雷达简介与使用
1、雷达简介
1.1、T-mini Plus雷达
本产品使用的雷达是T-mini Plus,这是一款360°2D激光雷达。T-mini Plus基于脉冲 ToF 测距原理,并配以相关光学、电学、算法设计,实现高频高精度的距离测量,同时,机械结构 360 度旋转,不断获取角度信息,从而实现了 360 度扫描测距,输出扫描环境的点云数据。
1.2、雷达特性
- 360 度全方位扫描,6-12Hz 可调扫描频率
- 高速测距,测距频率 4000Hz
- 测距误差小,测距稳定性好
- 抗环境光干扰能力强
- Class I 人眼安全标准
1.3、性能参数
| 项目 | 值 | 单位 |
|---|---|---|
| 测距频率 | 4000 | Hz |
| 扫描频率 | 6(6-12) | Hz |
| 测距范围 | 0.05-12 | m |
| 扫描角度 | 0-360 | Deg |
| 测距精度 | 20 | mm |
| 角度分辨率 | 0.54 | Deg |
| 俯仰角 | 0-1.5 | Deg |
2、使用雷达
在本产品中,使用了一块ROS拓展板来驱动两个雷达。小车启动agent代理后,会启动底层控制节点,这个节点会发布两个雷达的话题分别是/scan0和/scan1。小车左后边的雷达为/scan0,小车右前边的雷达为/scan1。小车启动agent代理后,终端输入以下指令查看雷达数据,以查看/scan1为例,
ros2 topic echo /scan0
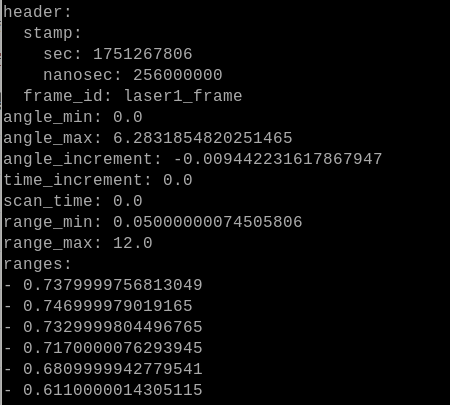
一帧数据如上图所示,其中,
- frame_id:表示的是雷达的坐标系名称。
- angle_min和angle_max:表示的雷达扫描的最小弧度和最大弧度,这里换算成角度就是0度到360度。
- angle_increment:表示的是角度的增量。
- range_min和range_max:表示的是雷达扫描的最小距离和最大距离,单位是米,这里最小距离是0.05米,最大是12.0米。
- ranges:表示的是在雷达扫描的范围内,每个角度扫描到的距离,单位是米。
也可以借助RVIZ来可视化雷达的点云数据,以在虚拟机中查看/scan1的点云数据为例,首先,虚拟机与小车需要处在同一个局域网且两者的ROS_DOMAIN_ID一致,然后,在虚拟机中输入以下指令启动rviz,
xxxxxxxxxxrviz2

启动rviz后,如上图所示,添加/scan1的话题,然后接着修改左边的【Global Options】-【Fixed Frame】的值,修改成laser1_frame,然后在rviz中就能看到/scan1的点云数据,如下图所示,

白色部分就是右前方雷达的点云数据。