手机遥控
蓝牙遥控
- 先下载XGO的app,可以通过说明书的二维码扫描下载或者应用商店下载。
- 打开xgo的APP,就会进入到首页,点击蓝牙连接。

- 打开手机的定位权限和蓝牙开关,然后手机摇一摇,就连接上RiderPi,并会自动返回首页。


- 然后点击首页的箭头,进入遥控的界面

wifi遥控
首先安装手机安装好XGOBOT的app。此app需要连接wifi才能进行遥控
将机器人开机 请务必将双轮足机器人(Rider-pi)按以下视频方式摆放在平整的地下或者桌面上,拨动机器人开关开机, 机器人彩色的灯亮起来后会自动站立向前走15cm左右,待机器人稳定后即完成了初始化,开机约30秒之后, 机器人屏幕会自动亮起显示UI界面。
cm4版本:

cm5版本:

- 给机器人连接网络
方法一(常用):进入XGOBOTAPP点击屏幕右上角图标后进入wifi信息二维码生成页面, 输入您想让机器人连接上的WIFI的ssid和密码,点击生成二维码后,启动机器人示例程序中第二个“无线联网”这个应用程序,让机器人摄像头扫描手机上生成的二维码,此时机器人屏幕会显示绿色的成功字样,然后重启机器人则会自动连接上该指定SSID。 具体的连接方法可以看资料里面第1章第6节连接wifi的教程文档。
方法二,树莓派桌面配置 如果前两种方法都无法让机器人联网,一般情况则是树莓派的配置文件和路由器的网络频段不匹配造成的, 此时可以通过随机配置的HDMI线和Type-C的USB HUB ,使用显示器进入树莓派桌面系统进行网络配置, 此处不再赘述,请树莓派用户根据网络上的教程进行设置。
然后rider-pi进入遥控模式,
cm4版本在主界面即可进入遥控模式,cm5版本需要进入示例模式打开手机遥控。

启动页面

获取到Rider-pi机器人的ip地址。在XGOBOTAPP的进去第一个页面,输入Rider-pi的IP地址。

- 连接成功后,可以对机器人进行一个遥控操作。


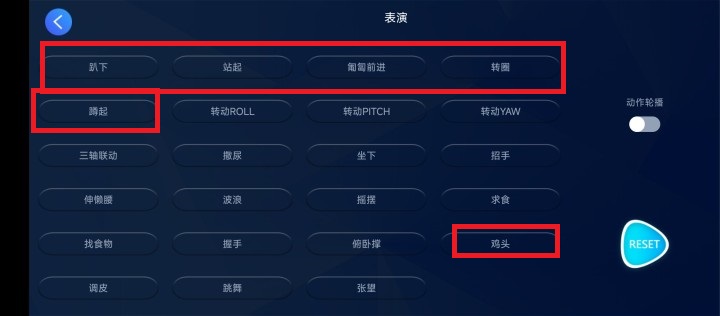
图片框出来的部分是对小车有效控制的,其它部分是无效的,因为该app不仅仅是Rider-pi机器人的app,还是其它机器人的控制app.


图片框出来的部分是对小车有效控制的,其它部分是无效的
图片框出来的部分是对小车有效控制的,其它部分是无效的