CM5版本注意事项
1.CM5版本python 运行环境前提
只有通过putty的环境这种无桌面的工具远程rider-pi,才需要执行以下的命令,其它带桌面的,比如vnc这种工具,则无需运行以下的命令。 (jupyter lab的程序无需操作,直接进入jupyter lab界面运行程序即可) 所有python相关的程序都需要通过进入python的虚拟环境运行。
运行以下指令即可进入虚拟环境(如果是通过vnc这种远程方式打开的终端,默认是进入到虚拟环境里的)
source ~/.bashrc出现如图下所示的情况,既说明了该终端进入到虚拟环境了
然后再执行python相关的指令,如:
xxxxxxxxxxpython3 xxx.py如果想要退出虚拟环境则使用以下指令(一般无需操作)
xxxxxxxxxxdeactivate如下图:即为退出虚拟环境
建议:安装python相关的第三方库,都进入到虚拟环境里面进行安装,这样可以减少很多不必要执行错误。
2.CM5版本语音相关相关的功能玩法(要先把密钥填好)
- 语音的玩法唤醒的时候,因为散热结构的问题,会影响到唤醒的识别.
- 假如唤醒通过语音的方式比较困难,可以通过按下屏幕的左上方的按键进行手动唤醒.
- 进行声音采集的时候,也需要用极可能标准普通话并大声的喊出来。
- 如果语音唤醒比较困难,那就需要在经常使用的环境下,保持相对的安静,运行以下命令,重新录制一段当前环境的风扇噪音
xxxxxxxxxxcd ~/RaspberryPi-CM5arecord -r 16000 -f cd -d 8 fannoise.wav #等待8秒的录制时间这样就能被唤醒降噪算法过滤掉风扇的声音,使其有更好的灵敏唤醒效果。
3.卡顿情况
当Rider-pi的电量低于25以下,不结束大程序的情况下,然后直接运行单独案例即会出现终端卡顿,程序关不掉的情况。 解决方法:断电重启Rider-pi,再结束掉大程序,最后再运行对应的单独案例
4.机器人恢复站立
假如机器人(Rider-pi)出现顶部出现红灯,双腿缩起来,说明机器人进入锁死状态,需要重新扶正约2-3秒后,机器人会自动恢复站立。
锁死状态:

用手扶正

恢复平衡

5.区分CM4版本和cm5版本
外观
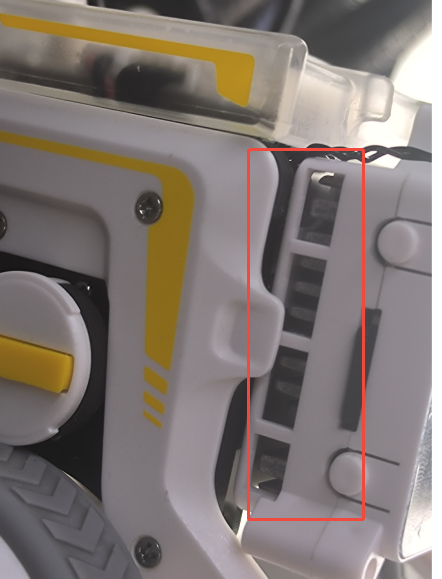
观察硬件屏幕,开机时有明显的风扇声,说明为cm5版本的Rider-pi,并且cm5版本的屏幕一侧有镂空,如下图所示:
模组

功能
CM5版本新增以下功能

6.风扇调速
默认出厂的系统,风扇是一直开启的,如果需要根据温度去设置风扇的转速可进行一下修改:
- 终端运行
xxxxxxxxxxsudo nano /boot/firmware/config.txt找到如图的界面:
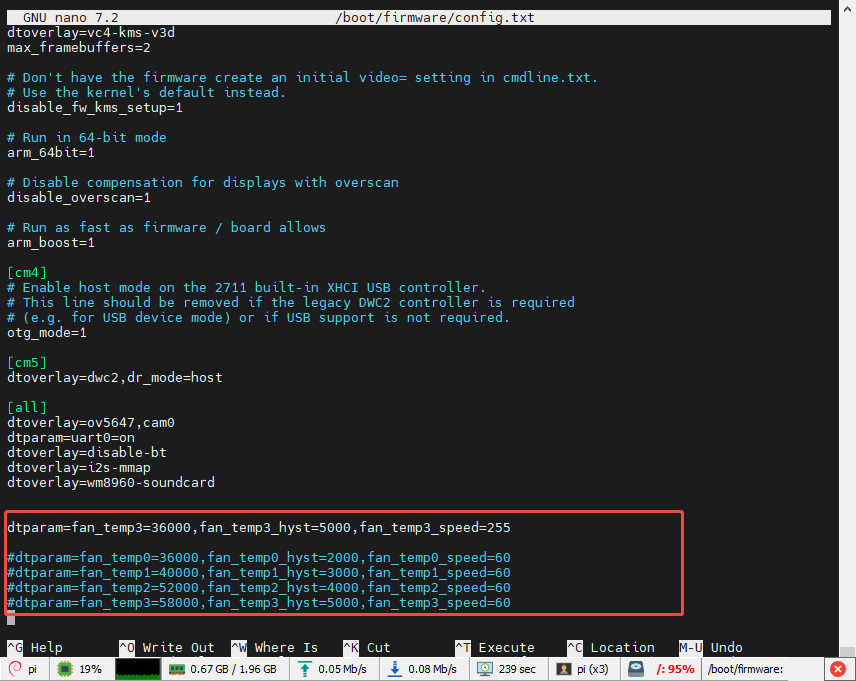

根据自己的需求进行对风扇的配置。 每个参数的含义如下: #fan_temp0/1/2/3 表示温度(360000表示36℃) #fan_temp0/1/2/3_speed 表示对应的转速(值最大255) #fan_temp0/1/2/3_hyst 表示迟滞温度