USB相机,舵机云台用户(必看)
说明:ROSMASTER-A1机器人的舵机云台,我们需要在组装之前进行以下操作,进行角度初始化
1.安装
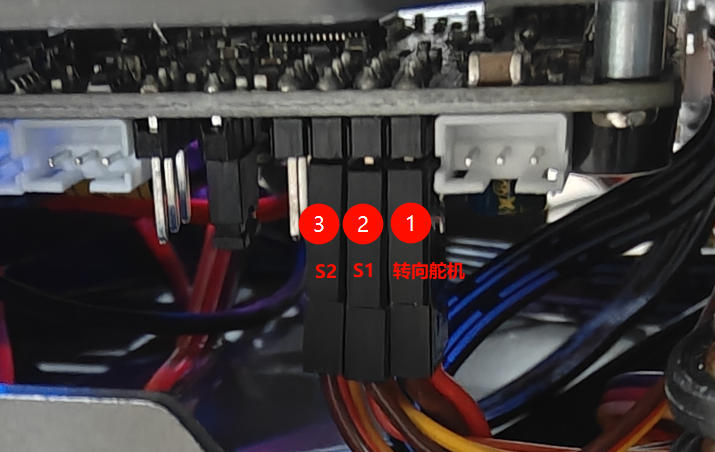
1.小车断电状态,(S1为水平舵机,S2为垂直舵机)舵机接线先对应连接
2.云台舵机先保持拆卸状态,小车上电,S1,S2舵机上电会复位到初始角度,
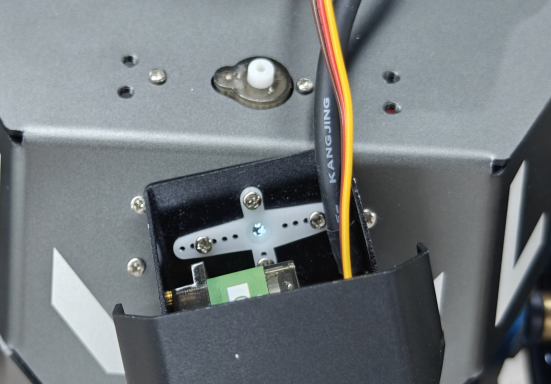
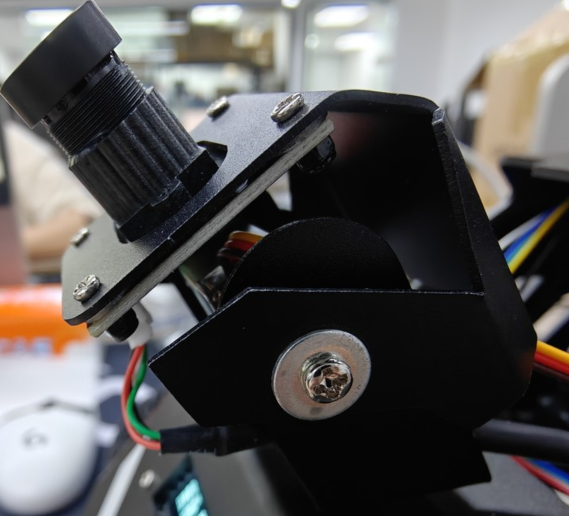
3.再将云台舵机安装上,注意此时不要再扭动到水平舵机的齿轮角度,小车断电后扭紧螺丝即可。
2.初始值设置
2.1自启动程序舵机初始值
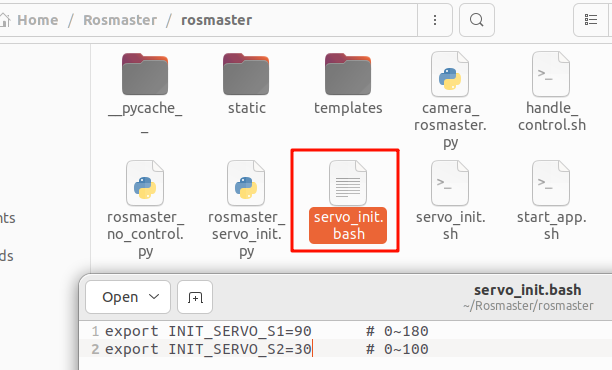
小车每次上电,驱动板会让云台置于初始角度(90,90),进入系统之后,舵机初始位置程序 会自启动,会再置于一个预设的角度(90,30)
⚠️因为舵机结构本身原因,齿轮必定会相差一个角度,所以设置为90度并不一定是摄像头水平居中的角度。
修改方法:
ORIN用户:
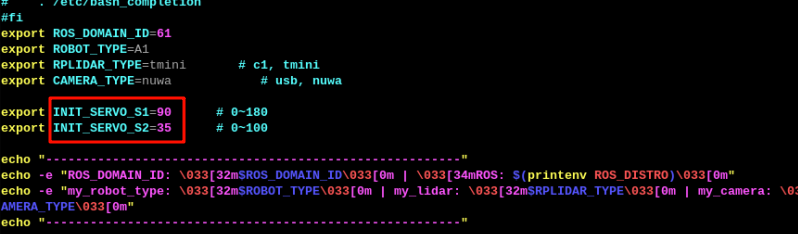
可以修改/home/jetson/Rosmater/rosmaster/servo_init.bash中的参数。
🐃 该配置会应用在 舵机初始位置程序 和 开机自启动手柄控制程序
pi5/jetson nano用户:
可以修改/home/pi/Rosmaster/rosmaster \ /home/jetson/Rosmaster/rosmaster中的参数。
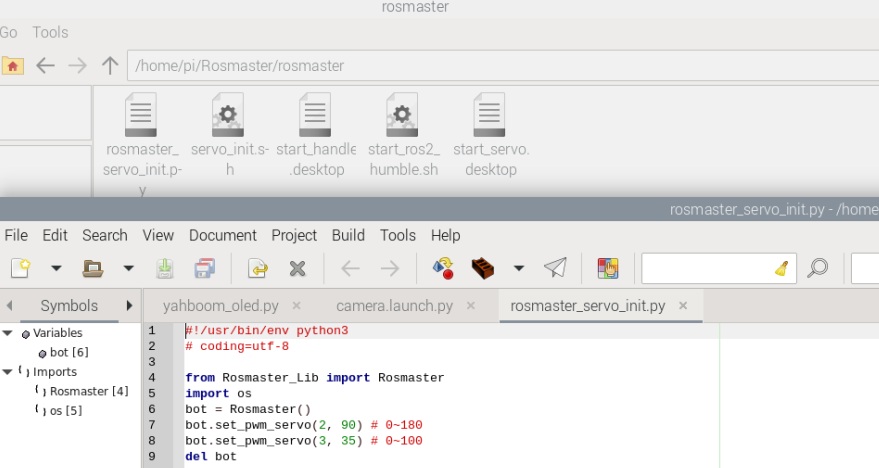
🐃 该配置会应用在 舵机初始位置程序
进入docker之后,(如不理解操作,请参考docker教程学习)
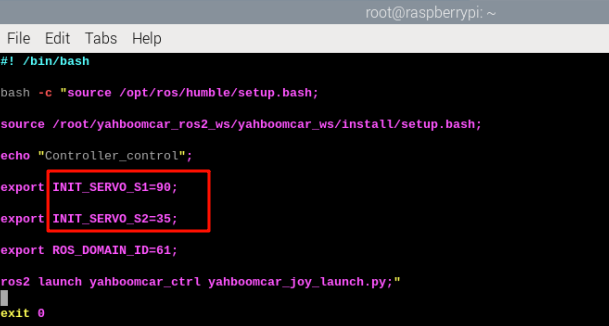
vim run_handle.sh

保存文件并退出,
🐃 该配置会应用在 开机自启动手柄控制程序
2.2视觉案例舵机初始值
大部分视觉追踪/跟随案例,启动舵机会置于一个初始值,这个是通过获取环境变量中预设的舵机角度,进行复位。
修改方法:
ORIN用户:
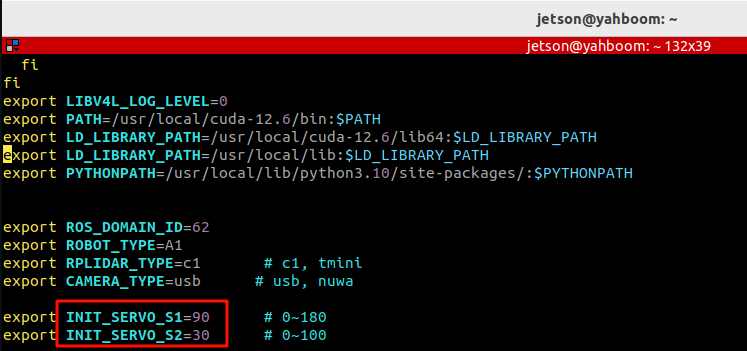
xxxxxxxxxxsudo vim ~/.bashrc
pi5/jetson nano用户:
进入docker之后,(如不理解操作,请参考docker教程学习)
xxxxxxxxxxsudo vim ~/.bashrc
保存文件并退出,
🐃该配置会应用在 视觉追踪/跟随案例