2、快速启动手柄控制小车
2.1、什么是开机自启动手柄控制程序
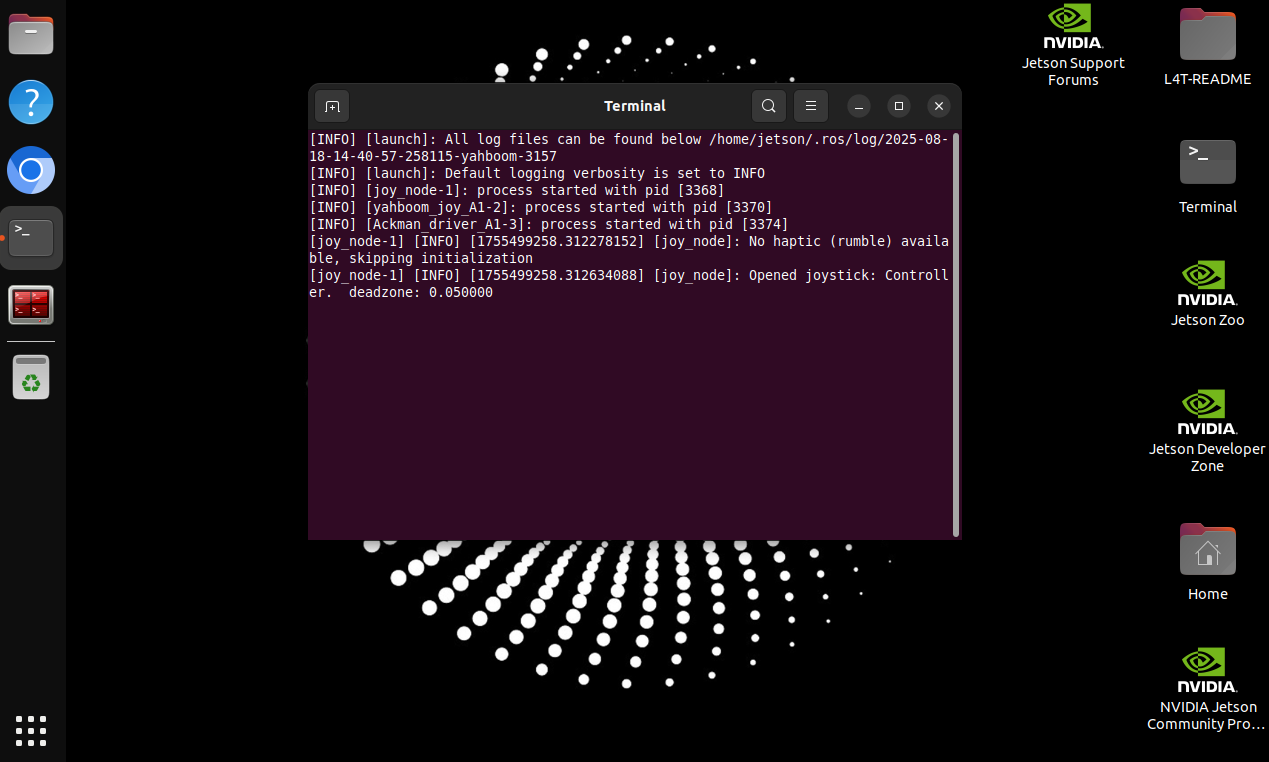
为了能够方便控制体验小车,系统中增加了一个手柄控制程序,此程序在主板系统开机时,此程序会自动启动,所以称做“开机自启动手柄控制程序”。
开机自启动手柄控制程序只是为了方便控制体验小车,在实际开发中,是需要将手柄控制程序关闭的,否则会占用设备,造成不可预估错误。所以开发程序前,请先手动关闭手柄控制程序。
关闭手柄控制程序有两种方式,一种是只关闭一次,下次开机它还会自动启动,叫做临时关闭,另一种方式是关闭后下次开机不会再自动启动,除非手动重新开启,叫做永久关闭。
jetson用户为例,手柄接收器请接在USBHUB板上,
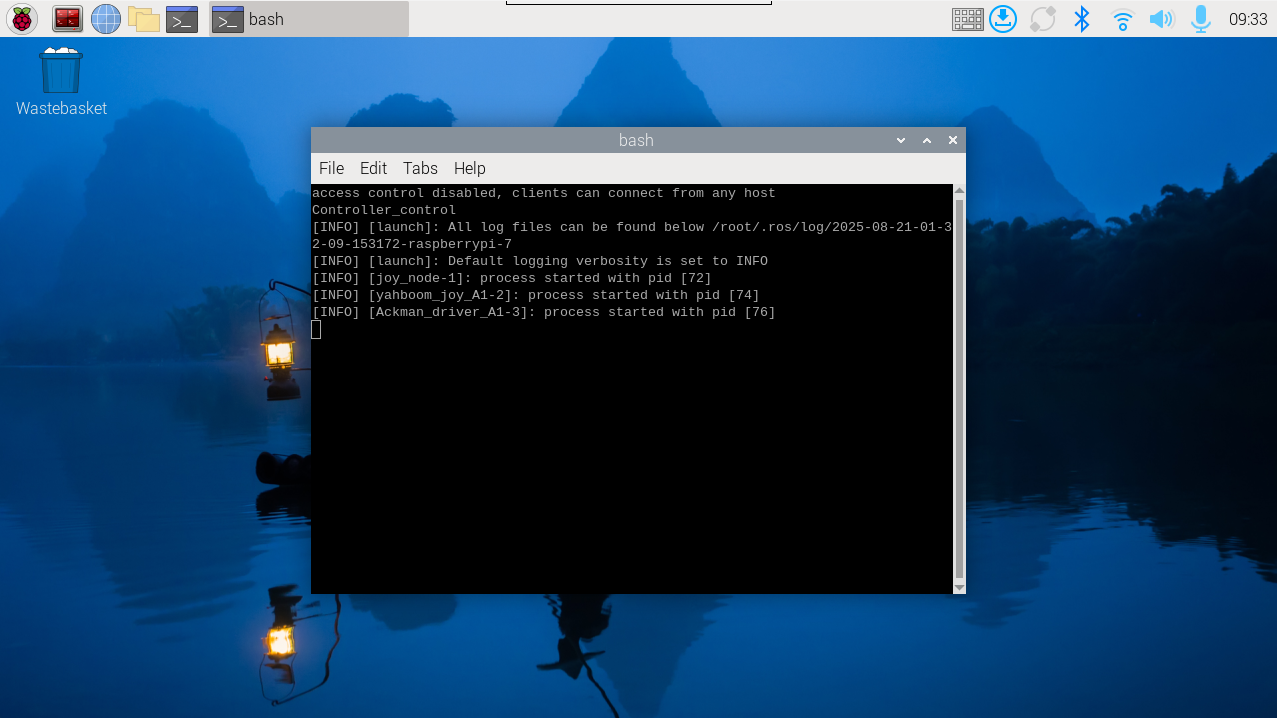
树莓派:

开启后,按下"START"按键,听到蜂鸣器响声,便可以开始遥控。遥控开启一段时间不用后会进入休眠模式,需要按下"START"按键结束休眠。如果要控制小车运行,还需要按下R2键,解除运动控制锁,才可以使用摇杆控制小车移动。
遥控效果说明,
| 手柄 | 效果 |
|---|---|
| 左摇杆上/下 | 前进/后退直走 |
| 左摇杆按下 | 降速 |
| 右摇杆左/右 | 左转/右转 |
| 右摇杆按下 | 加速 |
| "START"按键 | 控制蜂鸣器/结束休眠 |
| 方向键左/右 | 控制云台舵机左/右动 |
| 方向键上/下 | 控制云台舵机上/下动 |
| R1键 | 舵机归中 |
| R2键 | 手柄运动控制开关 |
2.2、临时关闭手柄控制程序
如果有7寸触摸屏或者显示屏和鼠标键盘,连接后登录进入桌面。
如果没有显示屏和鼠标键盘的情况,请使用同一局域网内的电脑打开VNC Viewer软件远程登录桌面的方式进入桌面。
VNC远程登录方式详细操作可以参考Linux操作系统\8.VNC远程控制
jetson用户
用户名:jetson
密码:yahboom
pi用户
用户名:pi
密码:yahboom
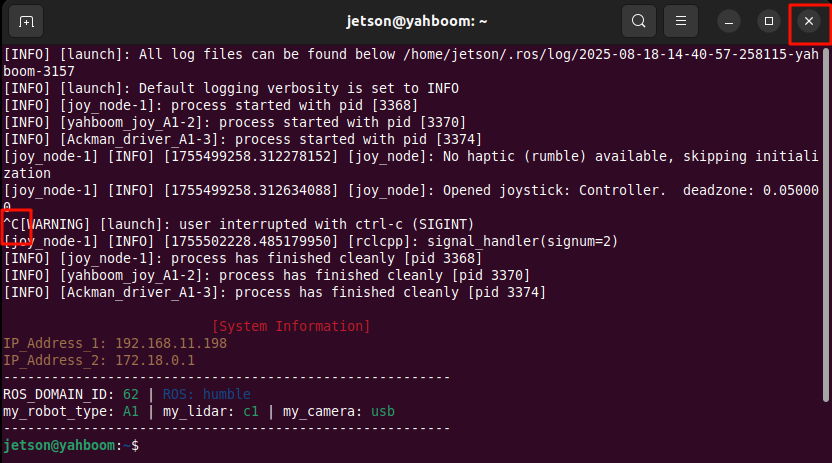
进入桌面后看到有一个终端,直接点击左上角的X符号关闭终端即可关闭手柄控制程序,或者在这个终端执行快捷键 ctrl+c。有时候可能会提示关闭终端会关闭正在运行的程序,选择确认关闭就可以。
2.3、永久关闭手柄控制程序自启动
先按照临时关闭的方式操作关闭正在运行的手柄控制程序。
jetson用户
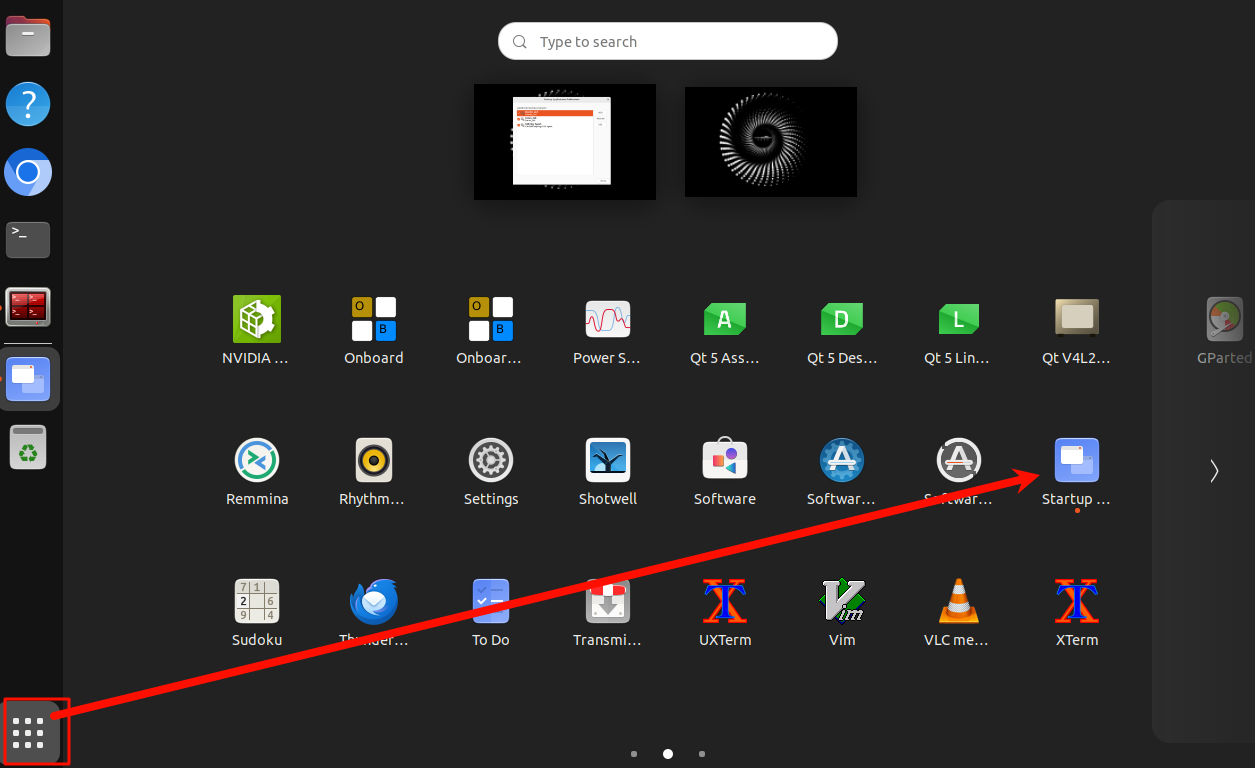
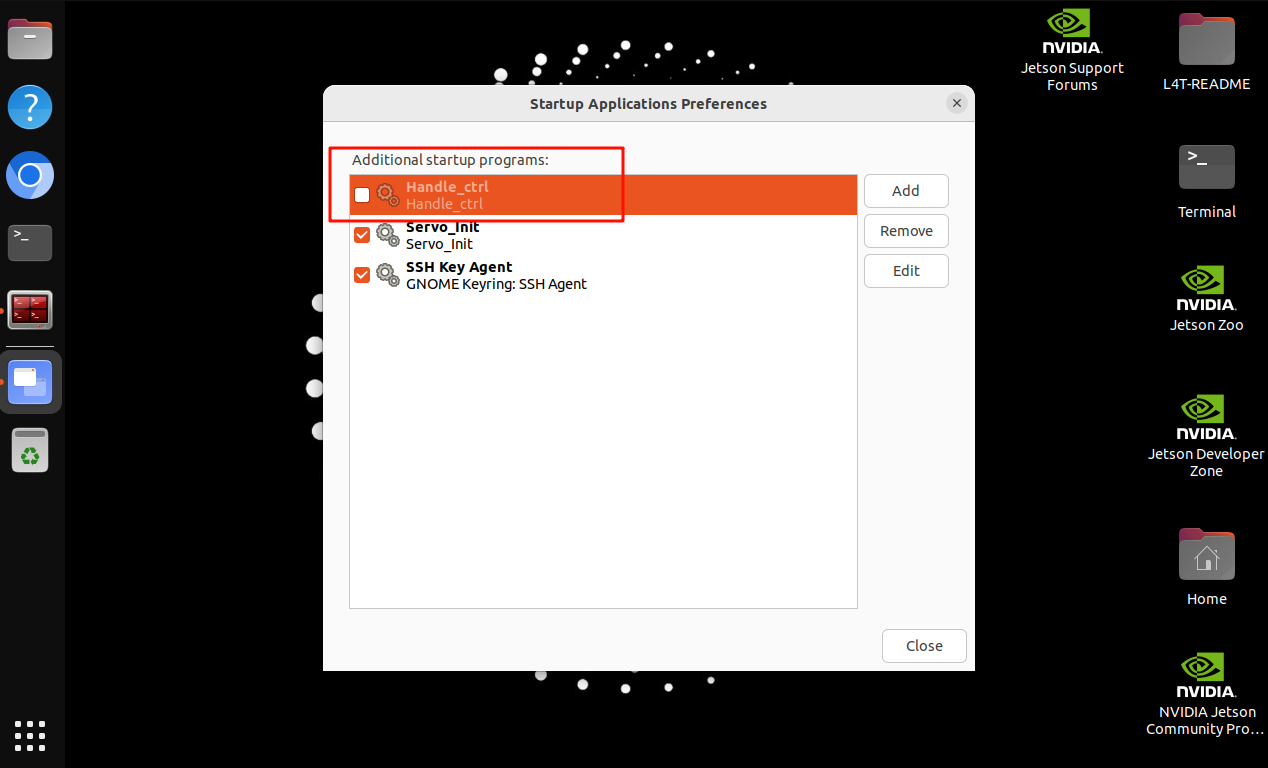
在打开Ubuntu系统的应用程序,搜索Startup Applications,将Handle_ctrl前面的勾去掉,如下图所示,即可永久关闭手柄控制程序。
树莓派5
sudo rm -rf /home/pi/.config/autostart/start_handle.desktop2.4、永久开启手柄控制程序自启动
jetson用户
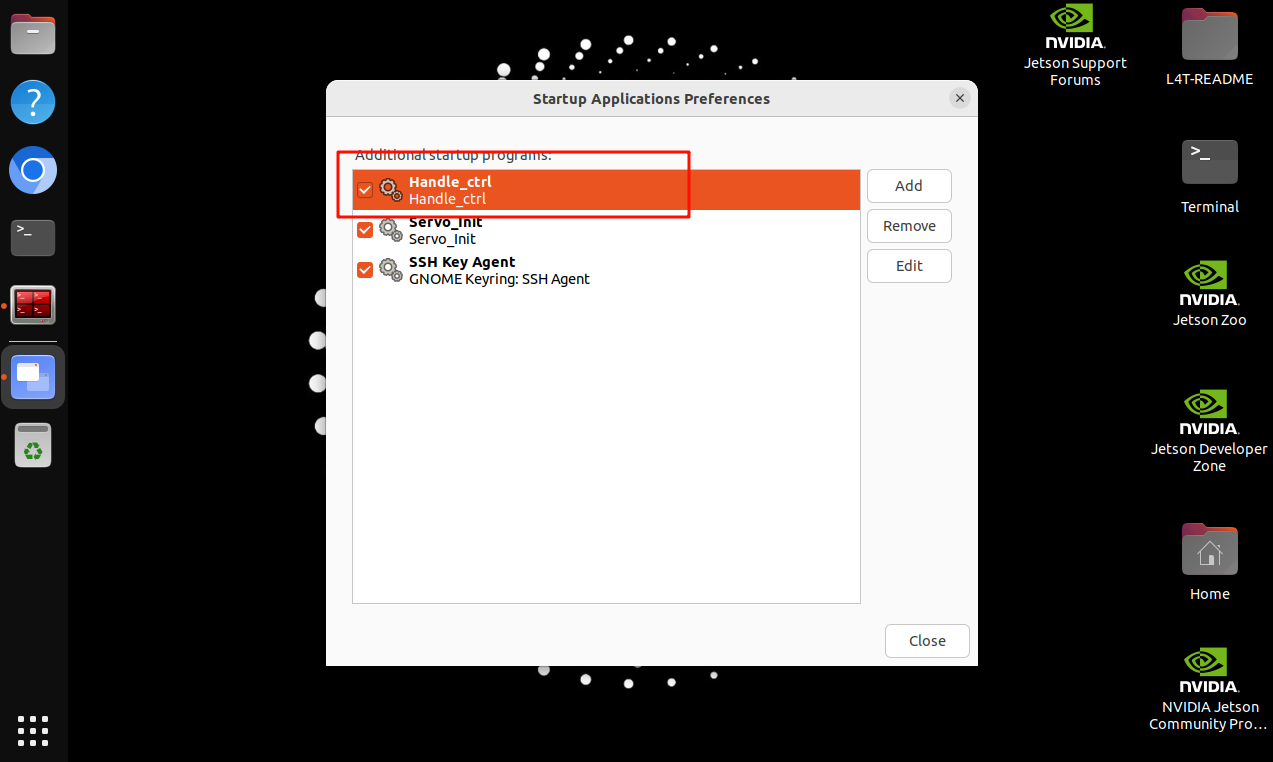
在打开Ubuntu系统的应用程序,搜索Startup Applications,将Handel_ctrl前面的方格打上勾,如下图所示,则下次系统开机就会自动启动大程序。
树莓派5
xxxxxxxxxxsudo cp -r /home/pi/Rosmaster/rosmaster/start_handle.desktop /home/pi/.config/autostart/sudo chown -R pi:pi /home/pi/.config/autostart/start_handle.desktop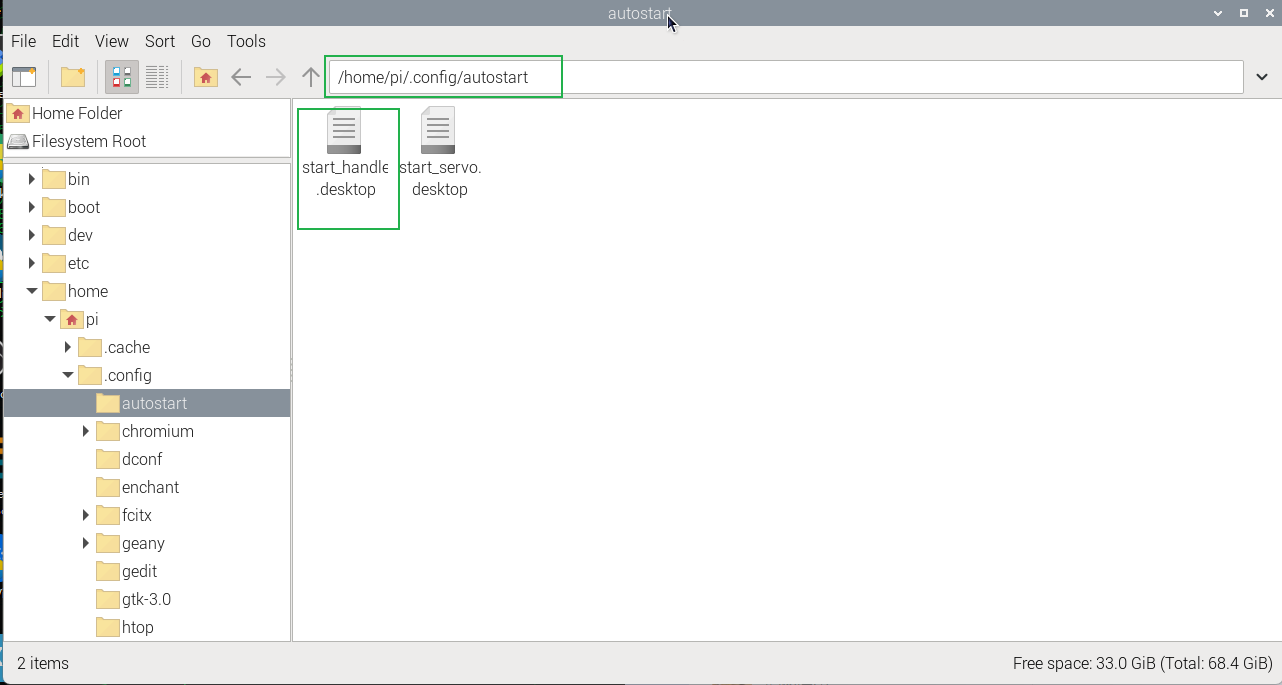
2.5、临时开启手柄控制程序
jetson用户
如果需要手动启动手柄控制程序,请先打开Ubuntu的终端,然后输入以下命令:
xxxxxxxxxxbash ~/Rosmaster/rosmaster/handle_control.sh 树莓派5
xxxxxxxxxxbash ~/Rosmaster/rosmaster/start_ros2_humble.sh