快速上手
快速上手1、首次启动1.1、使用前提1.2、启动系统2、系统环境2.1、基础信息2.2、Jupyter Lab2.3、Label Studio2.4、访问Docker2.5、Open WebUI3、注意事项
1、首次启动
启动出厂镜像:适合初学者,无需自己搭建环境即可体验各个案例玩法!
1.1、使用前提
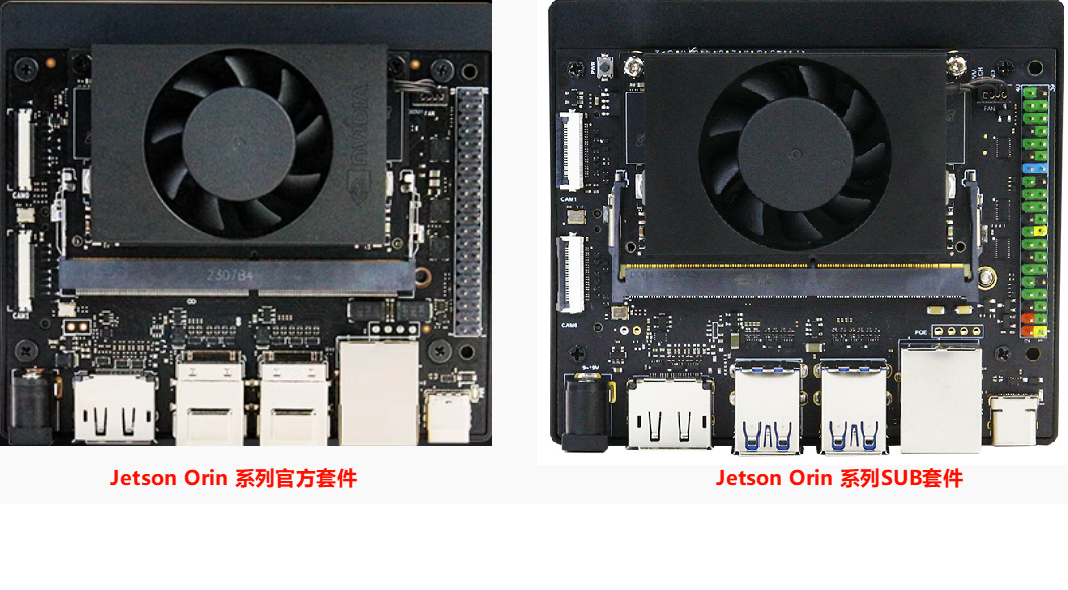
版本外观区别:
使用步骤:

说明:
1、固态硬盘扩容:对应教程【第二章 主板基础:固态硬盘扩容】
1.2、启动系统
主板装好固态硬盘、网卡、天线以及DP数据线(连接显示器)就可以使用配套的DC电源适配器启动主板系统。
Jetson Orin系列主板需要接显示器才可以正常显示系统桌面,首次使用建议用户外接显示器使用,将VNC远程远程配置好。
注意:根据用户反馈,部分用户可以使用显卡欺骗器和虚拟桌面实现VNC远程,该内容不属于教程范围!
2、系统环境
2.1、基础信息
系统用户名:jetson
系统密码:yahboom
2.2、Jupyter Lab
局域网访问:http://主板IP:8888/
访问密码:yahboom
2.3、Label Studio
局域网访问:http://主板IP:8080/
访问账号:yahboom@163.com
访问密码:yahboom@163.com
2.4、访问Docker
ROS1环境位于Docker内:
sh ~/ros_melodic.sh
2.5、Open WebUI
局域网访问:http://主板IP:8080/
访问用户名:yahboom 访问邮箱:yahboom@163.com 访问密码:yahboom
3、注意事项
其中Label Studio和Open WebUI占用的端口一致,若运行其中一个容器,需要保证另一个处于关闭状态!
由于软件版本的迭代和用户的环境不同,我们无法确保所有人都可以成功搭建环境,但唯一可以提供的就是一个完整的系统镜像,用户若遇到环境问题且自行无法解决,请使用我们提供的出厂镜像进行教程的学习。