使用前必看
1、标定机械臂偏移量
严格按照以下步骤进行。
1.1、使用APP标定机械臂中位值校准
如果APP此时启动了,则打开手机APP-YahboomRobot,输入IP地址,连接上机械臂,点击机械臂设置-舵机校准,安装提示校准机械臂的中位值。
如果APP没有启动,输入以下指令启动APP然后再进行校准,
xpython3 /home/yahboom/rosmaster/YahboomArm.pyc
2.2、使用标定程序标定偏移量(三维空间夹取需要调节机械臂初始位置才需要做,其他情况跳过下面教程)
如缺少功能包可直接到网盘资料提供的程序源码下载,将源码放入~/dofbot_ws/,如果已有此功能包忽略即可
xxxxxxxxxxcolcon build --packages-select dofbot_sorting输入以下指令启动标定程序,第一个容器终端,
xxxxxxxxxxros2 launch dofbot_info camera_arm_kin.launch.py
再次进入相同的容器终端输入,
xxxxxxxxxxros2 run dofbot_sorting get_offset
然后把机械臂固定在地图上,如下图所示,
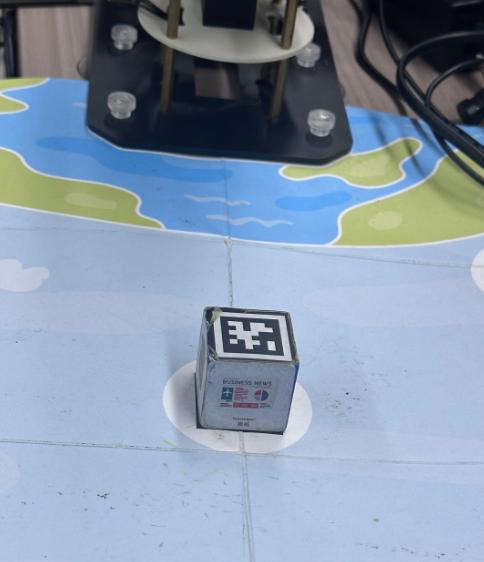
程序画面会识别到机器码木块,然后按下空格键,即可完成标定。
如果需要调节高度功能包名称为dofbot_sorting,如果是默认位置,功能包是dofbot_sorting_3d例如
如果三维空间夹取的颜色分拣需要启动
xxxxxxxxxxros2 run dofbot_sorting_3d color_sorting
如需要修改机械臂初始姿态
xxxxxxxxxxros2 run dofbot_sorting color_sorting