连接小车并且查看代码
本节内容介绍几种使用电脑连接小车的方式以及查看代码的方法。
本章节建议操作流程:连接小车热点/插入网线获取IP→查看OLED屏幕IP→VNC登录→关闭自发热点,连接自己的wifi(方便后续大模型功能运行)→查看OLED 更新后的IP→重新连接vnc→查看源码。
出厂镜像默认热点名称为:ROSMASTER 密码为:12345678 默认IP为:192.168.8.88。
1、连接小车
不论那种方式连接小车,电脑与小车都需要在同一个局域网下。满足在同一个局域网下最简单的条件就是连接同一个WiFi或热点,首先连接小车默认热点ROSMASTER,wifi 密码为12345678 连接成功后即可使用下列方式登录。
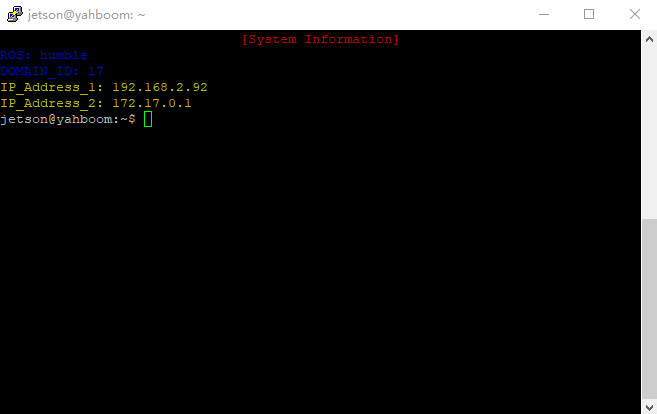
也可直接给主板连接上网线,连接网线后OLED屏幕也会自动更新IP地址,下文以连接网线后的IP来演示各项操作。
1.1、ssh连接(非必看,仅给需要使用的客户了解)
我们可以使用putty或者MobaXterm或者其它ssh登陆工具来连接小车,这里以putty为例,putty安装下载地址如下:Download PuTTY: latest release (0.83)
根据你的电脑版本进行选择安装,成功安装后,双击打开,putty界面如下图所示,
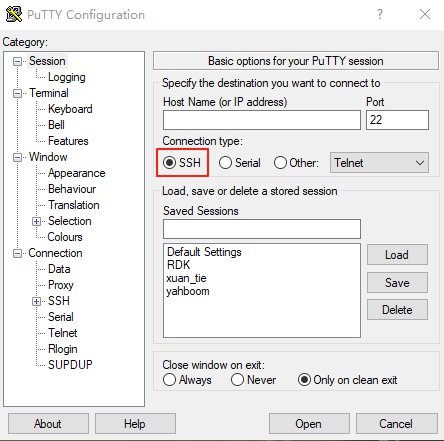
这里选择SSH,然后在Host Name(or IP address)栏中输入oled显示的ip地址,我这里的ip地址是192.168.2.92,那么就如下图所示输入ip地址,
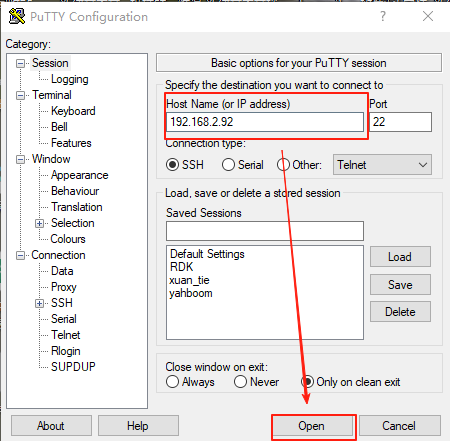
接着点击Open,会进入到一个终端界面和一个弹窗,我们点击Accept选择接收,如下图所示,
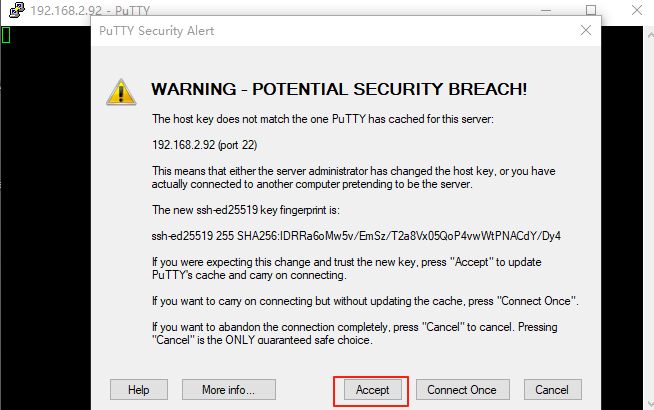
接着终端会显示login as,这里就输入小车主板的用户名,然后回车,接着会提示输入密码,然后我们输入密码,各个主板的用户名和密码如下:
| 主板 | 用户名 | 密码 |
|---|---|---|
| 树莓派5 | pi | yahboom |
| Jetson-Nano | jetson | yahboom |
| Orin-Nano | jetson | yahboom |
| Orin-NX | jetson | yahboom |
假设我这里的主板是Orin-Nano,那么就输入jetson,然后按下回车,然后再输入密码,输入密码时候是不显示任何内容的,输入yahboom,然后按下回车。
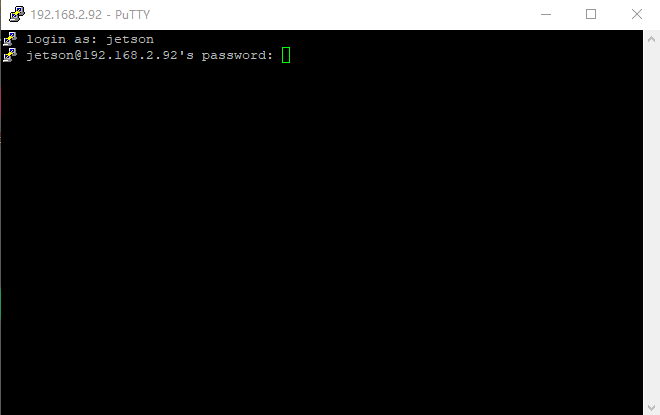
成功连接小车的界面如下,
这里只会打开一个终端,无法显示图像界面,所以,ssh适合不启动图像程序的时候登陆。
1.2、VNC登陆
1.2.1不带屏幕的orin 主板(不带屏幕的orin 主板用户可视化需要配置此章节,其余用户无需,直接进行1.2.2操作即可)
由于orin 主板系统为ubuntu 22.04 ,此系统进入可视化需要接入屏幕,未购买屏幕套餐的用户可能存在无法打开可视化的问题,在此提供一种虚拟桌面显示可视化的办法,仅给未给orin 主板连接屏幕的用户使用,购买了屏幕的orin 主板用户及jetson nano、树莓派用户可跳过此步骤。
打开资料-19.附件-虚拟桌面文件。将xorg.conf.backup_dp、xorg.conf.backup_vnc复制到/etc/X11 目录下。
安装虚拟桌面环境xserver-xorg-video-dummy:
sudo apt-get install xserver-xorg-video-dummy
打开终端,输入以下命令打开虚拟桌面,切换到VNC模式。
xxxxxxxxxxsudo cp /etc/X11/xorg.conf.backup_vnc /etc/X11/xorg.conf
重启系统,就可以在无屏幕的情况下进入桌面了(继续1.2.2教程连接vnc)。
xxxxxxxxxxsudo reboot
注意:切换到VNC模式后,DP连接线将失效(即使用屏幕连接主板也会无法显示),需要把配置修改回来才可以正常使用DP接口连接显示屏。
关闭虚拟桌面:
如果需要接DP显示屏,则打开终端,输入以下命令切换到DP接口连接显示屏模式。
xxxxxxxxxxsudo cp /etc/X11/xorg.conf.backup_dp /etc/X11/xorg.conf
重启系统,就可以使用DP线连接显示屏了。
xxxxxxxxxxsudo reboot
1.2.2
VNC允许用户通过网络远程访问和控制另一台计算机的桌面环境,所以当我们需要访问小车的桌面环境时候,比如我们要启动图像显示的时候,就可以用VNC来连接登陆小车。VNC的下载地址如下:Download VNC Viewer by RealVNC®
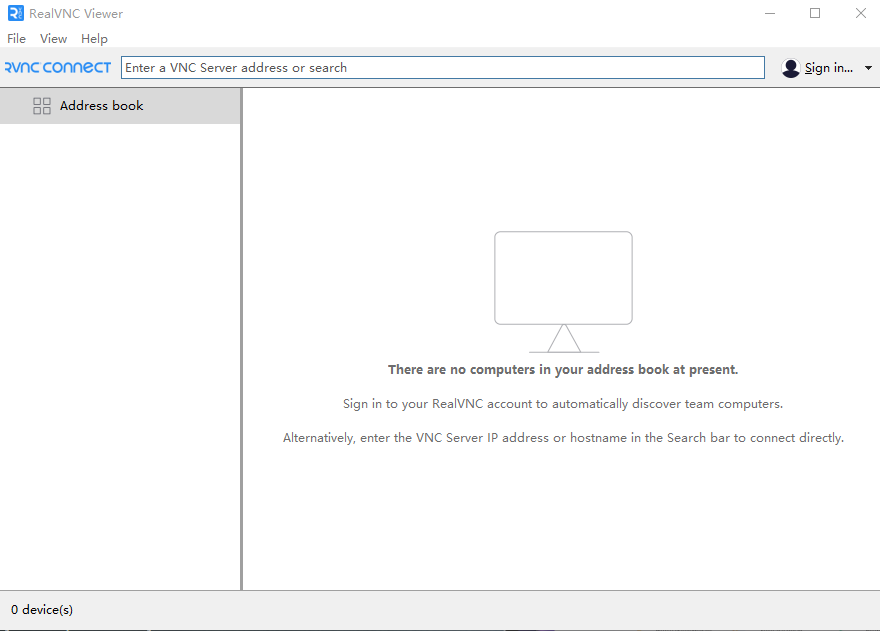
根据你的电脑版本来进行下载安装,成功安装后,双击打开,显示的画面如下,
输入小车的ip地址,这里我的ip地址是192.168.2.92,如下图所示,
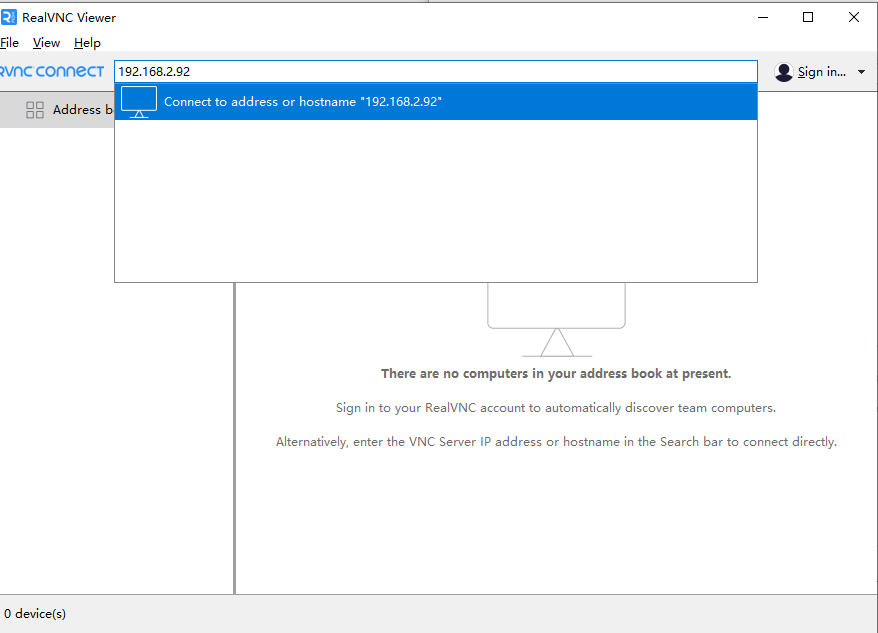
然后按下回车,
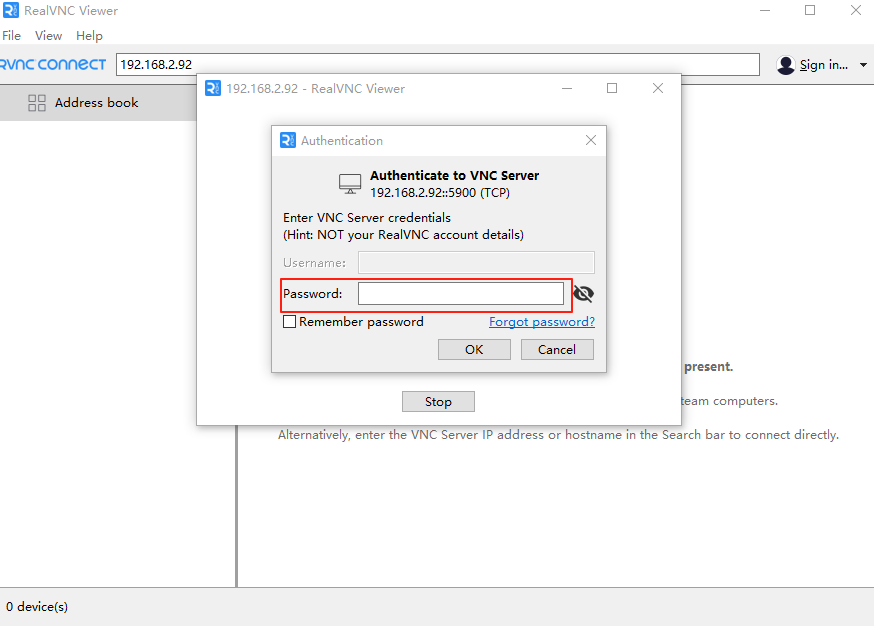
在Username中输入用户名,Password输入密码,参考1.1的表格,所有主板的密码都是yahboom,然后点击OK,就能进入桌面了,如下图所示,
如果显示异常画面,比如以下情况,
然后一直闪退,就需要如下图所示设置下,
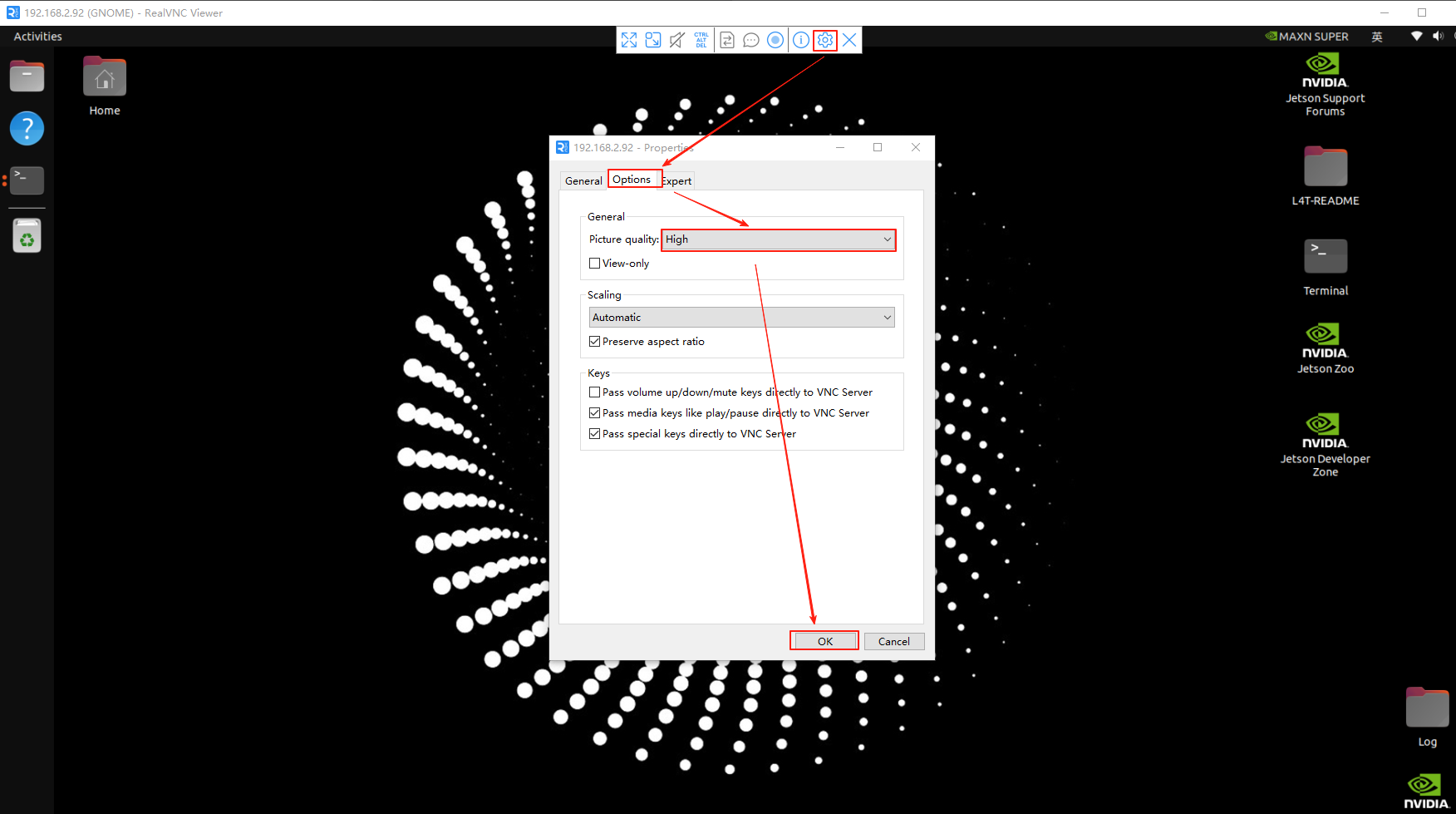
然后重新连接即可。Orin主板每次只能连接一个远程桌面。如果连接失败,需要检查下是否已经连接了远程桌面。
连接上之后,由于AI大模型都需要联网使用,自发热点只是局域网,无实际数据,所以需要切换网络,便于后面使用AI大模型功能
2、查看代码
Orin主板的代码是放在/home/jetson目录下的,所以,只要我们能够连接小车,就能够看到代码;树莓派5和jetson-nano主板的代码,是放在启动的docker容器中,所以我们需要先进入容器,才能看到代码。
以下介绍几种查看代码的方法,方便我们后续编辑、修改代码。
2.1、jupyter-lab
2.1.1:Orin主板(不建议使用jupyter-lab查看修改代码)
开机后会直接启动jupyter-lab,所以只需要在浏览器中,输入ip+:8888即可使用jupyter来查看代码,我这里的ip地址是192.168.2.92,那么我就在浏览器中输入以下内容,

然后按下回车,显示输入密码,同样的输入yahboom,然后就可以进入到jupyter-lab的界面,如下图所示,
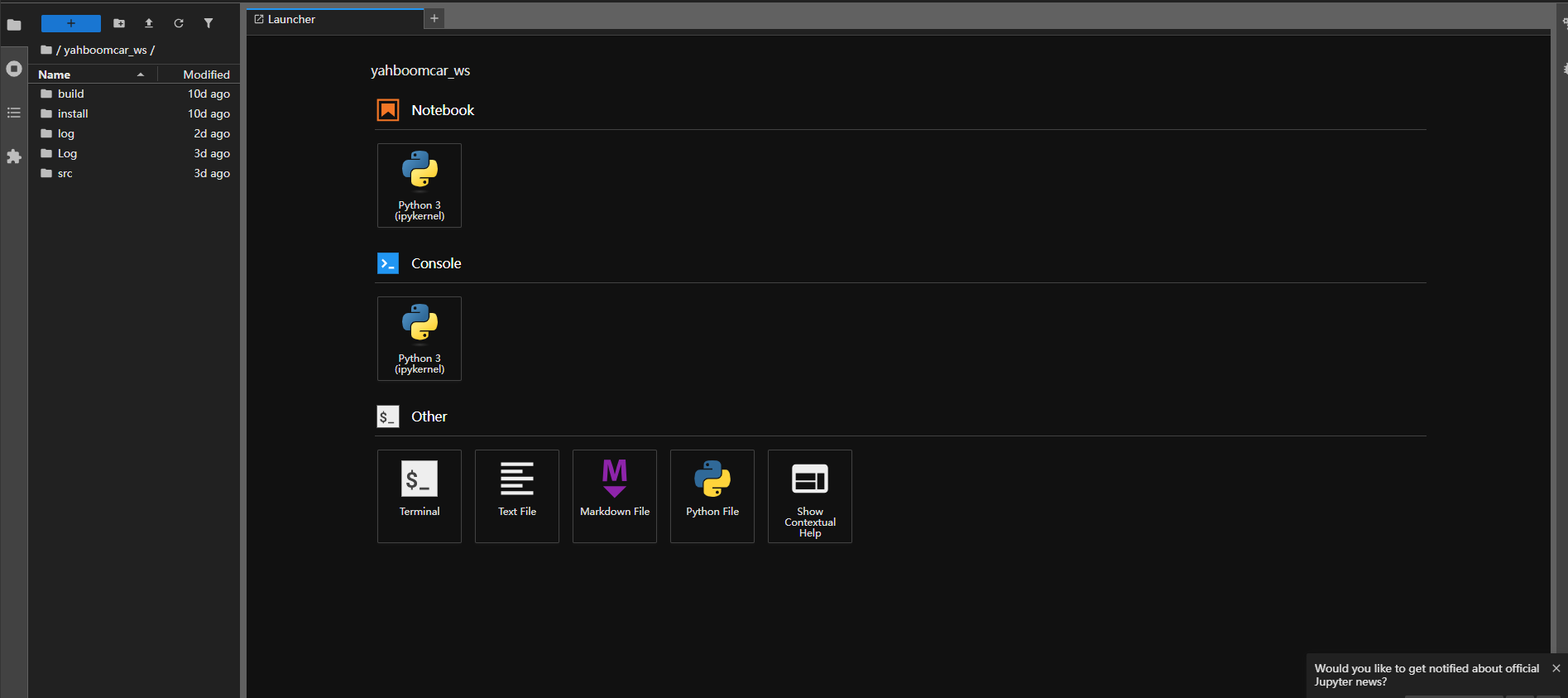
选择左边的文件夹里边的内容即可查看代码。
2.1.2树莓派5以及Jetson-Nano主板:
需要进入到docker容器中,然后输入指令jupyter-lab --allow-root,然后在浏览器中输入小车ip+:8888,即可启动jupyter-lab中查看小车的代码,如下图所示,我的进入小车容器中,然后cd到/root目录下,然后在终端输入jupyter-lab --allow-root,
然后在浏览器输入小车的ip+:8888,我这里树莓派主板的ip是192.168.2.22,那就输入192.168.2.22:8888,如下图所示,

按下回车,如果需要输入密码,那就输入yahboom,即可进入jupyter-lab中查看代码。