小车前轮舵机校准
说明:ROSMASTER-A1机器人的前轮舵机,因为结构问题,拓展板初始化的默认角度,小车前轮不一定是完全朝前,我们可以使用此程序,设置舵机中值
1.运行程序
我们先将小车架起来,设置合适的角度到小车前轮朝前即可
启动VNC远程到小车端,打开终端输入
xpython3 Rosmaster/rosmaster/calibrate_akm_angle.py
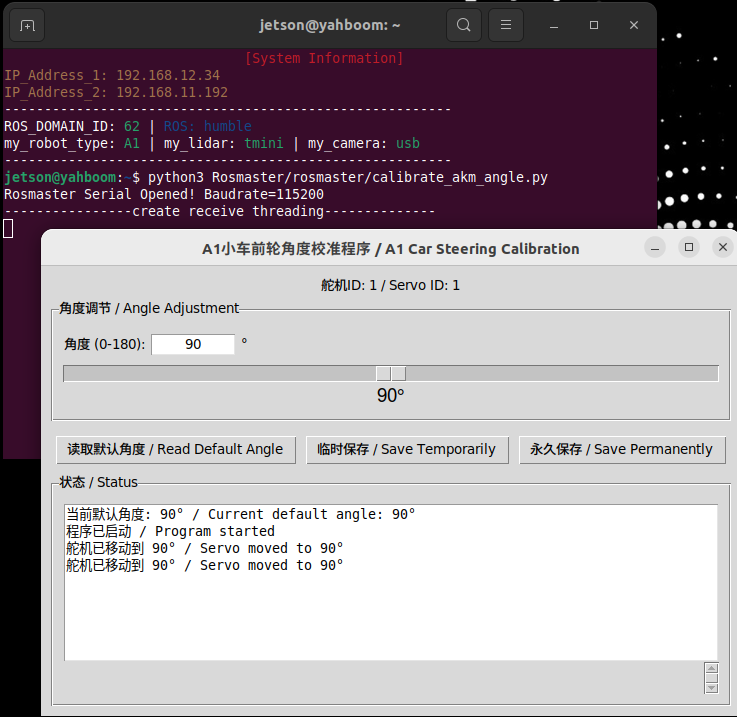
使用说明:
中值接受范围:angle=[60, 120],超出范围无法写入!
读取默认角度:获取ROS拓展板当前默认的舵机中位角度
临时保存:临时生效,下次重新上电/复位ROS拓展板,恢复上次舵机中位角度
永久保存:永久生效,将舵机中位值写入到ROS拓展板的FLASH中,掉电保存