 1.myBlockly是什么
2.myBlockly使用前的准备工作
3.myblockly下载安装
4.myBlockly界面展示及基础功能的使用
5.控制RGB灯板
6.控制机械臂回到原点
7.控制单关节运动
8.控制多关节运动
9.自适应夹爪的使用
10.力控夹爪的使用
1.myBlockly是什么
2.myBlockly使用前的准备工作
3.myblockly下载安装
4.myBlockly界面展示及基础功能的使用
5.控制RGB灯板
6.控制机械臂回到原点
7.控制单关节运动
8.控制多关节运动
9.自适应夹爪的使用
10.力控夹爪的使用  11.Q&A
12.API积木块详解
11.Q&A
12.API积木块详解
答: 机械臂的夹爪控制不了是因为没有设置模式的接口,目前暂不支持直接通过C++对夹爪的控制。
答: 使用debug模式应该是不行的,提供的库是使用release编译的 。
答:进入QT的安装目录下,例如我安装的软件位置是C盘,我可以进入C:\Qt\Qt5.12.10\5.12.10\msvc2017_64\bin文件夹下找到这两个文件,将这两个文件复制到C:\Windows\System32文件夹下,然后重新运行。
答:可以连接机械臂后,按照图片中的代码运行

答:检查软件是否断开与机械臂的连接,断开连接才可以运行代码。
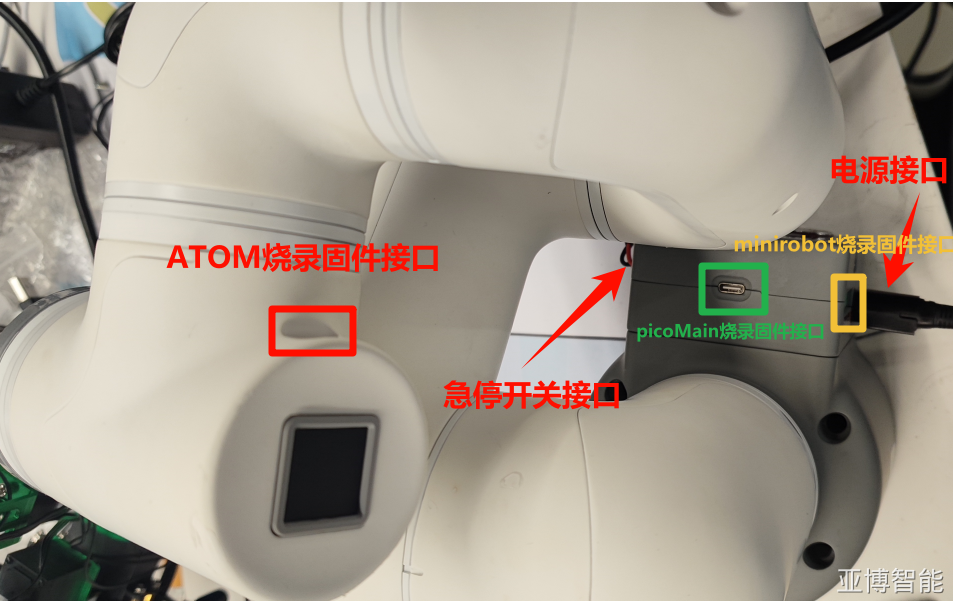
答:机械臂必须连接电源线和急停开关,然后再烧录固件。
Atom 固件:使用Type-C数据线连接电脑和机械臂ATOM接口
M5Stack-Basic固件-minirobot:使用Type-C数据线连接电脑和机械臂minirobot接口
pico固件-picoMain:需要先进入Flash模式,再使用Type-C数据线连接电脑和机械臂picoMain接口,烧录固件
详细的可以看教程,需要注意的是,烧录Atom 固件成功后,没有连接急停开关,机械臂的ATOM会显示NO。