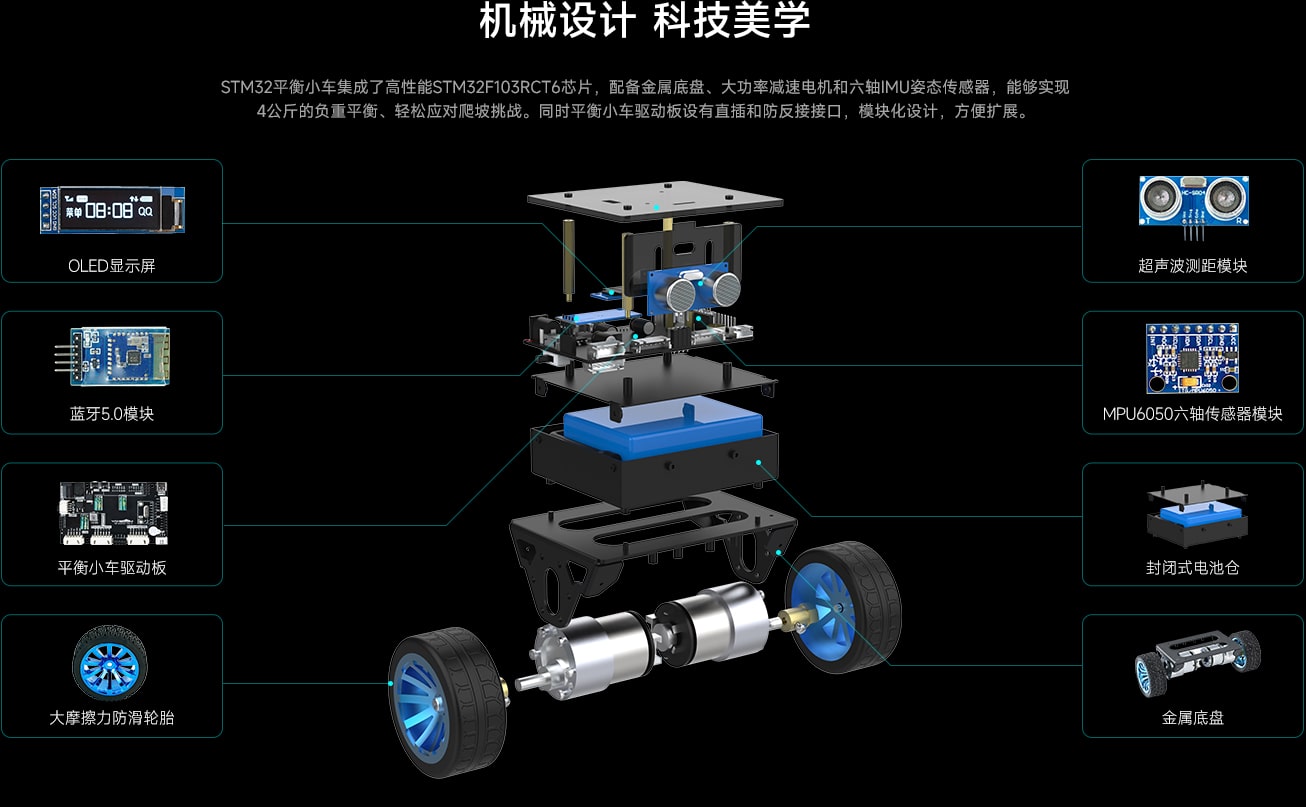
平衡小车驱动板设有直插和防反接接口,模块可直接插入或用防反接排线连接。拒绝高度集成的成品化设计,采用简单明了的模块化设计,更适合平衡小车初学者学习。
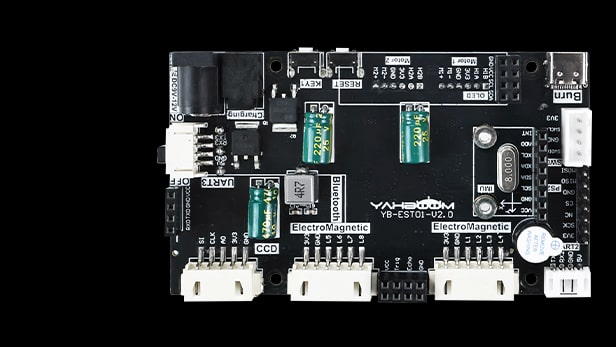
常用蓝牙模块,轻松实现与手机配对,手机通过APP程序即可遥控自如,完成前后左右、急停、旋转等动作。
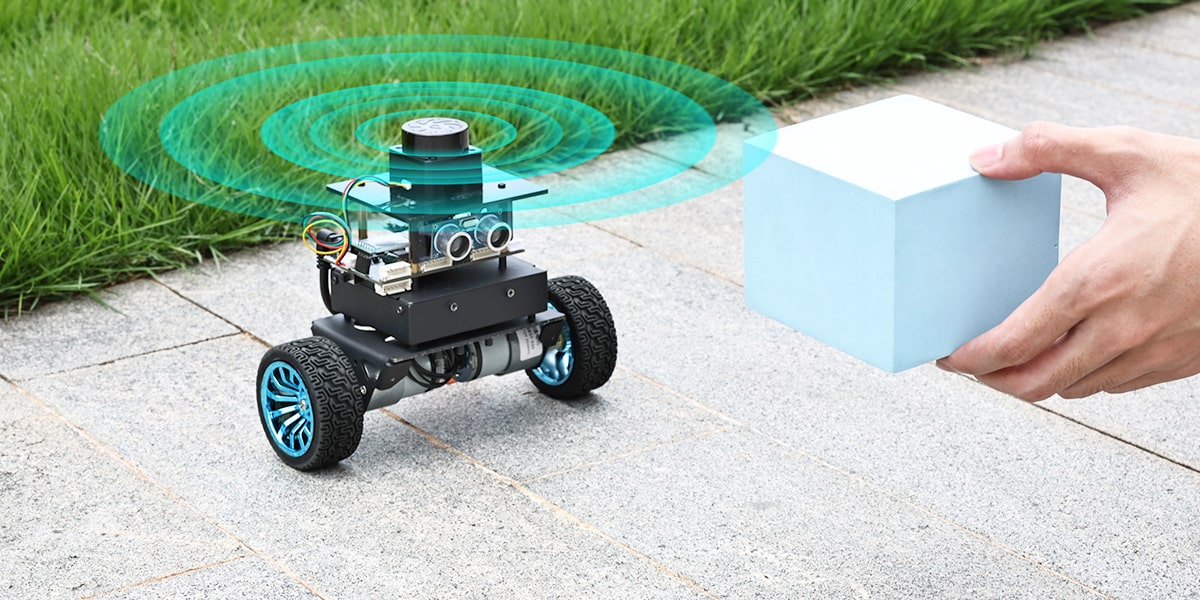
常用于超声波测距,在平衡小车上作为避障传感器,拥有高精度、小盲区的特点。
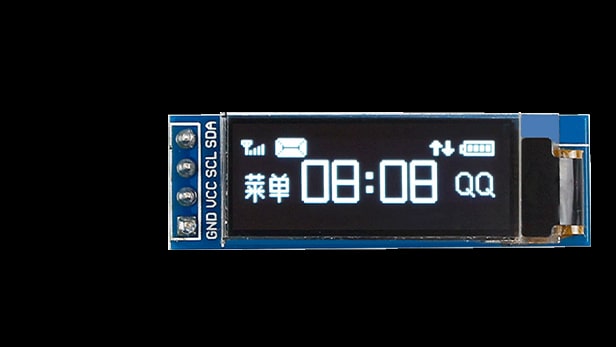
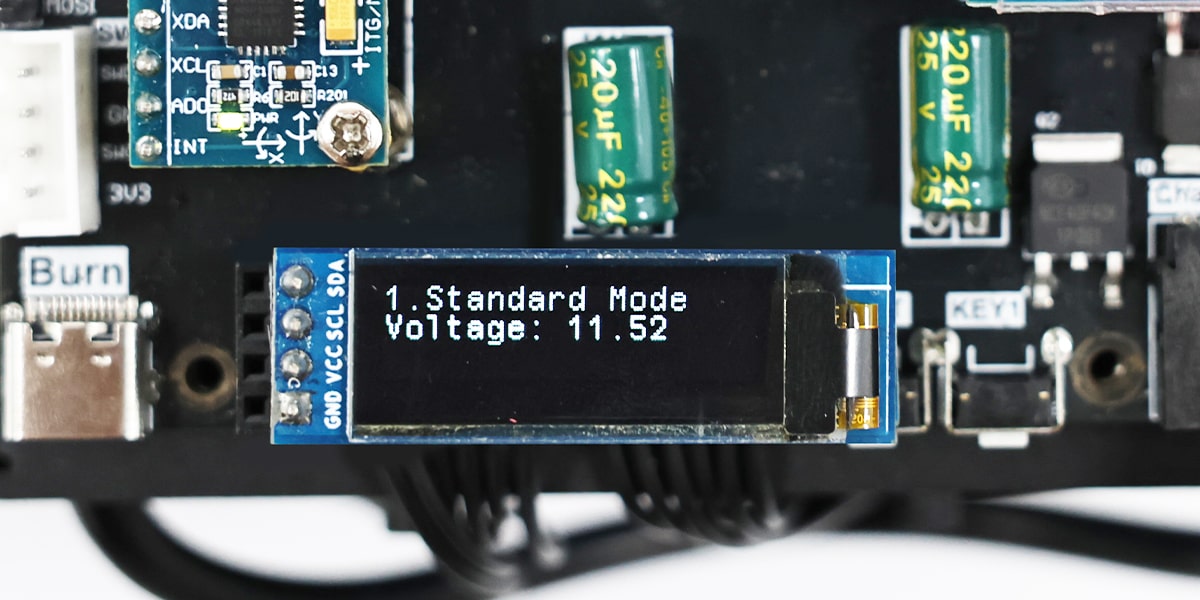
标配OLED显示屏,可以非常方便快捷的观察小车的数据,并实时进行调试。
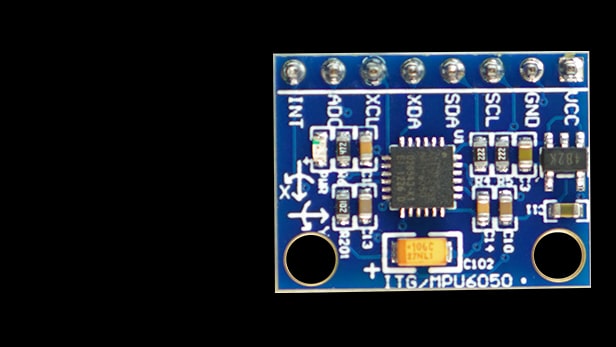
工业级别整合性6轴运动处理组件,常用于可穿戴设备智能手机上。平衡车的平衡参数全靠它。
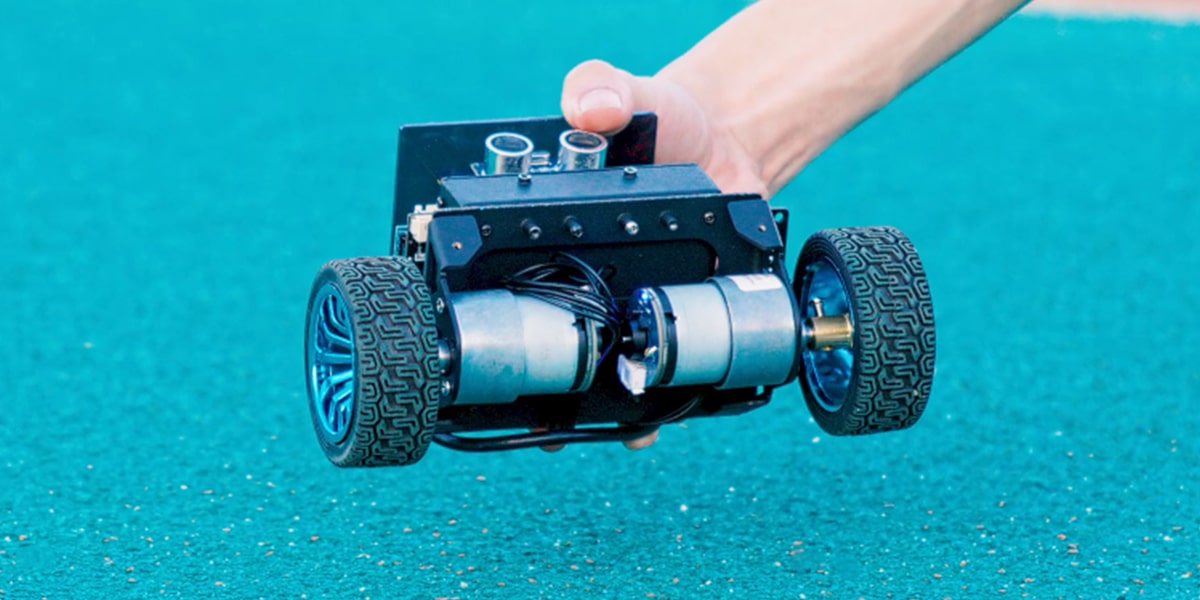
借助高性能六轴IMU,小车能够检测到放置在地面的动作,并自动启动平衡系统。而当小车处于直立状态并被垂直提起时,会通过六轴IMU识别这一动作,并自动关闭平衡系统。
平衡车采用三层结构设计,上层平台可随意载物/DIY拓展。搭配1:30减速比大扭矩编码器电机,可实现负载重量高达4KG,超越自重4倍,负重同时仍可以进行遥控。
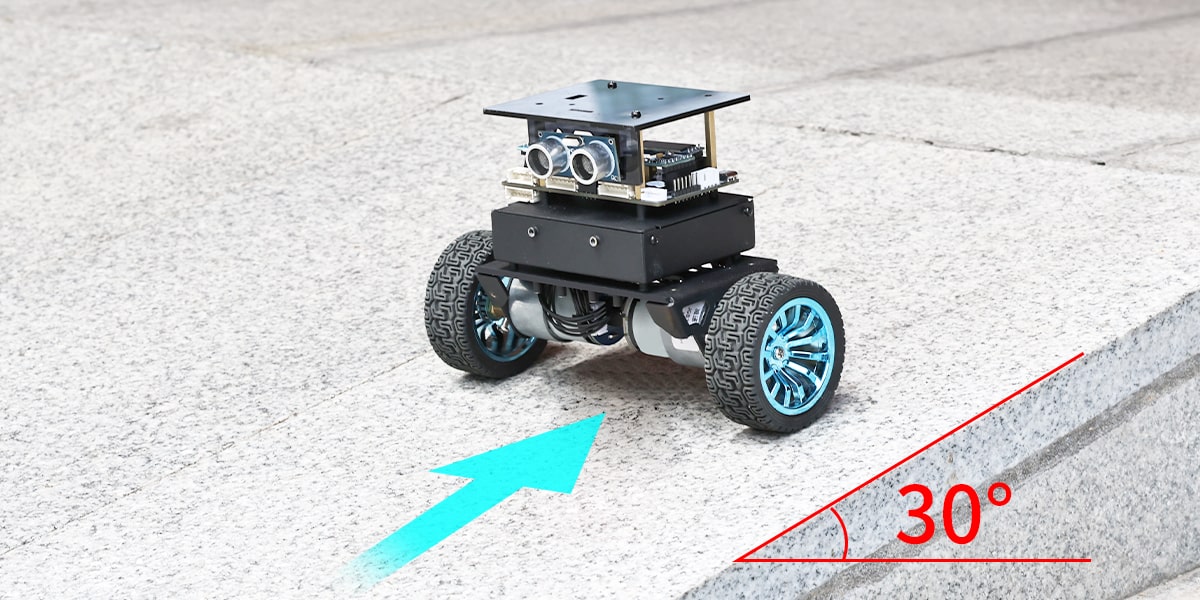
凭借卓越的平衡能力和强劲的动力系统,平衡车能够轻松克服30°左右的坡度挑战,确保行驶过程中的平稳与安全。
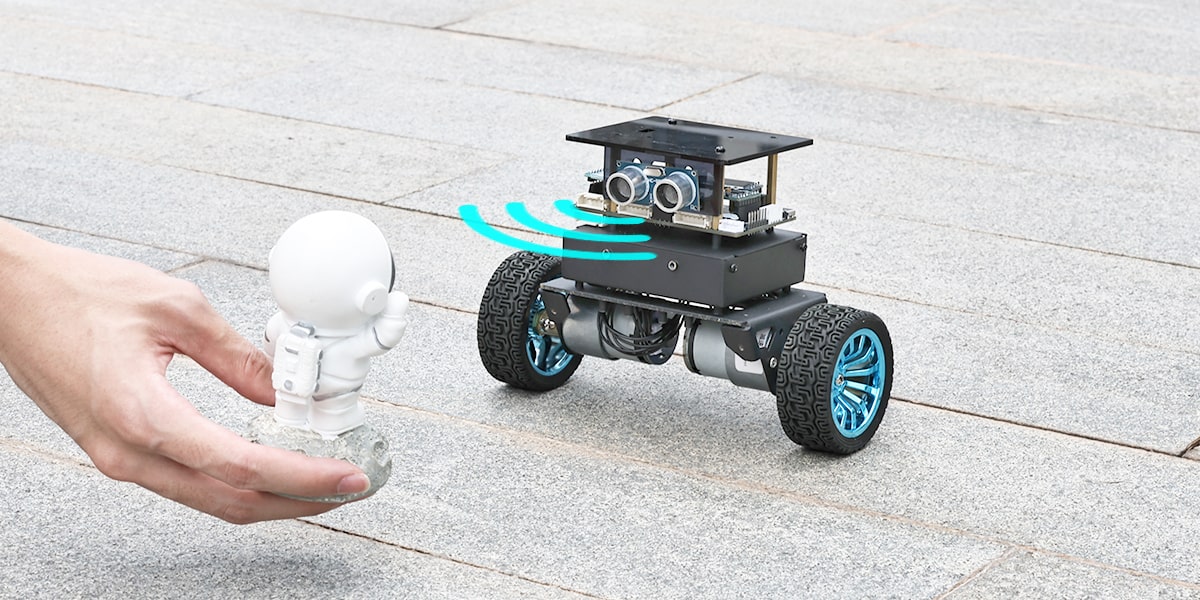
小车具备超声波避障和跟随功能,可以在两者间自由切换,避障模式下,小车可以躲避前方障碍物。跟随模式下,小车可以跟随前方的指引物。
配备OLED显示屏,支持显示平衡车当前模式、小车电压,随时掌握小车实时状态。
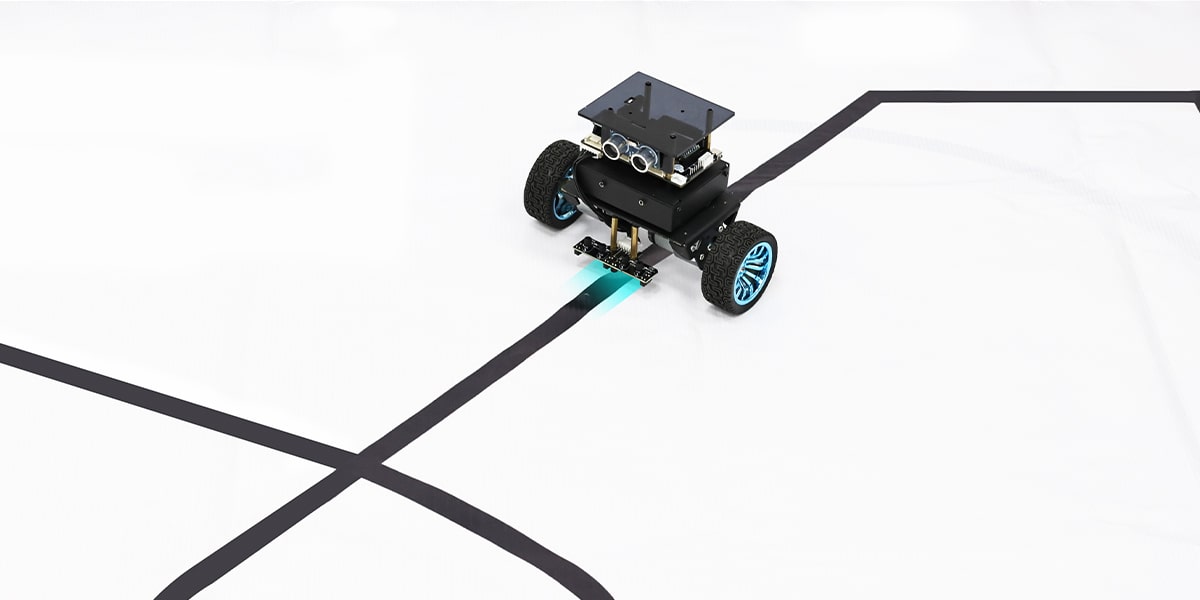
可实现1.6~2cm宽度的黑线循迹,支持直角转弯、交叉路段等高难度巡线,甚至可以超锐角掉头。
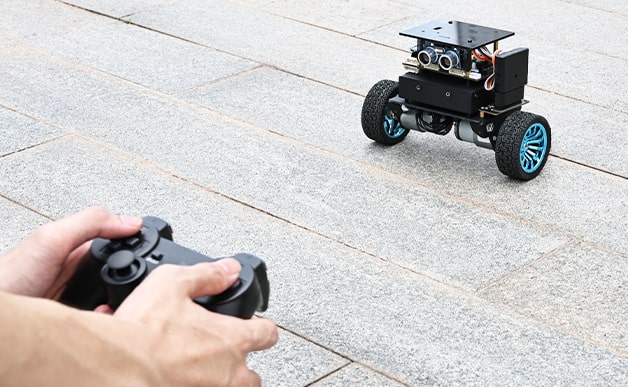
可通过2.4G无线手柄对平衡车进行遥控,控制平衡车前进、后退、左右转,还可以进行速度控制。
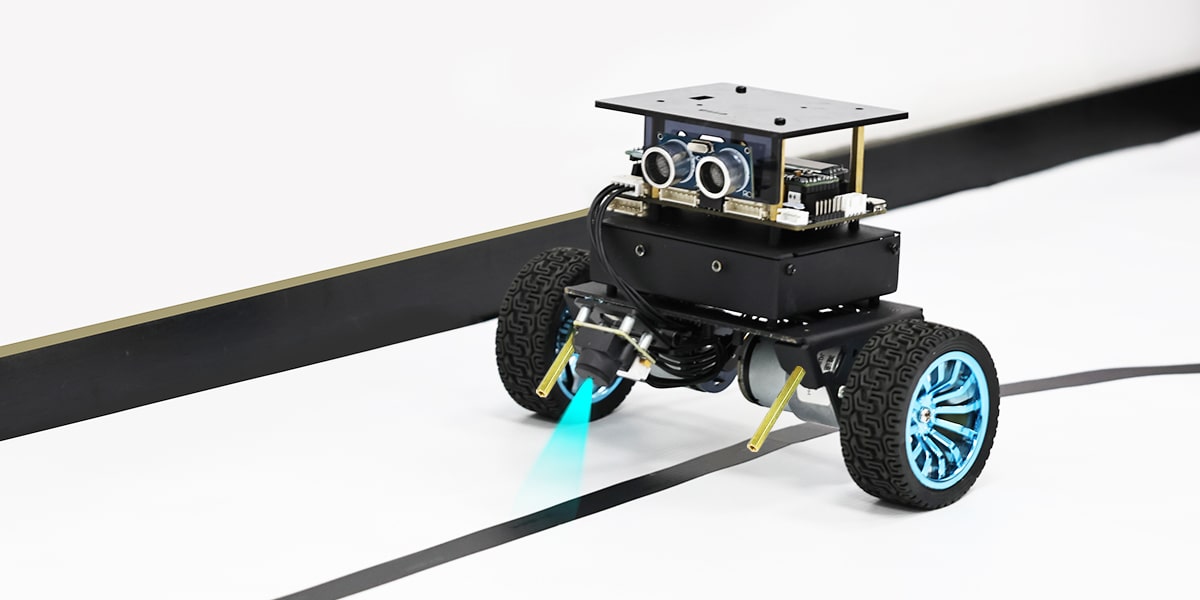
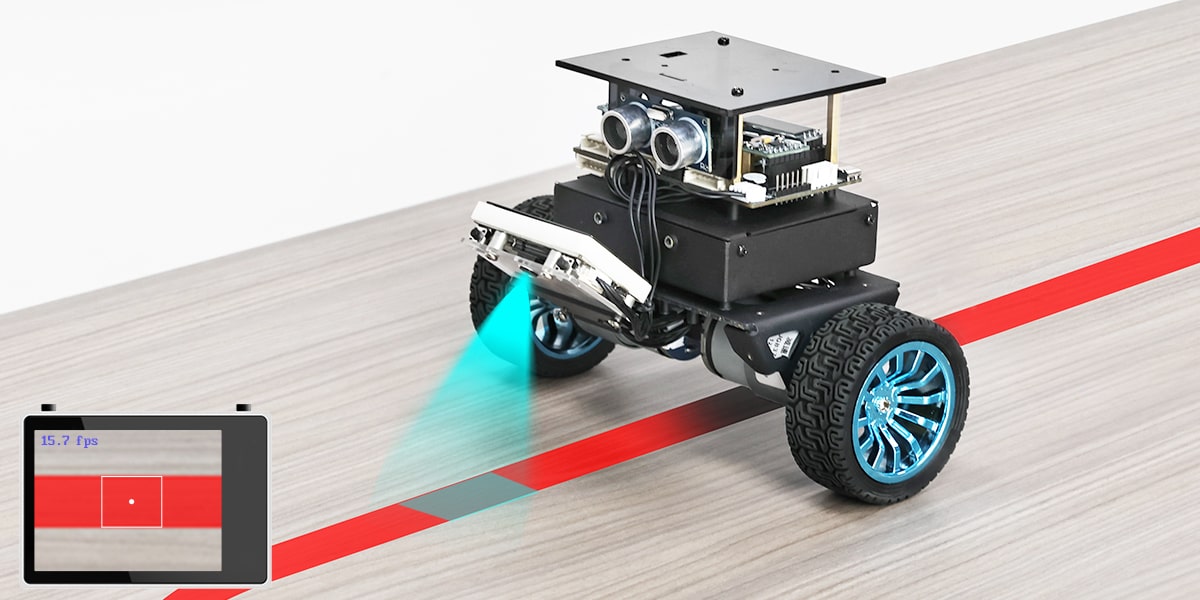
可通过CCD摄像头获取图像,根据图像像素灰度值检测黑线实现CCD视觉巡线功能,OLED屏幕可实时显示巡线状态。
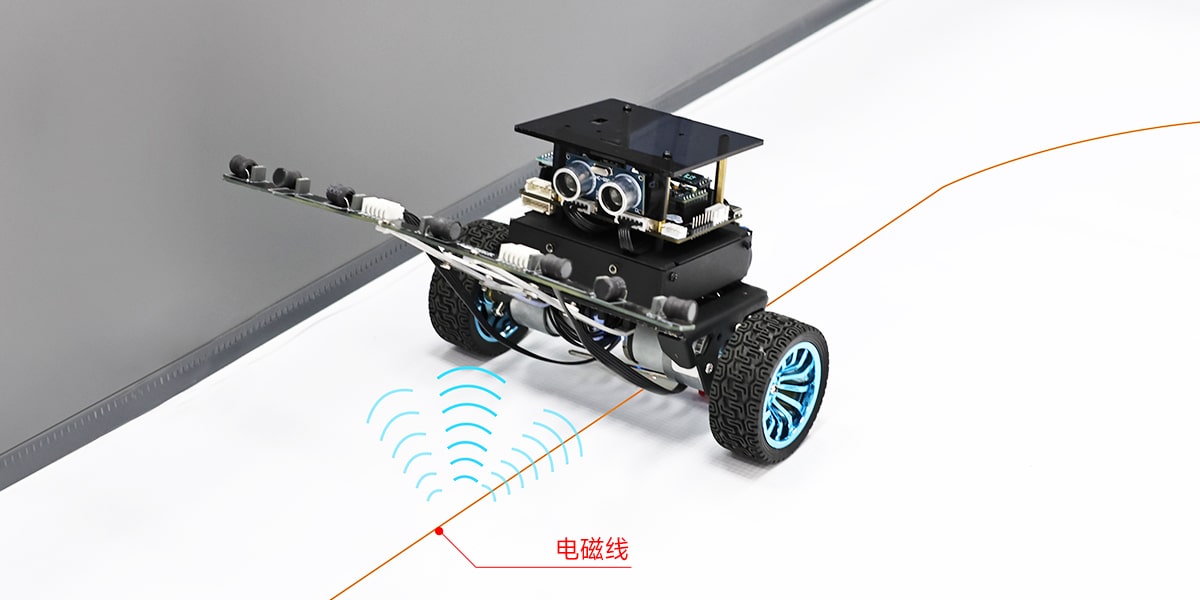
平衡车可通过电磁模块快速感应并追踪电磁信号,实现高速电磁巡线,相比红外和CCD摄像头巡线,电磁巡线的速度更快。
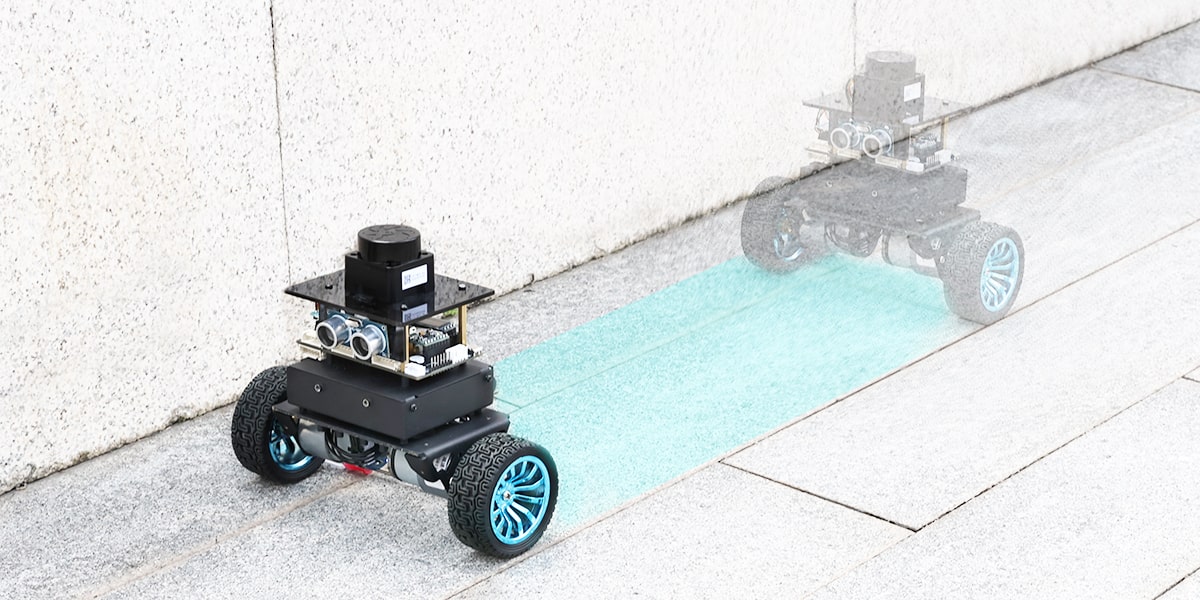
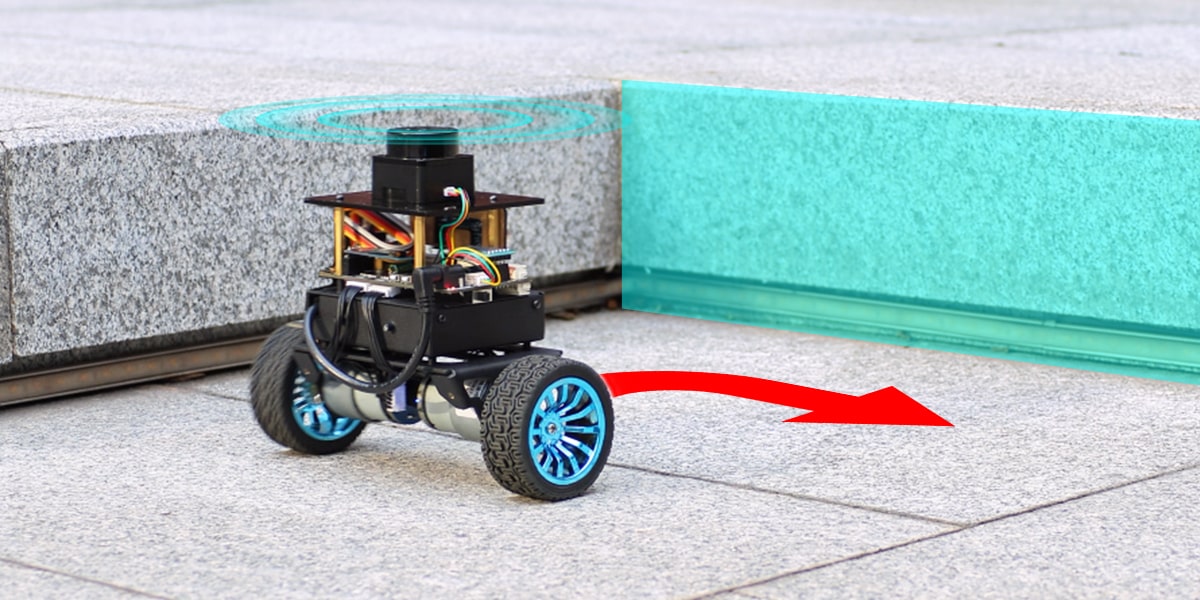
雷达与墙面保持一定距离,沿墙面直线行驶,若遇到拐角将转弯90°继续沿墙面行驶。
平衡车通过雷达检测周围最近的目标,控制平衡车正面始终朝向此目标。
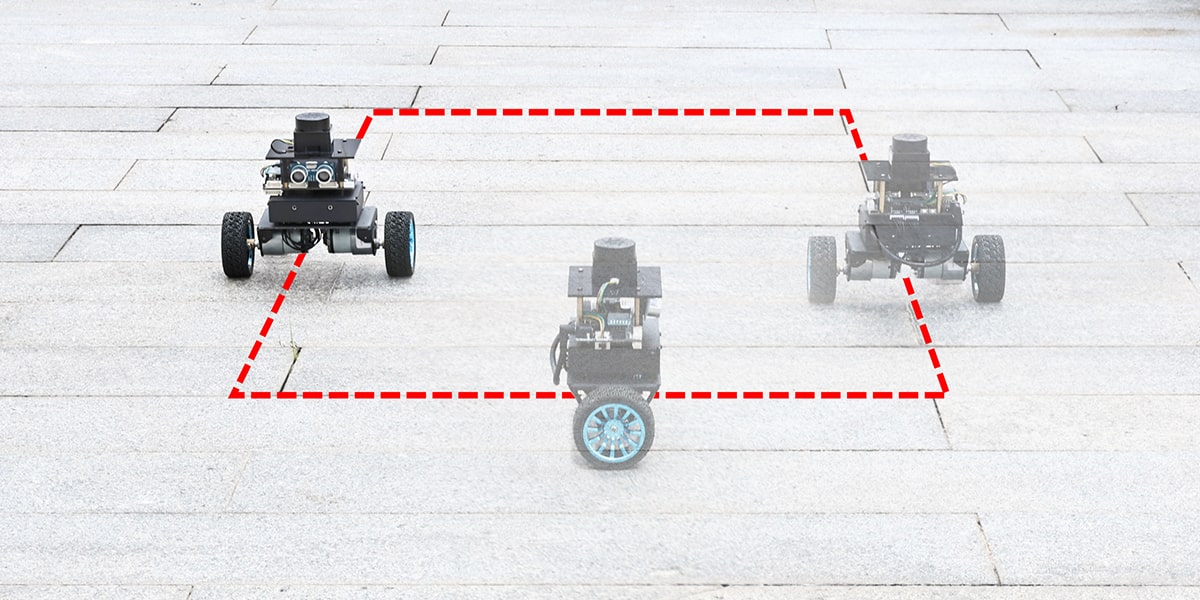
平衡车沿指定路线巡逻,当雷达检测到障碍物时,车辆停止并触发蜂鸣器报警。
平衡车通过雷达对环境进行扫描检测,选择距离近的目标进行跟随移动。
平衡车通过雷达实时检测周围环境,在前进中避开障碍物。
K210视觉模块识别颜色线条,通过串口传给平衡车,平衡车获取到线条的位置和方向,可实现视觉巡线功能。
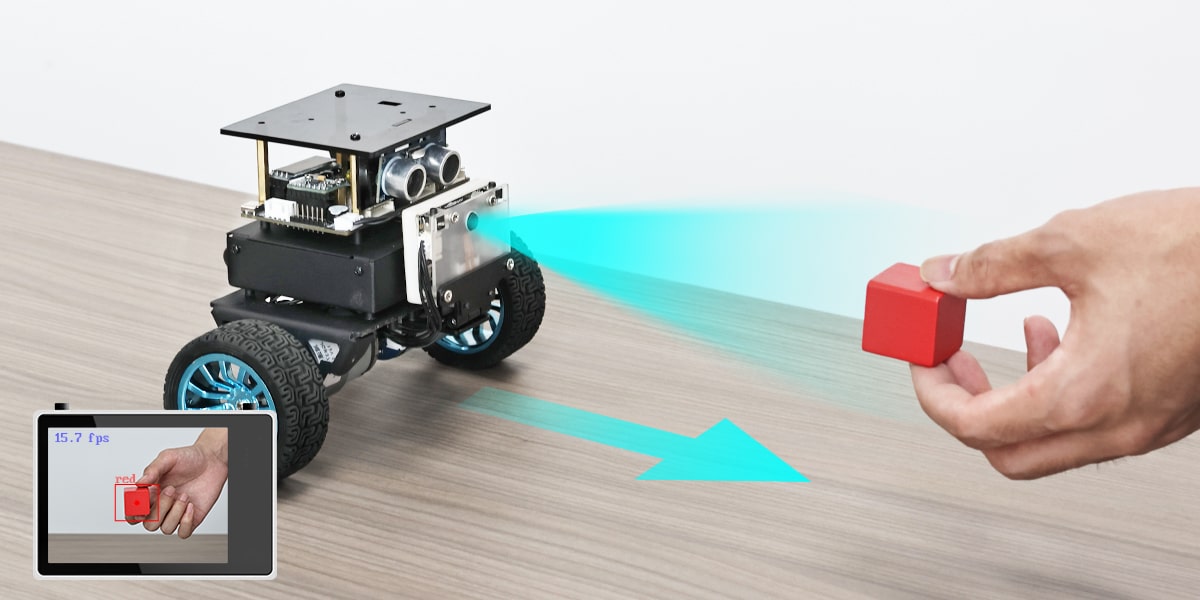
K210视觉模块识别色块颜色,通过串口传给平衡车,平衡车根据色块的位置和大小进行跟踪。
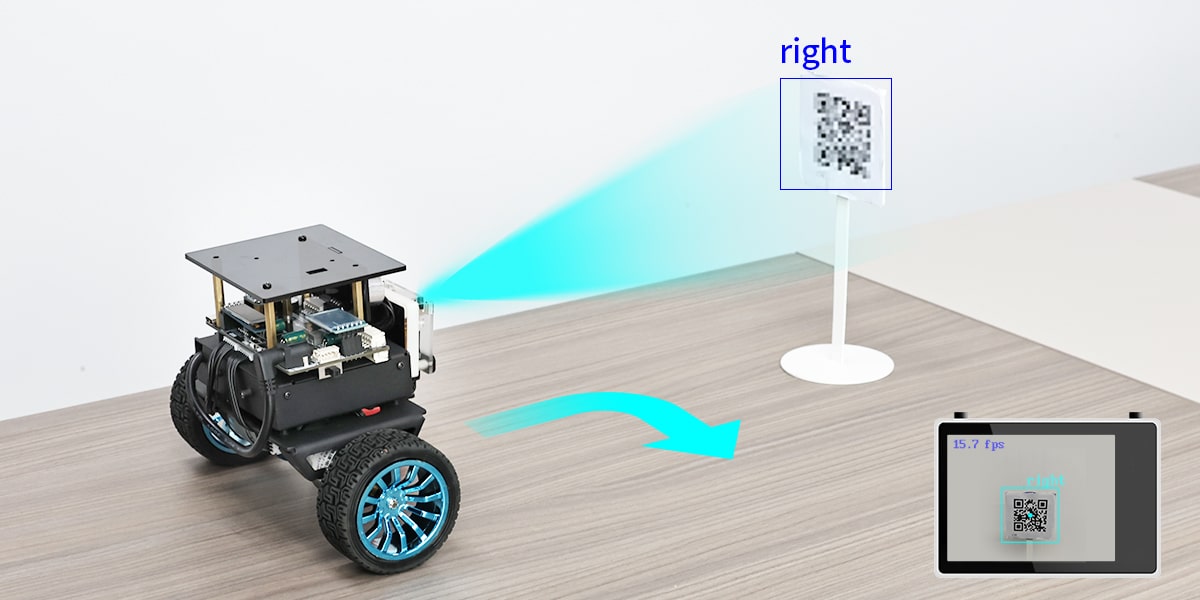
K210视觉模块识别图码信息,通过串口传给平衡车,平衡车获取图码信息后执行相应动作。
K210拍摄多张同一物体的照片,提取共同特征,学习识别该物体。通过比较当前图像与记录图像的相似度来判断物体类别,并显示类别名称。
k210视觉模块可以识别画面中的手写数字,并显示识别的数字。
提供发烧级安卓版APP,功能丰富,操作度流畅,轻松实现手机遥控小车。
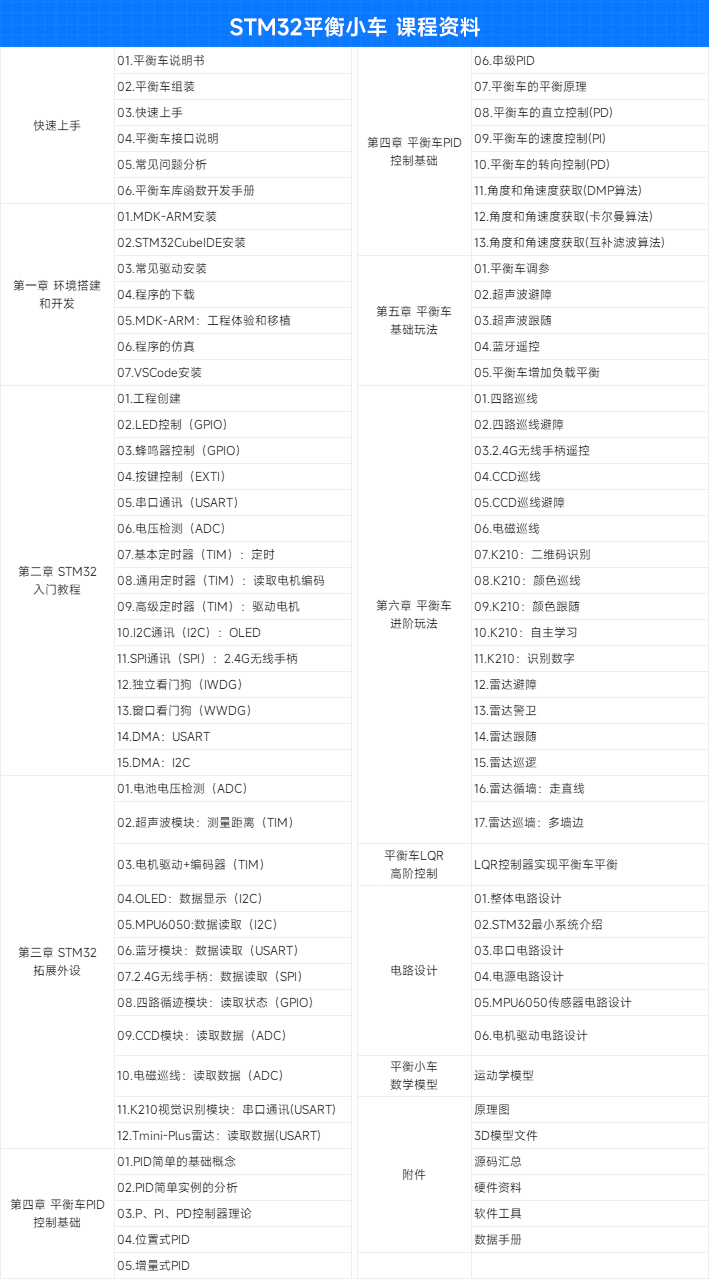
亚博智能配备精心研发的配套课程资料,提供基础理论知识与实操案例教程,内容由浅入深,方便用户快速上手学习。
程序代码开源,让技术更自由,让创新更简单。
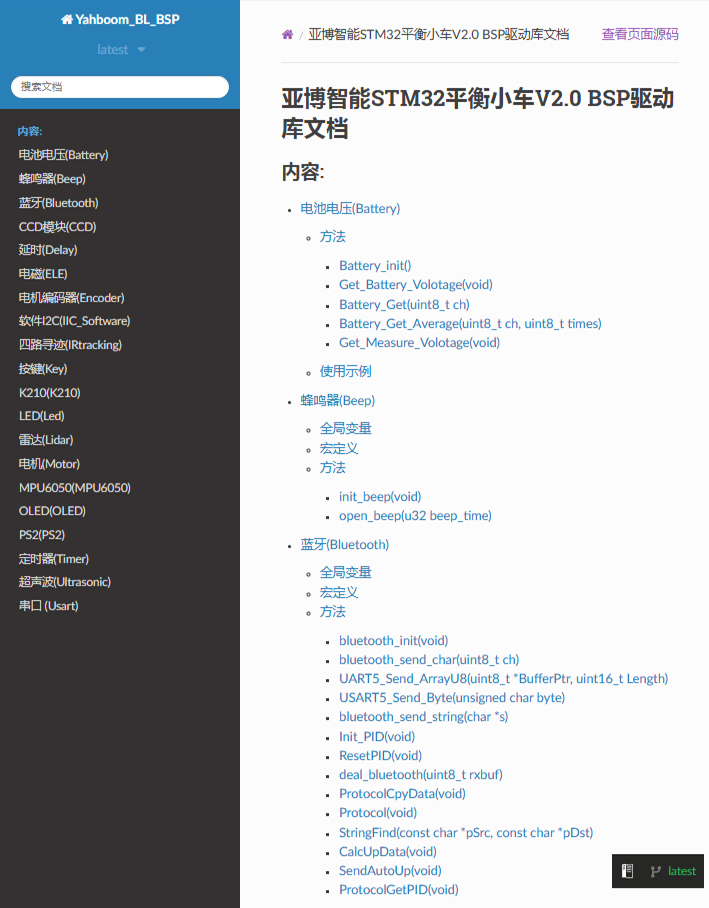
提供详细的平衡车V2库函数开发手册,包含详细的代码解释和使用说明,新手小白可以通过查阅手册轻松理解代码功能,加快学习和开发速度,迅速掌握编程技巧。
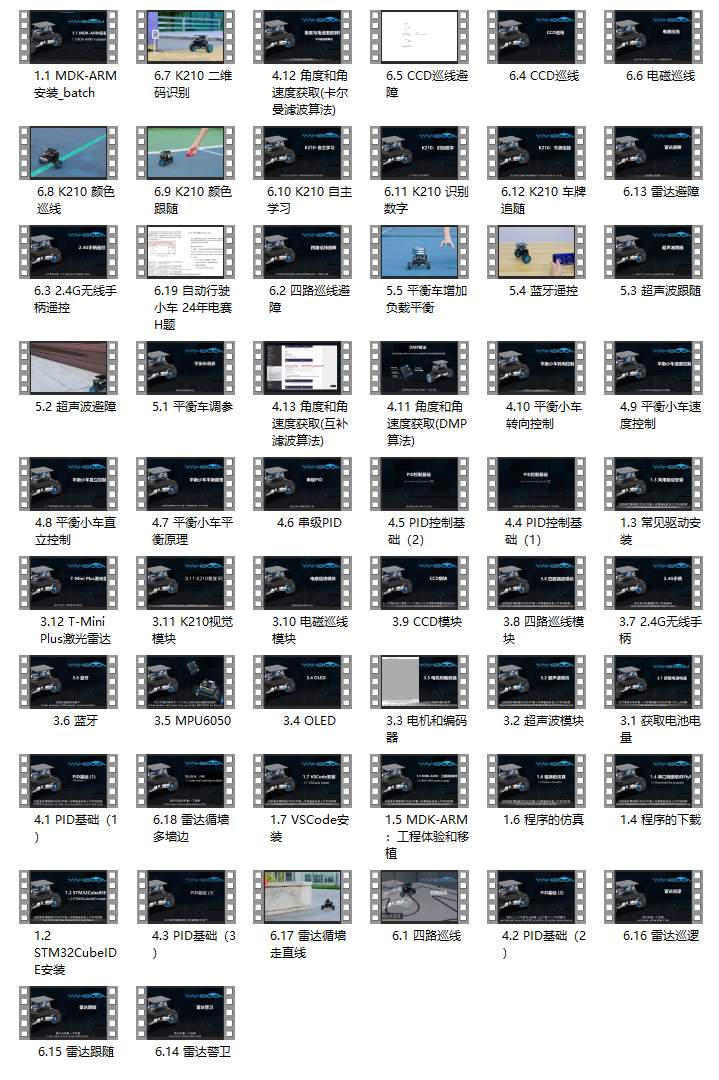
亚博智能精心打造代码级视频教程,视频包含原理讲解、代码讲解、实操演示及实验现象,助力开发者轻松掌握平衡车开发技术。