使用前必看
1、进入Docker容器
1.1、初次进入
机械臂开机后,正常进入桌面,使ssh登陆或者vnc登陆主板后,打开终端,输入以下指令启动一个新的docker容器,
sh Docker_ROS.sh
然后就进入了这个容器中,首次进入会默认启动APP大程序控制的,这个可以先不用关闭,
接着,主板再打开一个终端,输入,docker ps 这个会列出当前运行的容器,如下图所示,

记住这NAMES的内容,这个就是容器的名字,后续根据这个容器名字来进入指定容器中,比如说我现在要进去这个容器没那么就在主板终端输入,
xxxxxxxxxxdocker exec -it priceless_bardeen /bin/bash
按下回车,就进入到里边了,

1.1、关机后再次进入
如果是重启后,则需要先重启容器,才能进去到里边,还是以priceless_bardeen为例,主板终端输入以下指令重启docker,
xxxxxxxxxxdocker restart priceless_bardeen
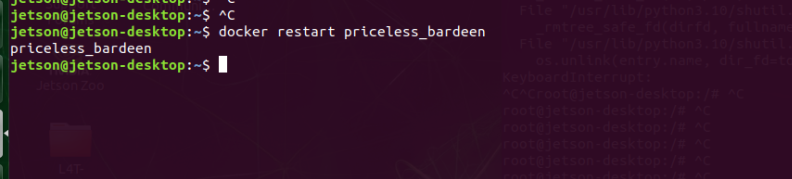
接着就可以使用exec指令进入到docker中,主板终端输入以下指令,
xxxxxxxxxxdocker exec -it priceless_bardeen /bin/bash
按下回车,就进入到里边了。
2、标定机械臂偏移量
严格按照以下步骤进行。
2.1、使用APP标定机械臂中位值校准
进入到容器中,如果APP此时启动了,则打开手机APP-YahboomRoboe,输入IP地址,连接上机械臂,点击机械臂设置-舵机校准,安装提示校准机械臂的中位值。
如果APP没有启动,那么就在容器中输入以下指令启动APP然后再进行校准,
xxxxxxxxxxsh /root/APP_DOFBOT/start_app.sh
2.2、使用标定程序标定偏移量
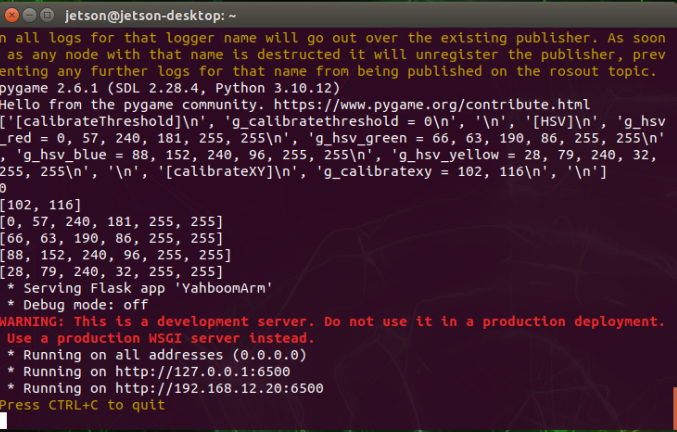
在容器中输入以下指令启动标定程序,第一个容器终端,
xxxxxxxxxxros2 launch dofbot_info camera_arm_kin.launch.py
再次进入相同的容器终端输入,
xxxxxxxxxxros2 run dofbot_sorting get_offset
然后把机械臂固定在地图上,如下图所示,
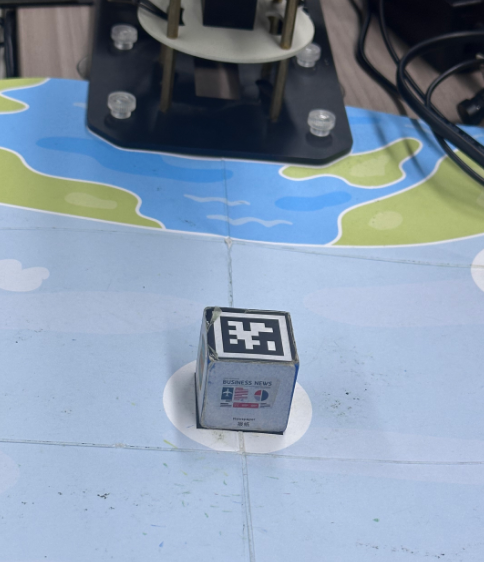
程序画面会识别到机器码木块,然后按下空格键,即可完成标定。