1. 产品概述
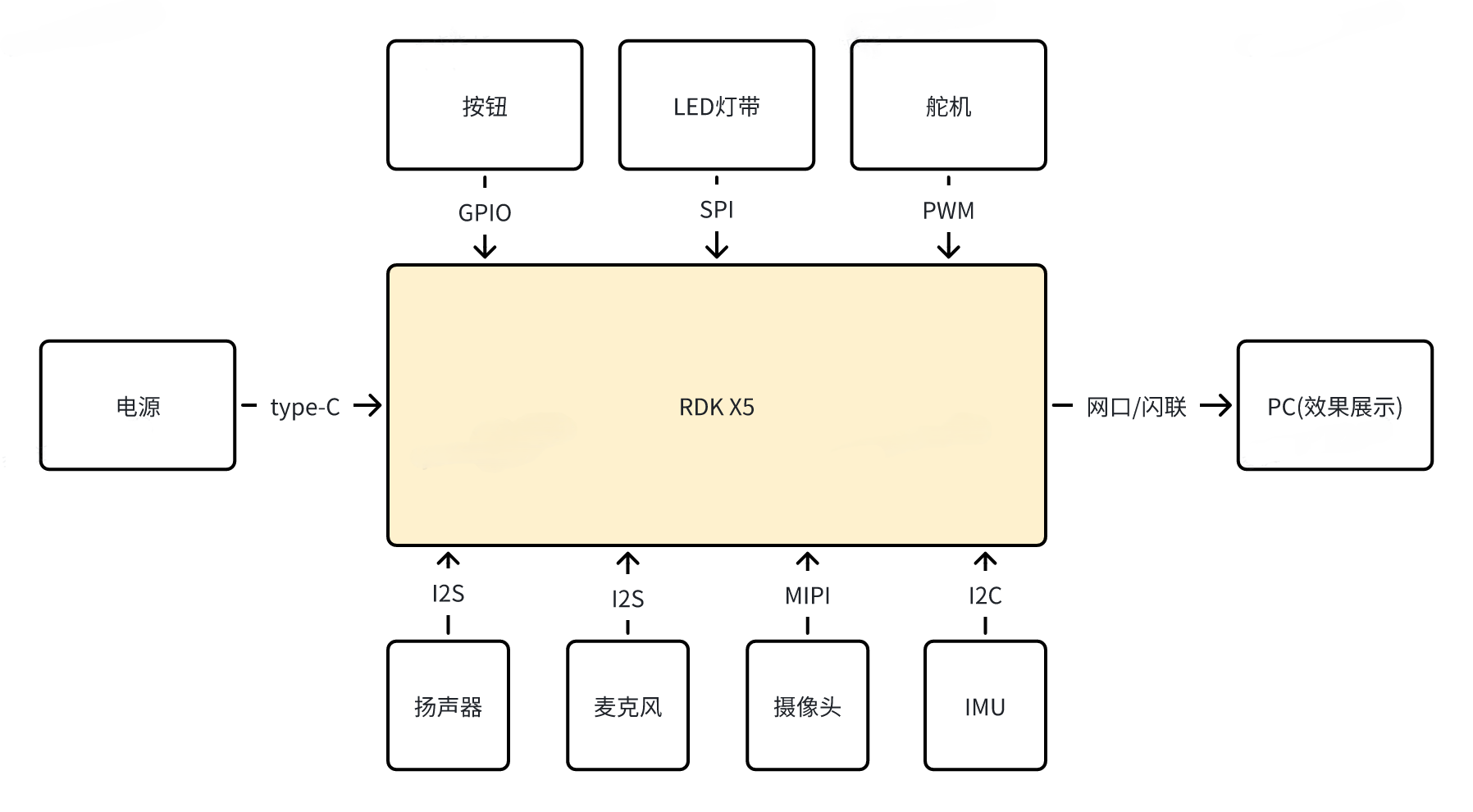
D-Robotics RDK X5 Magicbox 是一款融合视觉、听觉与动觉的多模态智能平台。搭载高性能计算核心 RDK X5,集成双目相机、环形灯带、麦克风、扬声器与多功能可动撑脚,可实现 "看、听、说、动" 的自然交互体验。无论用于教学研究、创意开发,还是智能交互展示,RDK X5 Magicbox 都能帮助用户快速开启多模态人工智能的探索之旅。

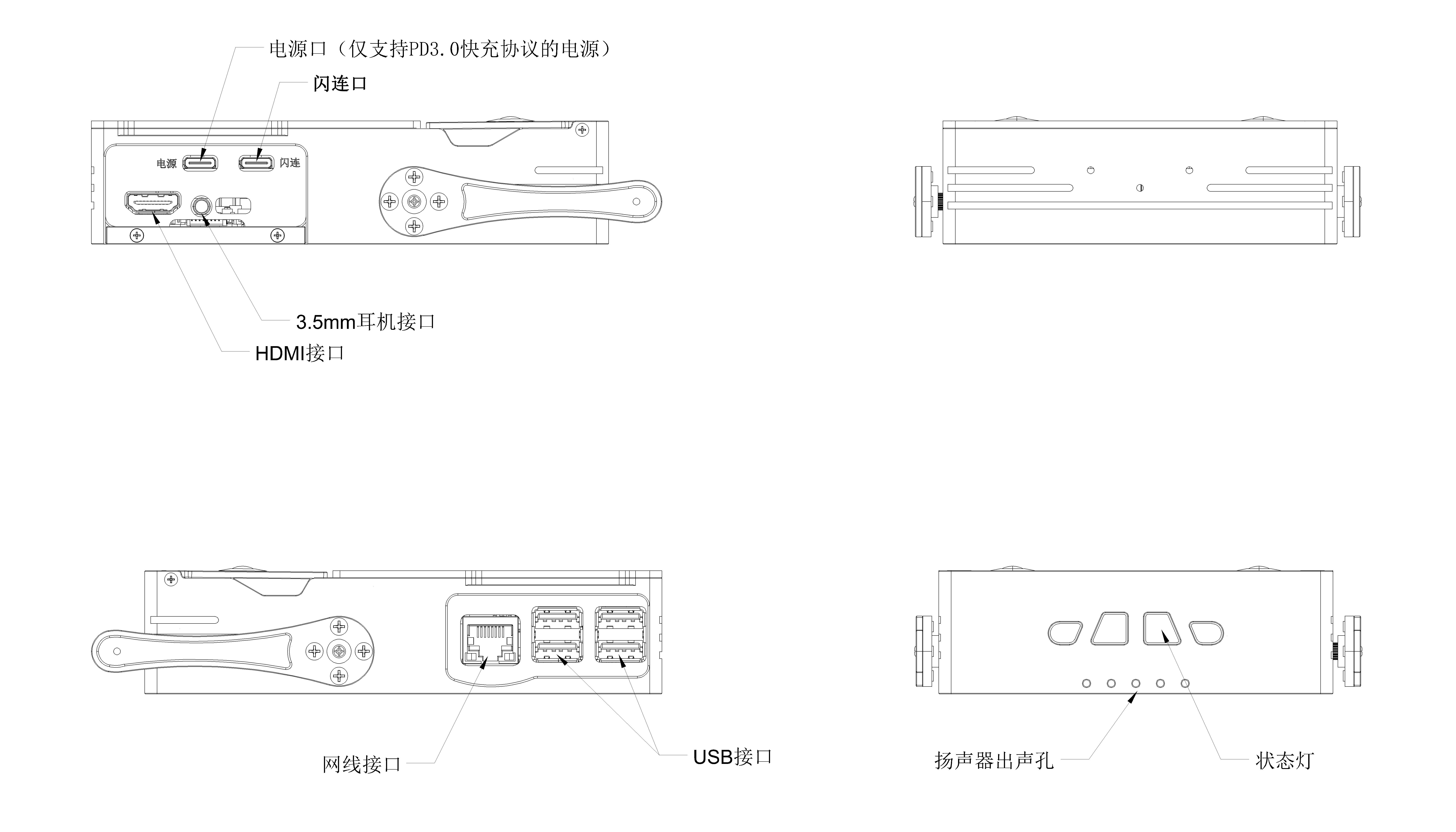
物理结构
接口、按键与指示灯说明
| 名称 | 说明 |
|---|---|
| 双目相机 | 用于图像感知以及获取深度信息,支持手势识别、目标定位、空间测量等使用场景。 |
| 电源口 | 用于为 Magicbox 供电,请使用支持 PD 3.0 协议的电源适配器。 |
| 闪连口 | 可用于连接、烧录系统、调试。 |
| HDMI 接口 | 用于在显示器输出 Ubuntu 系统桌面,支持实时显示摄像头、网络流画面功能。 |
| 3.5mm 耳机接口 | 用于音频输入与输出。 |
| 网线接口 | 用于与上位机建立有线网络连接,实现高速、稳定的数据通信。 |
| USB 接口 | 用于连接外设。 |
| 扬声器出声孔 | 用于声音输出。 |
| 麦克风 | 用于接收语音指令。 |
| 功能按键与状态灯 | 上电: 白灯依次亮起,等待大约 50s 白灯闪烁并伴随音效:启动完成 功能按键:启动预置示例;灯带面向用户从左到右依次为 按键1:启动双目深度估计功能,灯光变为红色 按键2:启动手势交互功能,灯光变为绿色 按键3:启动语音交互功能,灯光变为蓝色 |
硬件规格
技术规格
RDK X5 8G 主控
D-Robotics RDK™ X5 搭载 D-Robotics Sunrise™ 5 智能计算芯片,可提供高达 10 TOPS 的算力,是一款面向智能计算与机器人应用的全能开发套件,接口丰富,极致易用,支持 Transformer、RWKV、Occupancy、Stereo Perception 等多种复杂模型和最新算法,加速智能化应用快速落地。
类别 规格说明 控制器 控制器型号 RDK X5 8G CPU 8 x 1.5GHz Arm® Cortex®-A55 BPU 1 x Bayers BPU,具有10TOPS (INT8) 算力 GPU 1 x GPU,具有32GFLOPS算力 内存 8 GB LPDDR4 存储 板载 1 Gbit NAND 闪存 提供 microSD 卡插槽,支持 UHS-I 模式,预置 32GB TF卡 互联接口 4 x USB 3.0 Type-A (主机) 1 x USB 2.0 Type-C (设备) 显示 1 x HDMI Type-A 接口,最高支持 1080p@60fps 音频能力 提供 3.5mm 音频插孔,支持立体声输入输出 网络能力 1 x RJ45 接口,支持 10/100/1000 Mbps 千兆以太网 2.4/5 GHz 双频无线局域网,符合 IEEE 802.11ax (Wi-Fi 6) 标准 支持 Bluetooth® 5.4 协议 板载高性能天线 电源 5V / 5A DC 输入,Type-C 接口 提供 5V 和 3.3V 外部供电能力 搭载地瓜机器人双目相机:RDK Stereo Camera GS130WI
RDK™ Stereo Camera GS130WI 是一款基于 MIPI 接口的双目深度相机,搭载双颗 SC132GS 全局快门图像传感器与 ICM-42688-P 六轴 IMU,支持双目同步曝光及外部触发。相机基线 70 mm,单路分辨率 1280×1080,最高帧率 120 fps,具备高动态范围(HDR)、高信噪比(40 dB)与 850/940 nm 近红外增强能力,适用于机器人视觉、机器视觉检测及运动姿态感知等应用场景。
规格 说明 相机型号 RDK Stereo Camera GS130WI 芯片型号 SC132GS IMU ICM-42688-P 最大分辨率&帧率 1080×1280@120fps FOV 对角 157.2° / 水平 96.8° / 垂直 115.6° ±3° 双目间距(mm) 70 最大翻折角度 110° 舵机:PTK 7465 MG-D
PTK 7465 MG-D 搭载高压空心杯电机以及高精度定位器,大扭力及 ±180° 的工作角度能应付多种使用场景;中壳铝合金材质全方位提升了可靠性及稳定性。
规格 说明 舵机型号 PTK 7465 MG-D 角度范围 ±180° 空载速度 0.11–0.070 sec/60° 堵转扭力 3.8–5.8 kg·cm 其他板载资源
- 4 颗 WS2812B 可编程 LED 组成状态灯,支持 24-bit 全彩显示。
- 配备 1 颗麦克风、1 颗扬声器以及 3 个可自定义功能的按键。
包装及裸机规格
| 规格 | 说明 |
|---|---|
| 外包装 | 尼龙针织包装,EVA 发泡内托 |
| 裸机尺寸(mm) | 162 x 129 x 36.4 |
| 裸机重量(g) | 517 |