进入小车Docker
进入小车Docker1.课程内容2. 基础操作2.1 启动m3pro容器2.2 进入m3pro容器终端2.3 关闭m3pro容器2.4 M3Pro、A1、M1、M3小车的jetson nano版本进入docker容器后出现的问题
1.课程内容
本节课程仅树莓派5主板和Jetson-Nano主板的用户参考
Note
树莓派5 和jetson nano 因系统版本不能直接安装
ros2 humble环境,所以将ros2 humble环境置于Docker中,宿主机没有ros2环境。jetson nano版本进入docker之后需要先打开一个rviz2或者rqt等窗口之后再去运行AI大模型的多模态视觉教程。
2. 基础操作
2.1 启动m3pro容器
如果需要运行教程中的示例程序,必须要先启动
m3pro的Docker容器
Warning
注意一定要再VNC的可视化界面中启动
m3pro的Docker容器,否则可视化的窗口例如rviz等可能无法显示对于外接设备例如:手柄、AI语音模块、等其他硬件设备,
Docker容器只会加载容器启动时已经存在的设备,如果是设备启动后再插入的硬件设备,Docker容器中是无法实时同步的,需要关闭再重启容器重启才会重新加载新插入主板的设备
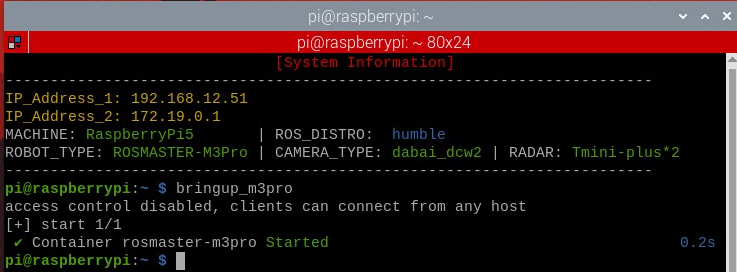
bringup_m3pro
显示container rosmaster-m3pro Started 代表启动成功
2.2 进入m3pro容器终端
后续教程中的指令需要在容器内进行操作,打开容器终端命令:
xxxxxxxxxxexec_m3pro

如果需要退出容器终端,按
ctrl+D

Important
重要
如果没有特殊说明,树莓派和jsetson nano 用户后续在运行程序命令时,都是在m3pro容器中,需要先启动容器,在容器终端中输入命令,后续课程不再赘述。
2.3 关闭m3pro容器
当确实不需要使用m3pro容器,需要手动关闭时(一般无需关闭):
xxxxxxxxxxshut_m3pro

2.4 M3Pro、A1、M1、M3小车的jetson nano版本进入docker容器后出现的问题
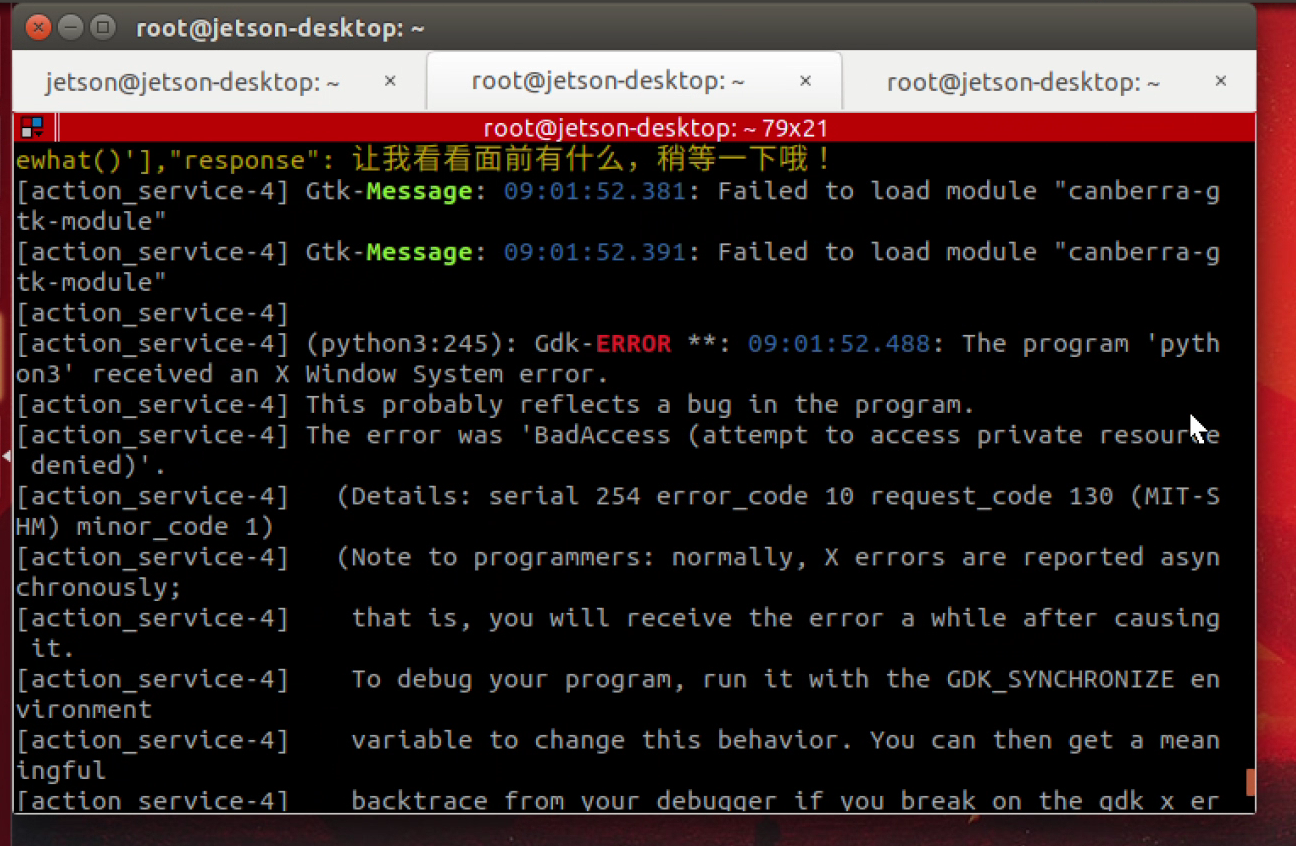
当jetson nano版本进入docker容器后直接运行AI大模型视觉案例报权限不足,如下图报错。
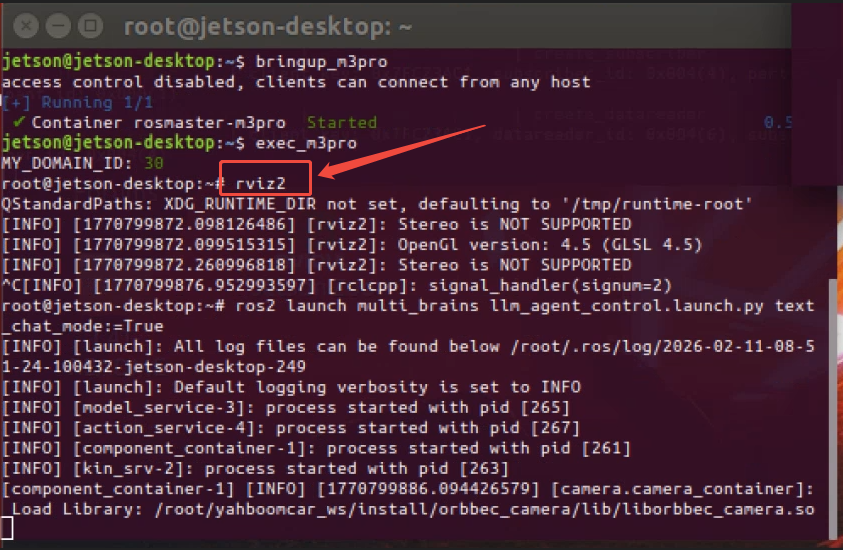
解决方法:可以先在docker容器里通过rviz2或rqt等指令打开一个窗口然后再把窗口关闭之后再去运行AI大模型视觉案例,如下图。