机械臂解算
1、内容说明
本课程实现机械臂的正运动学计算、逆运动学计算。正运动学是由机械臂的每个舵机的角度值计算末端执行的位姿,而逆运动学则是由末端的位姿来计算在每个舵机的角度值,两者在进行三维空间夹取的时候有着至关重要的作用。由正运动学算法,可以得知当前机械臂末端的位姿,在进行坐标系转换的时候,我们需要知道这个值;由逆运动学算法,可以计算机械臂末端要到达目标位姿,机械臂的每个舵机的角度是多少,在进行夹取前,需要调用这个算法去计算舵机值,然后控制舵机运动到夹取的姿态。
本节内容需要在终端中输入指令,这里根据主板类型来选择打开终端。本节课程以树莓派5为例。树莓派和Jetson-Nano主板,需要在宿主机中打开终端,然后输入进入docker容器的指令,进入到docker容器后的终端里边输入本节课程提及的指令,宿主机进入docker容器的教程可以参考本产品教程【0.说明书和安装步骤】中的【进入小车Dockder(Jetson-Nano和树莓派5用户看这里)】的内容。
Orin主板直接打开终端,输入本节课程提及的指令即可。
2、程序启动
在终端中,输入以下命令启动,
ros2 run arm_kin kin_srv启动后,终端输入ros2 node list来查看节点列表,

/kinemarics_arm是启动正逆解算的节点,终端输入ros2 node info /kinemarics_arm 来查询节点信息,
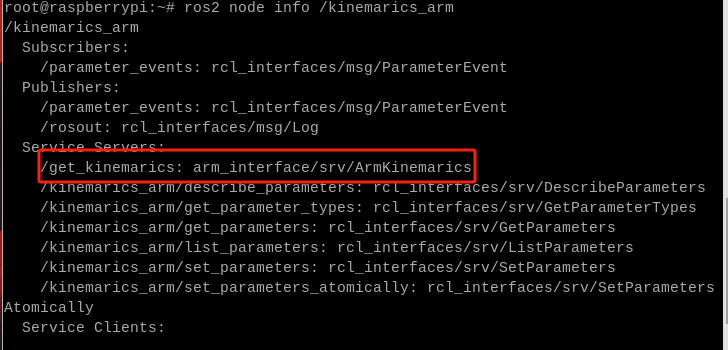
如上图所示,/kinemarics_arm节点提供了一个服务/get_kinemarics,服务的类型是arm_interface/srv/ArmKinemarics,终端输入ros2 interface show arm_interface/srv/ArmKinemarics查看这个服务数据包含哪些内容,
xxxxxxxxxxfloat64 tar_xfloat64 tar_yfloat64 tar_zfloat64 rollfloat64 pitchfloat64 yawfloat64 cur_joint1float64 cur_joint2float64 cur_joint3float64 cur_joint4float64 cur_joint5float64 cur_joint6string kin_name---float64 joint1float64 joint2float64 joint3float64 joint4float64 joint5float64 joint6float64 xfloat64 yfloat64 zfloat64 rollfloat64 pitchfloat64 yaw---把数据分为上下两部分,上边的是request,下边的response。request部分如下,
xxxxxxxxxx#机械臂末端位姿x坐标,单位是米float64 tar_x #机械臂末端位姿y坐标,单位是米float64 tar_y#机械臂末端位姿z坐标,单位是米float64 tar_z#机械臂末端位姿roll值 绕X轴旋转值,单位是弧度float64 roll#机械臂末端位姿pitch值 绕y轴旋转值,单位是弧度float64 pitch#机械臂末端位姿yaw值 绕z轴旋转值,单位是弧度float64 yaw#当前1号舵机值,单位是度float64 cur_joint1#当前2号舵机值,单位是度float64 cur_joint2#当前3号舵机值,单位是度float64 cur_joint3#当前4号舵机值,单位是度float64 cur_joint4#当前5号舵机值,单位是度float64 cur_joint5#当前6号舵机值,单位是度float64 cur_joint6#解算类型:ik表示逆运动学解算,fk表示正运动学解算string kin_nameresponse部分如下,
xxxxxxxxxx#1号舵机角度float64 joint1#2号舵机角度float64 joint2#3号舵机角度float64 joint3#4号舵机角度float64 joint4#5号舵机角度float64 joint5#6号舵机角度float64 joint6#机械臂末端位姿x坐标float64 x#机械臂末端位姿坐标float64 y#机械臂末端位姿z坐标float64 z#机械臂末端位姿roll值 绕X轴旋转值,单位是弧度float64 roll#机械臂末端位姿pitch值 绕Y轴旋转值,单位是弧度float64 pitch#机械臂末端位姿yaw值 绕Z轴旋转值,单位是弧度float64 yaw2.1、调用fk
我们调用fk来计算下:当机械臂向上伸直的时候,机械臂末端的位姿是多少。首先我们输入以下指令让机械臂向上伸直,在成功连接agent后,终端输入以下指令,
xxxxxxxxxxros2 topic pub /arm6_joints arm_msgs/msg/ArmJoints {"joint1: 90,joint2: 90,joint3: 90,joint4: 90,joint5: 90,joint6: 90,time: 1500"} --once运行后,机械臂会向上伸直,接着,我们在终端输入以下指令,调用fk服务,
xxxxxxxxxxros2 service call /get_kinemarics arm_interface/srv/ArmKinemarics "{tar_x: 0.0, tar_y: 0.0, tar_z: 0.0, roll: 0.0, pitch: 0.0, yaw: 0.0, cur_joint1: 90.0, cur_joint2: 90.0, cur_joint3: 90.0, cur_joint4: 90.0, cur_joint5: 90.0, cur_joint6: 90.0, kin_name: 'fk'}"这里输入的值有cur_joint1到cur_joint6的值,我们都是输入90.0,还有就是kin_name的值,我们输入'fk',表示调用fk-正解服务,终端会回复如下图的以下的内容,
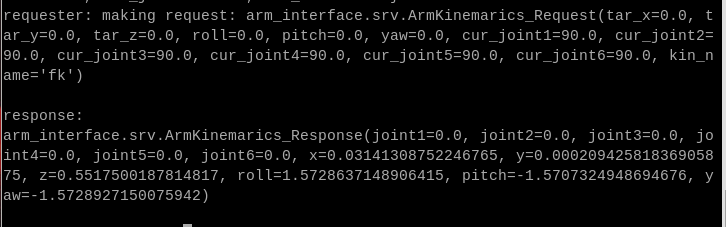
查看response部分:
xxxxxxxxxxresponse:arm_interface.srv.ArmKinemarics_Response(joint1=0.0, joint2=0.0, joint3=0.0, joint4=0.0, joint5=0.0, joint6=0.0, x=0.03141308752246765, y=0.00020942581836905875, z=0.5517500187814817, roll=1.5728637148906415, pitch=-1.5707324948694676, yaw=-1.5728927150075942)我们只需要关心后边的x、y、z、roll、pitch和yaw的值。这里表示的是机械臂末端的位姿坐标,表示的是,在世界坐标系下,机械臂末端的位置,与base_link(0,0,0)为基准点,当机械臂伸直向上的时候,xyz和rpy的值为x=0.03141308752246765, y=0.00020942581836905875, z=0.5517500187814817, roll=1.5728637148906415, pitch=-1.5707324948694676, yaw=-1.5728927150075942,这里在虚拟机启动urdf显示查看下,虚拟机终端输入以下指令启动urdf显示,
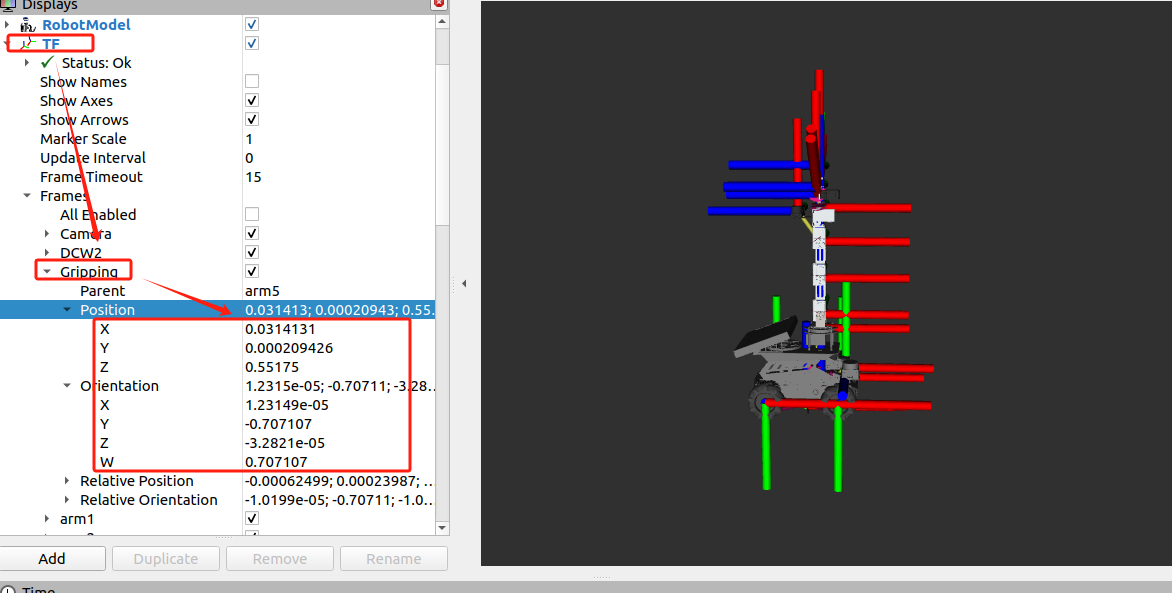
xxxxxxxxxxros2 launch yahboom_M3Pro_description display_launch.py如下图所示,使用TF插件来查看Gripping的位姿,xyz的坐标值与response的值相差无几,rpy的值则需要通过四元数转rpy来获取。
2.2、调用ik
我们调用fk来计算下:当机械臂,机械臂末端的位姿是x=0.03141308752246765, y=0.00020942581836905875, z=0.5517500187814817, roll=1.5728637148906415, pitch=-1.5707324948694676, yaw=-1.5728927150075942的时候,每个舵机的是多少。其实这里就是反推回去了,理论上结果应该是六个舵机的值都是90.0。终端输入以下指令,
xxxxxxxxxxros2 service call /get_kinemarics arm_interface/srv/ArmKinemarics "{tar_x: 0.03141308752246765, tar_y: 0.00020942581836905875, tar_z: 0.5517500187814817, roll: 1.5728637148906415, pitch: -1.5707324948694676, yaw: -1.5728927150075942, cur_joint1: 0.0, cur_joint2: 0.0, cur_joint3: 0.0, cur_joint4: 0.0, cur_joint5: 0.0, cur_joint6: 0.0, kin_name: 'ik'}"这里输入的值是xyz和rpy,cur_joint1-cur_joint6我们使用默认的就行,结果如下图所示,
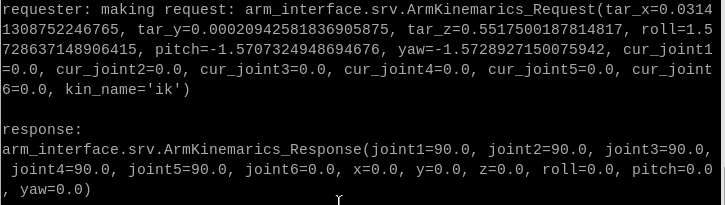
最后返回的response值是如下,
xxxxxxxxxxarm_interface.srv.ArmKinemarics_Response(joint1=90.0, joint2=90.0, joint3=90.0, joint4=90.0, joint5=90.0, joint6=0.0, x=0.0, y=0.0, z=0.0, roll=0.0, pitch=0.0, yaw=0.0)
这里只需要关注joint1-joint5的值,因为机械臂的末端是Gripping,连接到的是5号舵机,6号的舵机的值不在逆解算的范围,所以这里获取到的值[90.0,90.0,90.0,90.0,90.0],与机械臂当前的姿态下的每个舵机值一样,可认为逆解算出来的结果是正确的。
3、核心代码解析
程序代码路径:
树莓派5和Jetson-Nano主板
程序代码在运行的docker中。docker中的路径为
/root/yahboomcar_ws/src/arm_kin/src/kin_srv.cppOrin主板
程序代码路径为/home/jetson/yahboomcar_ws/src/arm_kin/src/kin_srv.cpp
主函数main,
xxxxxxxxxxint main(int argc,char **argv){ rclcpp::init(argc, argv); rcutils_logging_set_logger_level("kdl_parser", RCUTILS_LOG_SEVERITY_ERROR); auto node = rclcpp::Node::make_shared("kinemarics_arm"); //创建一个服务,服务名称是get_kinemarics,服务回调函数为handle_service auto service = node->create_service<arm_interface::srv::ArmKinemarics>("get_kinemarics", handle_service); rclcpp::spin(node); rclcpp::shutdown(); return 0; }服务回调函数handle_service,
xvoid handle_service( const std::shared_ptr<arm_interface::srv::ArmKinemarics::Request> request, std::shared_ptr<arm_interface::srv::ArmKinemarics::Response> response){ cout<<"-----------------"<<endl; cout<<request->kin_name<<endl; if (request->kin_name == "fk") { double joints[]{request->cur_joint1, request->cur_joint2, request->cur_joint3, request->cur_joint4, request->cur_joint5,request->cur_joint6}; // 定义目标关节角容器 vector<double> initjoints; // 定义位姿容器 vector<double> initpos; // 目标关节角度单位转换,由角度转换成弧度 for (int i = 0; i < 6; ++i) initjoints.push_back((joints[i] - 90) * DE2RA); //调用fk,获取目标位姿initpos arm_getFK(urdf_file, initjoints, initpos); response->x = initpos.at(0); response->y = initpos.at(1); response->z = initpos.at(2); response->roll = initpos.at(3); response->pitch = initpos.at(4); response->yaw = initpos.at(5); cout<<"-----------------"<<endl; } if (request->kin_name == "ik") { // 抓取的位姿 double Roll = request->roll ; double Pitch = request->pitch; double Yaw = request->yaw ; double x=request->tar_x; double y=request->tar_y; double z=request->tar_z; // 末端位置(单位: m) double xyz[]{x, y, z}; cout << x << y << z << endl; // 末端姿态(单位: 弧度) //double rpy[]{Roll * DE2RA, Pitch * DE2RA, Yaw * DE2RA}; double rpy[]{Roll , Pitch, Yaw }; // 创建输出角度容器 vector<double> outjoints; // 创建末端位置容器 vector<double> targetXYZ; // 创建末端姿态容器 vector<double> targetRPY; for (int k = 0; k < 3; ++k) targetXYZ.push_back(xyz[k]); for (int l = 0; l < 3; ++l) targetRPY.push_back(rpy[l]); // //调用fk,获取目标舵机角度outjoints arm_getIK(urdf_file, targetXYZ, targetRPY, outjoints); // 打印反解结果 for (int i = 0; i < 5; i++) cout << (outjoints.at(i) * RA2DE) + 90 << ","; cout << endl; a++; response->joint1 = (outjoints.at(0) * RA2DE) + 90; response->joint2 = (outjoints.at(1) * RA2DE) + 90; response->joint3 = (outjoints.at(2) * RA2DE) + 90; response->joint4 = (outjoints.at(3) * RA2DE) + 90; response->joint5 = (outjoints.at(4) * RA2DE) + 90; cout<<"-----------------"<<endl; }}