1、调整深度相机深度识别效果
本节课程说明如何在windows上位机和ros2的环境下调整识别效果。
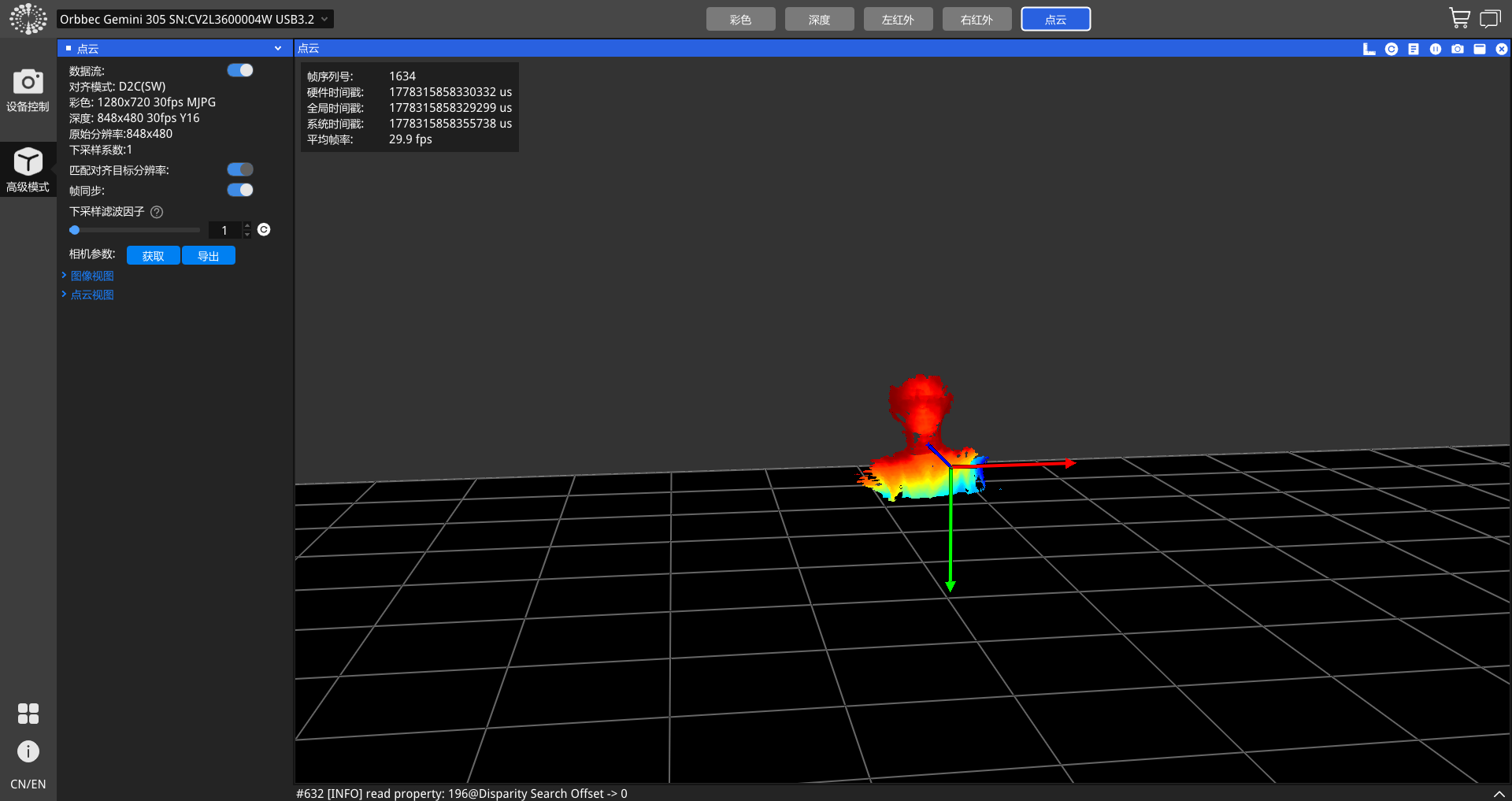
1、OrbbecViewer上位机
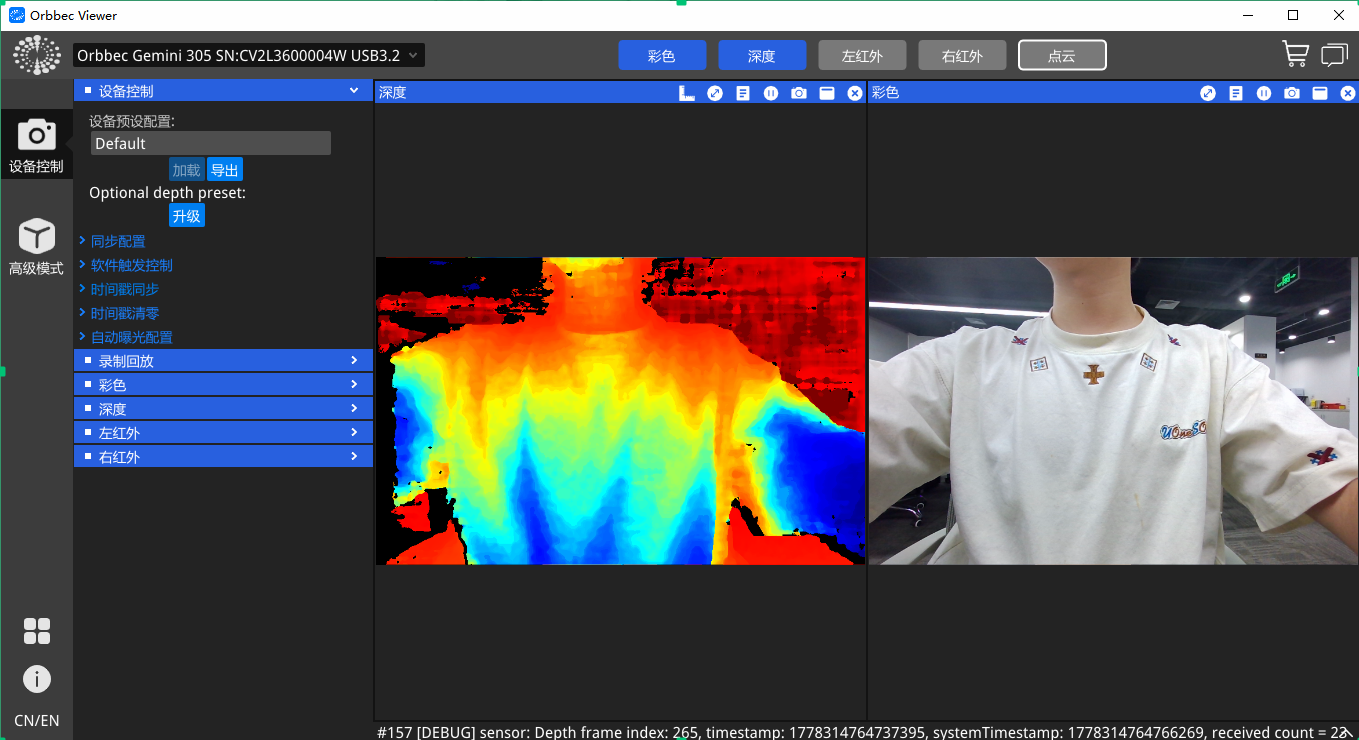
识别效果一般:
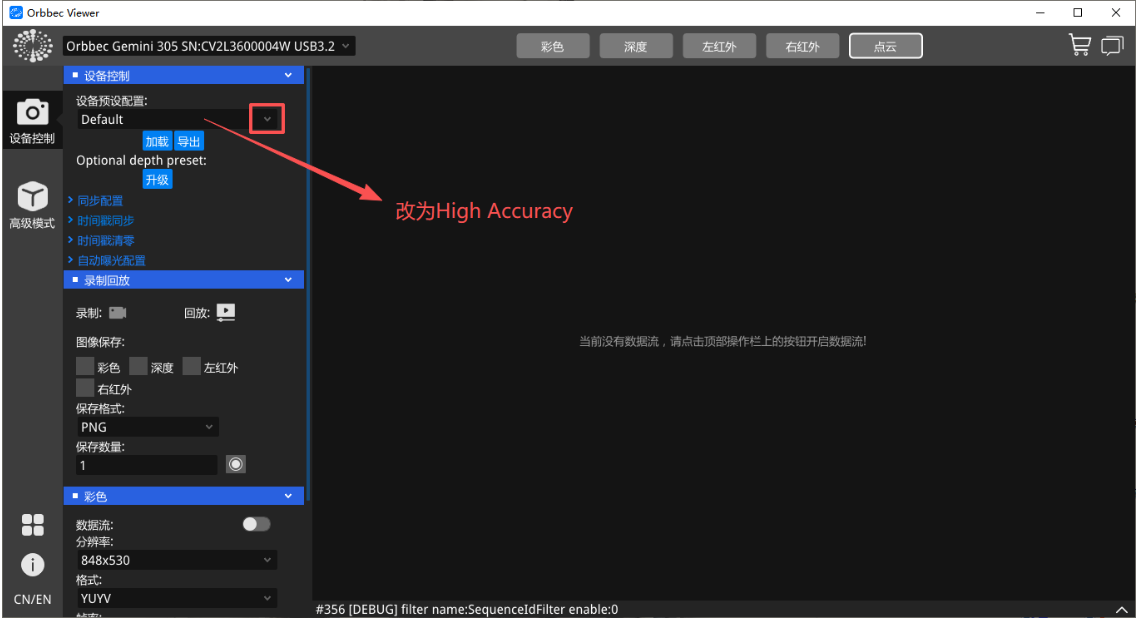
先关闭所有的数据流,设备控制中的设备预设配置将Default改为High Accuracy
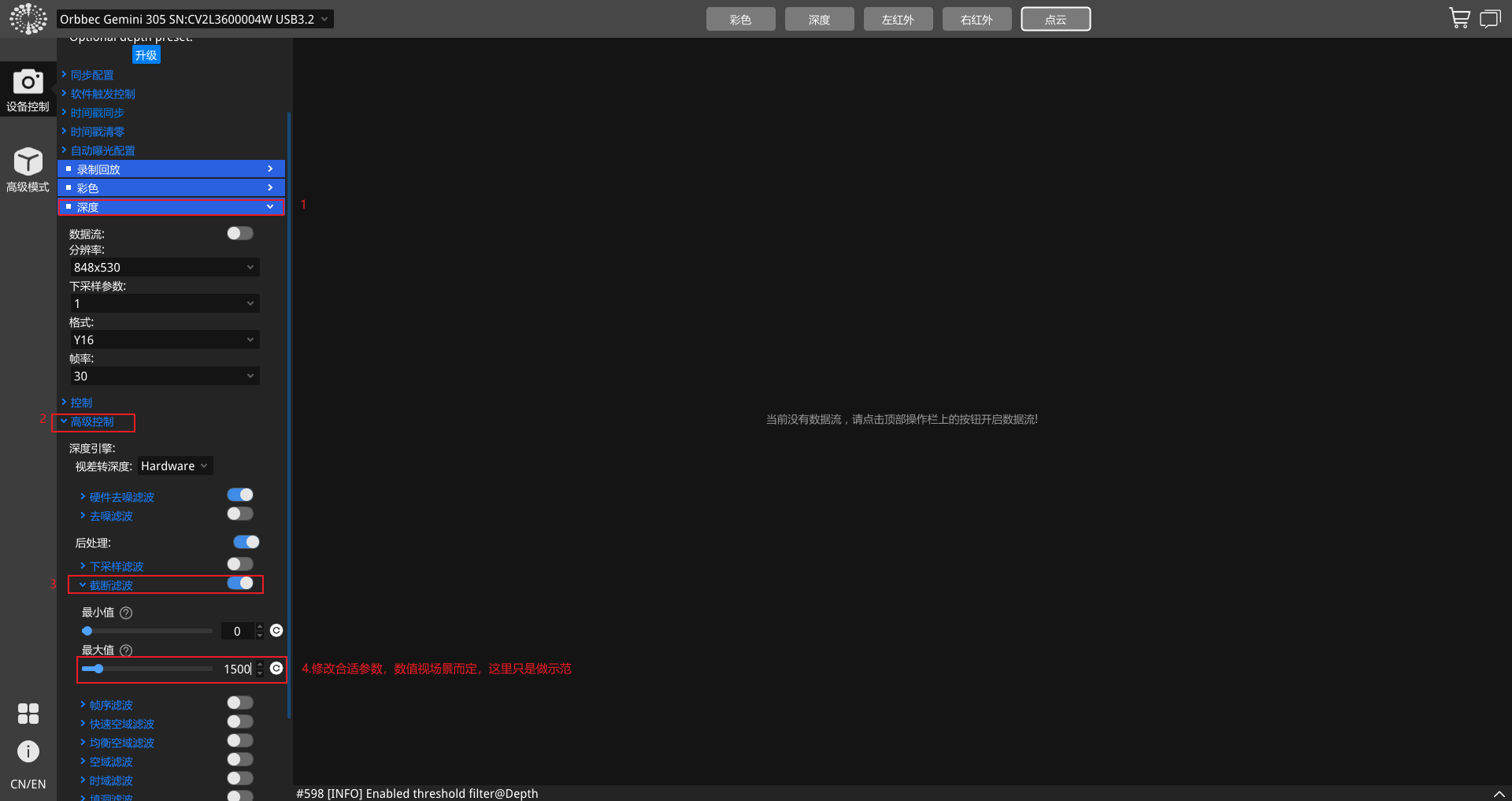
然后找到深度,下拉选择高级控制,在里面找到截断滤波,开启后调整下面最大值的数值,这里的数值视情况而定,这里只是演示用。
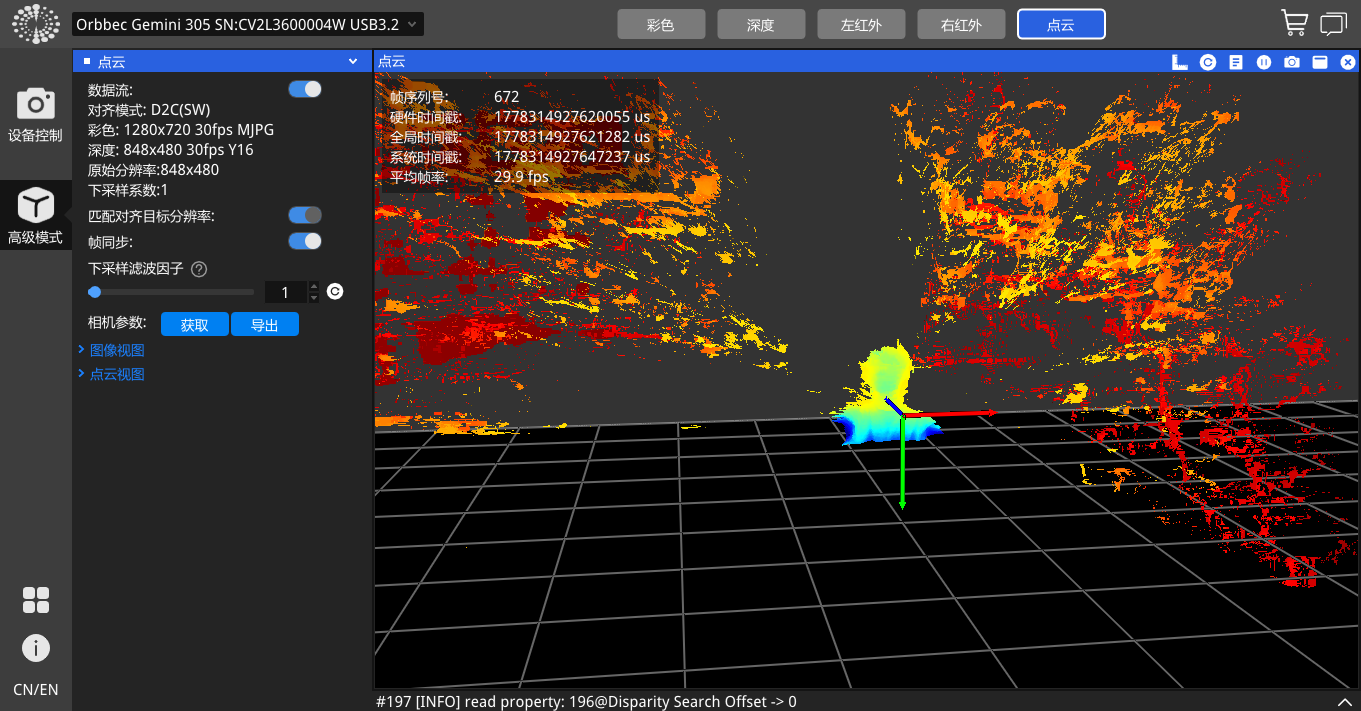
重新开启数据流,可以看到修改后的效果

2、虚拟机下的修改,以ROS2为例
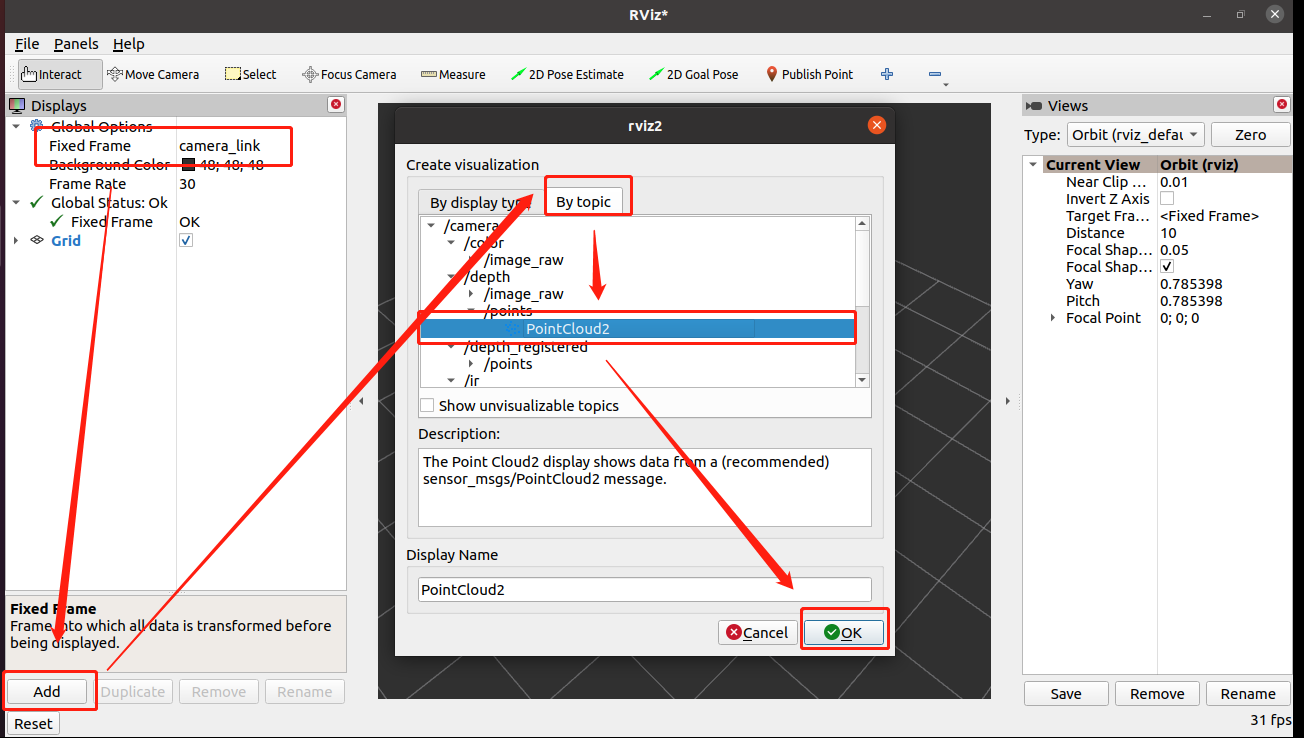
#gemini305相机启动ros2 launch orbbec_camera gemini305.launch.py新开一个终端输入指令打开rviz:
xxxxxxxxxxrviz2
效果一般:
xcd ~/orbbec_305gedit src/OrbbecSDK_ROS2-2-main/orbbec_camera/launch/gemini305.launch.py
搜索device_preset、threshold_filter,将里面的默认值修改一下:

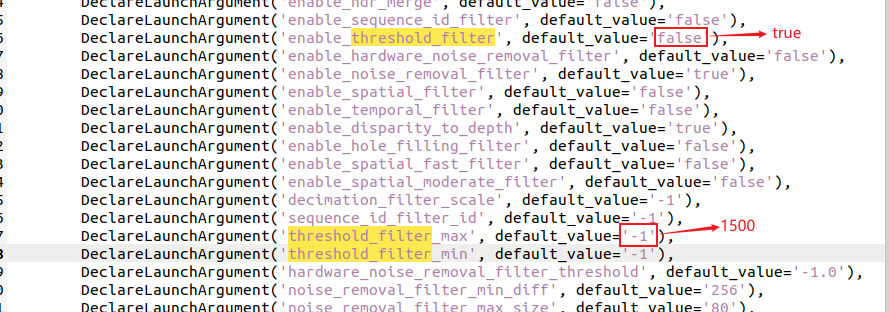
ctrl+s保存后退出,输入编译指令
xxxxxxxxxxcolcon build
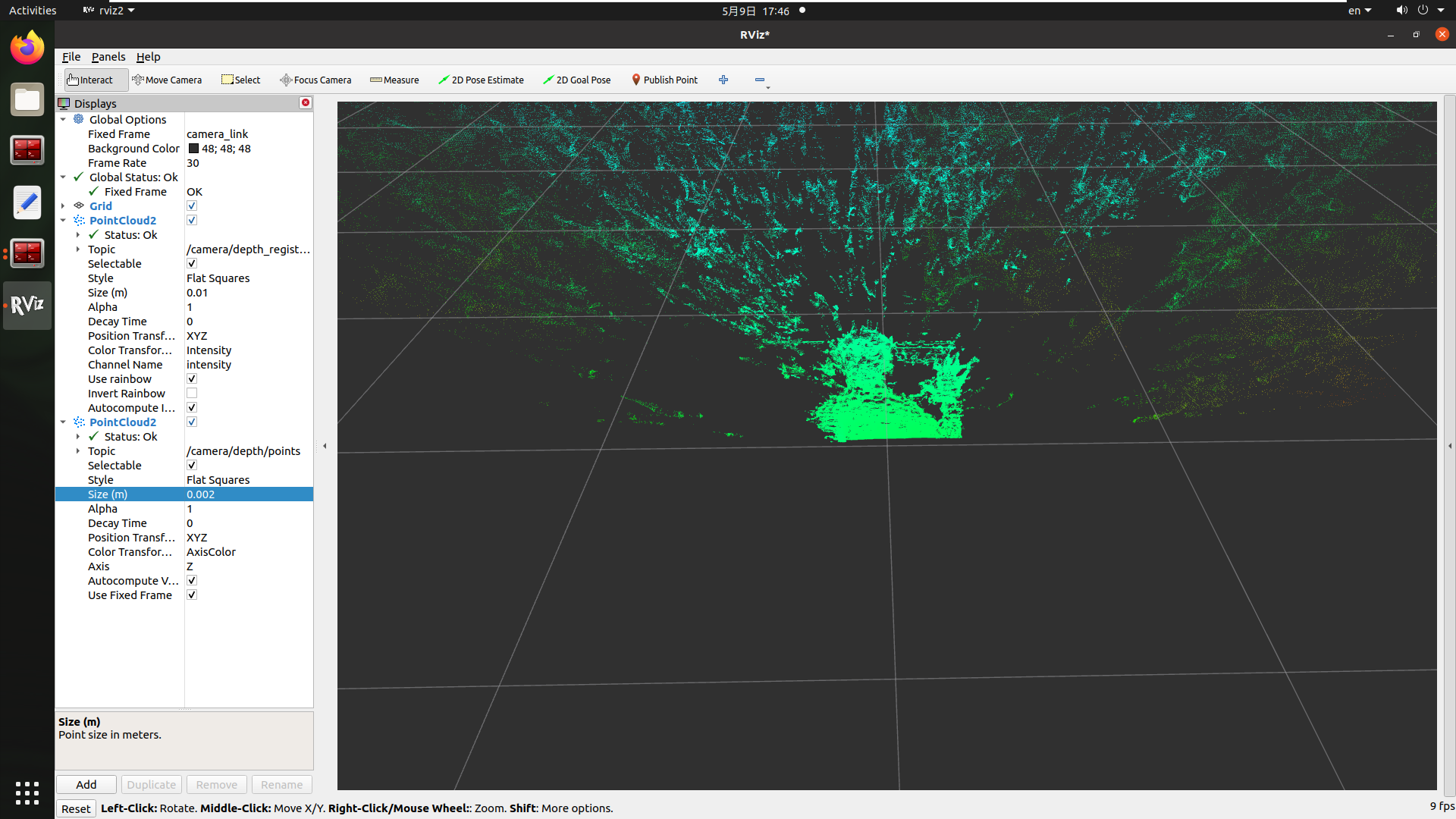
再次打开rviz2,选择点云,可以看到效果改善了:
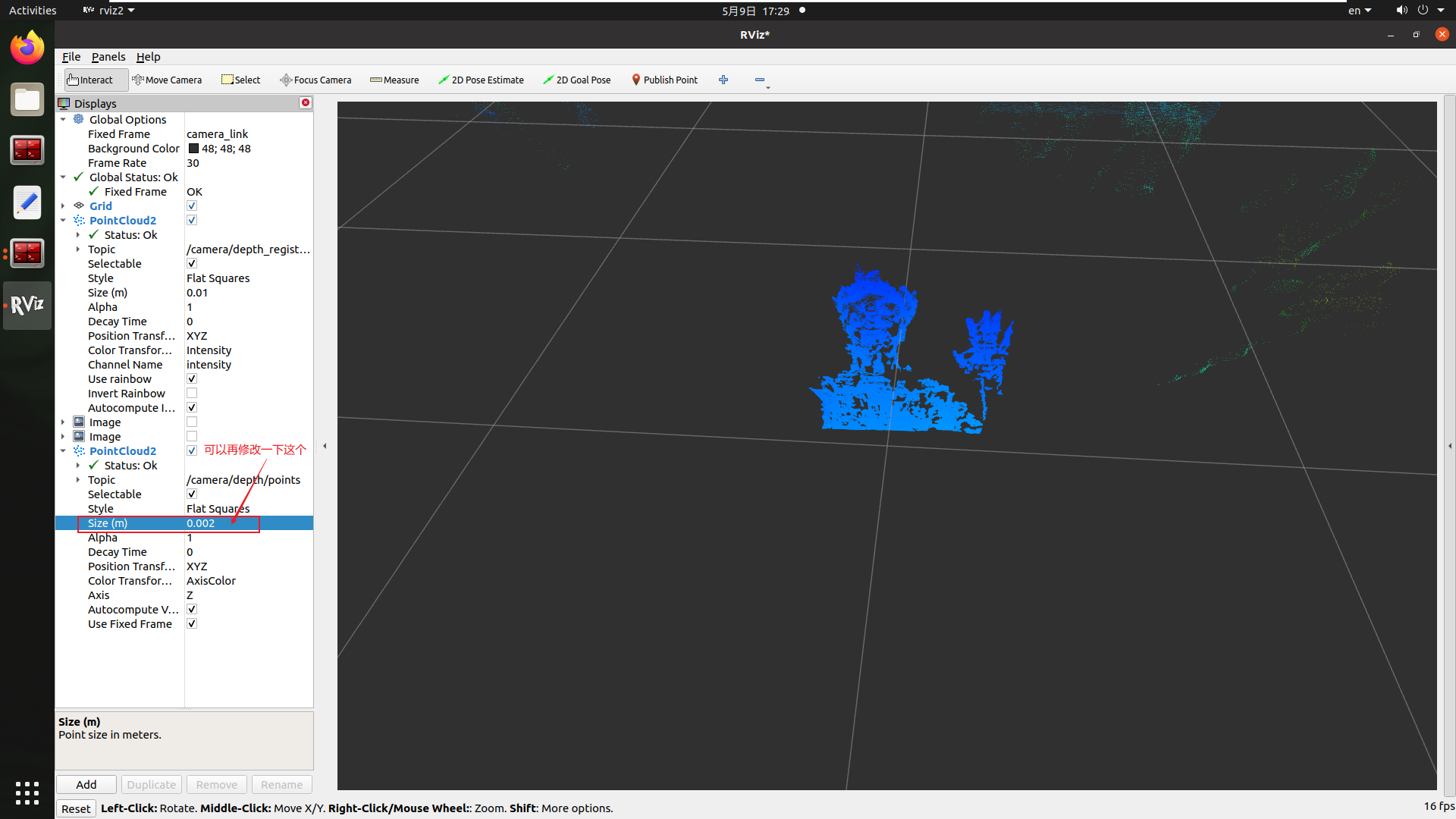
ros1下的修改步骤类似,也是修改对应的launch文件然后catkin_make编译就行了。