线上课程
产品中心
解决方案
动态分享
线上商城
∨
天猫旗舰店
京东旗舰店
软件下载
∨
控制软件
编程软件
关于我们
×
暂无结果
树莓派5 机器人驱动板
课程资料
资料汇总下载
配套软件下载
百度网盘使用教程
提取码获取
官方商城
搜索
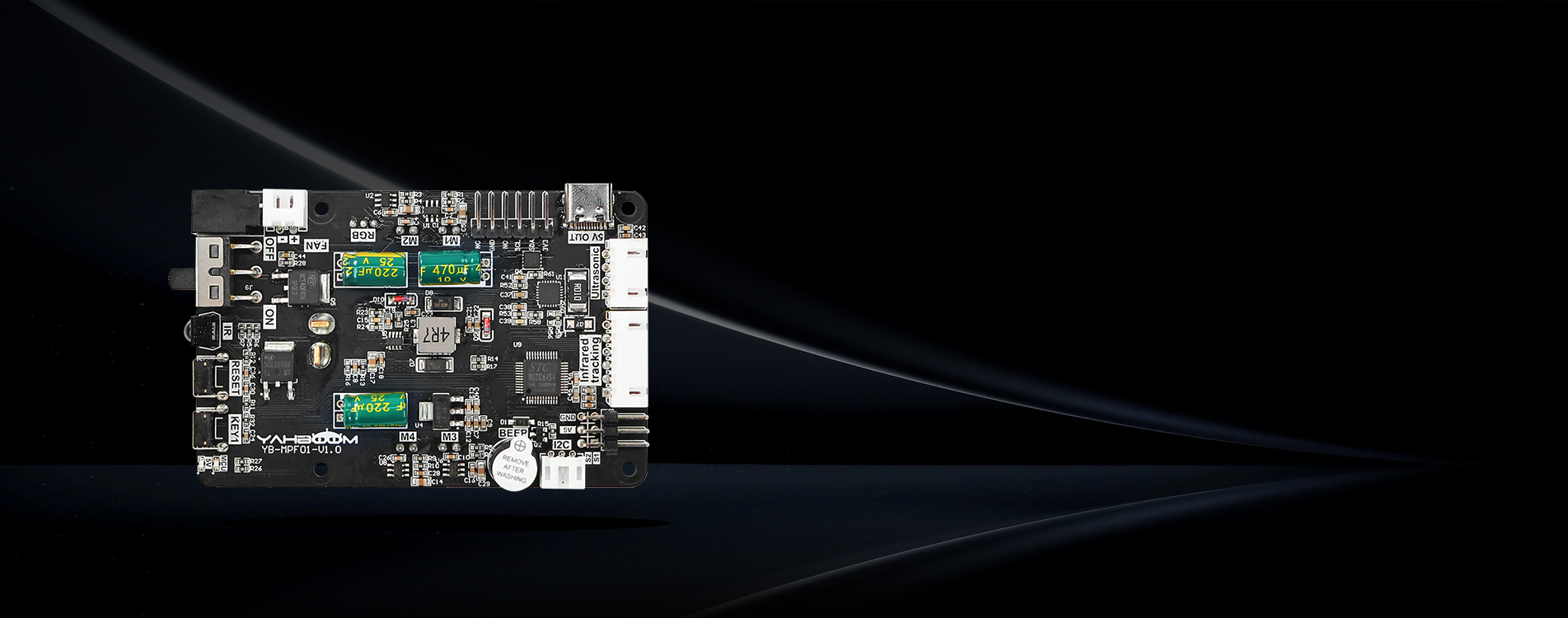
树莓派5 机器人驱动板
•支持树莓派5供电协议
•支持5V/5A输出供电
•支持两路PWM舵机、四路电机接口
•支持扩展多传感器
扩展板简介
1.扩展板接口分布
开发环境搭建
0.树莓派i2c引脚配置
1.安装Raspbot V2驱动库
2.Jupyter Lab环境搭建
3.Jupyter Lab插件安装
4.Jupyter Widgets基本使用
基础外设驱动教程
0.开发前的准备
1.蜂鸣器控制
2.按键读取
3.RGB控制
4.舵机控制(云台控制)
5.电机控制
6.超声波测距打印
7.四路巡线模块状态打印
8.红外遥控键值打印
9.oled打印树莓派状态
电机运动教程
麦克纳姆轮运动方式
0.麦克纳姆轮运动原理
1.小车前后运动
2.小车斜向运动
3.小车平移运动
4.小车旋转运动
5.小车巡逻
普通轮胎差速运动方式
1.小车前后运动
2.小车转弯运动
3.小车旋转运动
驱动板综合玩法
1.小车红外巡线
2.超声波避障
3.超声波跟随
4.红外巡线+超声波避障
5.画地为牢
6.红外遥控小车
下载专区
通讯协议
程序源码汇总
Python驱动库
有问必答
提问:
目录
扩展板简介
开发环境搭建
基础外设驱动教程
电机运动教程
驱动板综合玩法
下载专区
有问必答
 0.树莓派i2c引脚配置
0.树莓派i2c引脚配置 






