控制板简介
一、控制板正面元件分布示意图
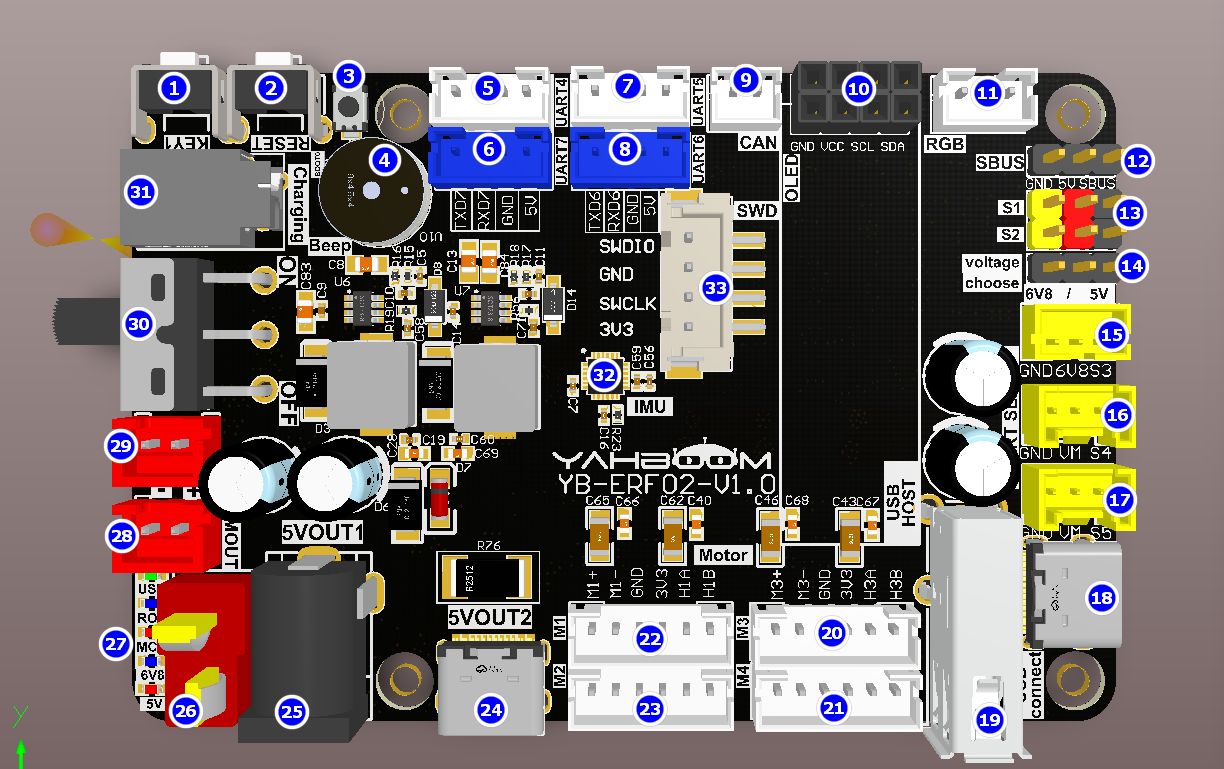
- KEY1键:用户功能按键,可通过编程实现自定义功能。
- RESET键:复位STM32单片机。
- BOOT0键:烧录STM32固件时用于进入烧录模式。
- 有源蜂鸣器:鸣笛和低电量报警等功能。
- 左雷达接口:串口4,连接左后雷达。
- 调试接口:串口7,可连接TTL模块,查看log信息。
- 右雷达接口:串口5,连接右前雷达。
- 控制接口:串口6,可连接TTL模块,发送协议控制机器人。
- CAN接口:可接入CAN总线设备,发送协议控制机器人。
- OLED屏接口:可以显示板子的状态
- RGB灯条接口:显示灯条颜色状态
- SBUS接口:连接SBUS航模遥控器
- PWM舵机接口:连接PWM舵机
- PWM舵机电压切换:PWM舵机电压可以选择5V或者6.8V
- 6.8V串口舵机接口:连接6.8V的串口舵机
- 12V串口舵机接口:连接12V的串口舵机
- 12V串口舵机接口:连接12V的串口舵机
- 通讯和固件烧录接口:TYPE-C串口烧录单片机固件和数据通讯
- 手柄接口:连接USB手柄
- M3电机:连接小车右前方电机
- M4电机:连接小车右后方电机
- M1电机:连接小车左前方电机
- M2电机:连接小车左后方电机
- Type-C 5V输出接口:5.1V\5A输出,带有树莓派专属协议
- DC 5V输出接口:提供5V电压输出
- T型DC 12V电源输入接口:接入12V电源,给主板供电
- LED指示灯:显示电压和功能的LED指示灯
- DC12V电源输出:提供12V电压输出
- DC12V电源输出:提供12V电压输出
- 电源开关:控制整个板子的开关,开关拨到OFF为关机,拨到ON为开机
- 充电接口:12.6V充电接口
- 九轴姿态传感器:包含3轴加速度计、3轴陀螺仪、3轴磁力计
- SWD调试接口:用户可使用ST-LINK进行调试
二、控制板背面元件分布示意图
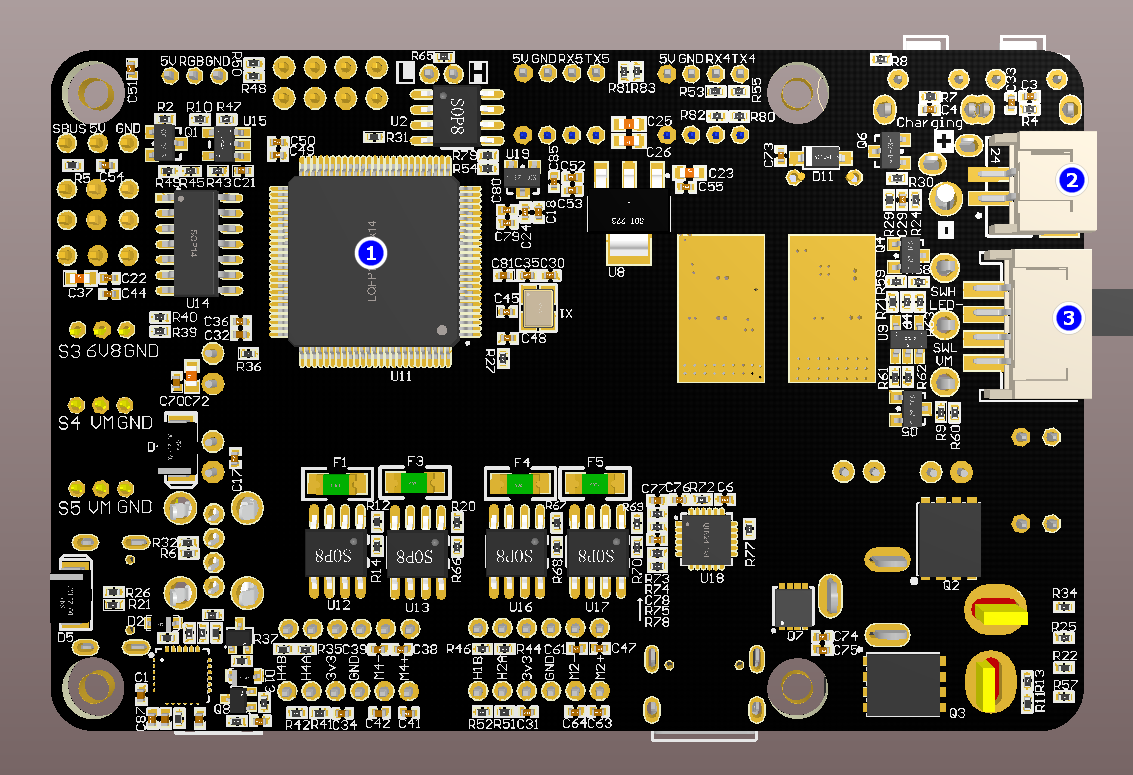
- STM32单片机:主芯片,控制整个板子的功能运行
- 充电接口:12.6V充电接口
- 自锁开关接口:可用于外接一个自锁开关,控制整个板子的开关
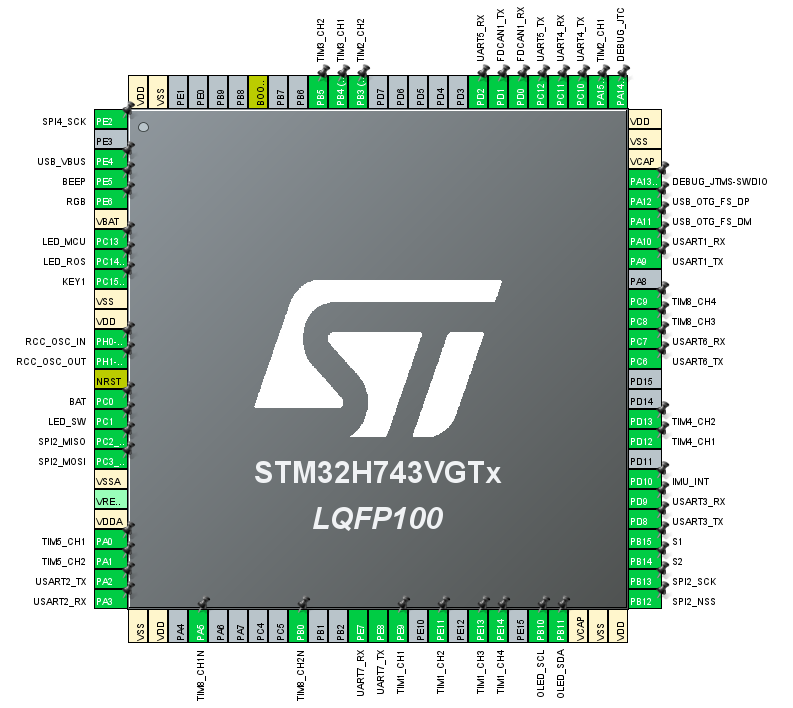
三、控制板引脚分配示意图
| 外设功能 | 引脚 | 备注 |
|---|---|---|
| 有源蜂鸣器 | PE5 | 普通GPIO |
| RGB灯条 | PE6 | SPI4_MOSI(SPI4_SCK为SPI4时钟,不需要用到,已悬空处理) |
| LED_MCU指示灯 | PC13 | 普通GPIO,状态指示灯 |
| LED_ROS指示灯 | PC14 | 普通GPIO,ROS状态指示灯 |
| KEY1按键 | PC15 | 普通GPIO,输入上拉 |
| 25M晶振 | PH0/PH1 | |
| BAT电源电压检测 | PC0 | ADC检测 |
| LED_SW指示灯 | PC1 | 普通GPIO,开关指示灯 |
| IMU姿态传感器 | PC2/PC3/PB13/PB12/PD10 | SPI2-MISO/MOSI/SCK/NSS/INT |
| M3电机编码器 | PA0/PA1 | 编码器模式,定时器5通道1和通道2 |
| SBUS接口 | PA3 | 串口2接收引脚(PA2为串口2发送引脚,不需要用到,已悬空处理) |
| M3电机驱动 | PA5/PB0 | PWM输出模式,定时器8通道1N和通道2N |
| 调试接口 | PE7/PE8 | 串口7,打印log信息 |
| M2电机驱动 | PE9/PE11 | PWM输出模式,定时器1通道1和通道2 |
| M1电机驱动 | PE13/PE14 | PWM输出模式,定时器1通道3和通道4 |
| OLED显示屏 | PB10/PB11 | I2C接口 |
| PWM舵机S1 | PB15 | 定时器12通道2 |
| PWM舵机S2 | PB14 | 定时器12通道1 |
| 总线舵机 | PD8/PD9 | 串口3 |
| M4电机编码器 | PD12/PD13 | 编码器模式,定时器4通道1和通道2 |
| 控制接口 | PC6/PC7 | 串口6 |
| M4电机驱动 | PC8/PC9 | PWM输出模式,定时器8通道3和通道4 |
| 烧录和通讯接口 | PA9/PA10 | 串口1 |
| USB手柄接口 | PA11/PA12 | USB主机 |
| SWD接口 | PA13/PA14 | SWDIO/SWCLK |
| M2电机编码器 | PA15/PB3 | 编码器模式,定时器2通道1和通道2 |
| 左边雷达接口 | PC10/PC11 | 串口4 |
| 右边雷达接口 | PC12/PD2 | 串口5 |
| CAN接口 | PD0/PD1 | |
| M1电机编码器 | PB4/PB5 | 编码器模式,定时器3通道1和通道2 |
四、常见问题分析
- 主控板(如:Jetson Nano等)怎么驱动控制板?如何与控制板通讯?
答:控制板出厂固件集成microros框架程序,Jetson Nano通过USB Connect接口连接到控制板,打开microros代理并发送对于话题指令,控制板上集成了单片机,接收并解析数据,再处理具体要执行的命令。
- 机器人如何供电?主控板需要另外供电吗?
答:小车出厂配有电池组,将电池组插入控制板的DC 12V电源T型接口上,打开总电源开关,控制板集成电压转化芯片。对于Jetson Nano主板,通过DC 5V电源线供电。对于树莓派5,通过带协议的type-C 5V输出电源线供电。对于Jetson Orin系列,通过DC 12V输出电源线供电。
- 控制如何更新单片机固件?为什么要更新单片机固件?
答:控制板集成的单片机出厂时已经烧录好固件,非必要情况下请无需更新固件。如果需要更新固件,请参考更新固件的教程来操作更新单片机的固件。如果控制板烧录过单独例程的hex文件,要进行小车ROS案例前,请重新烧录回出厂固件,再进行ROS案例。