雍容雅步
1.学习目标
本次课程我们主要学习如何通过MakeCode图形化编程,让双足机器人前进。
2.积木搭建
积木搭建步骤详见资料中【组装课程】--【双足机器人】的安装图纸或者积木安装画册。
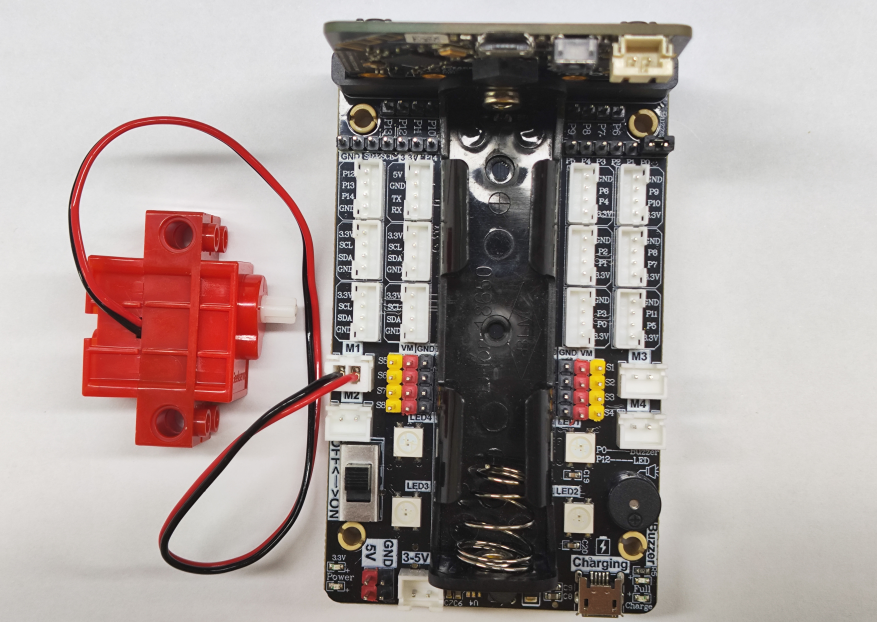
3.电机接线
小车左边电机接线插入Super:bit扩展板M1接口,黑线靠近电池一侧;
如下图所示:
4.编程
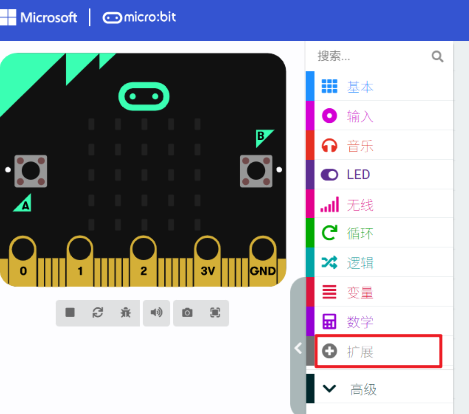
方式一 在线编程:
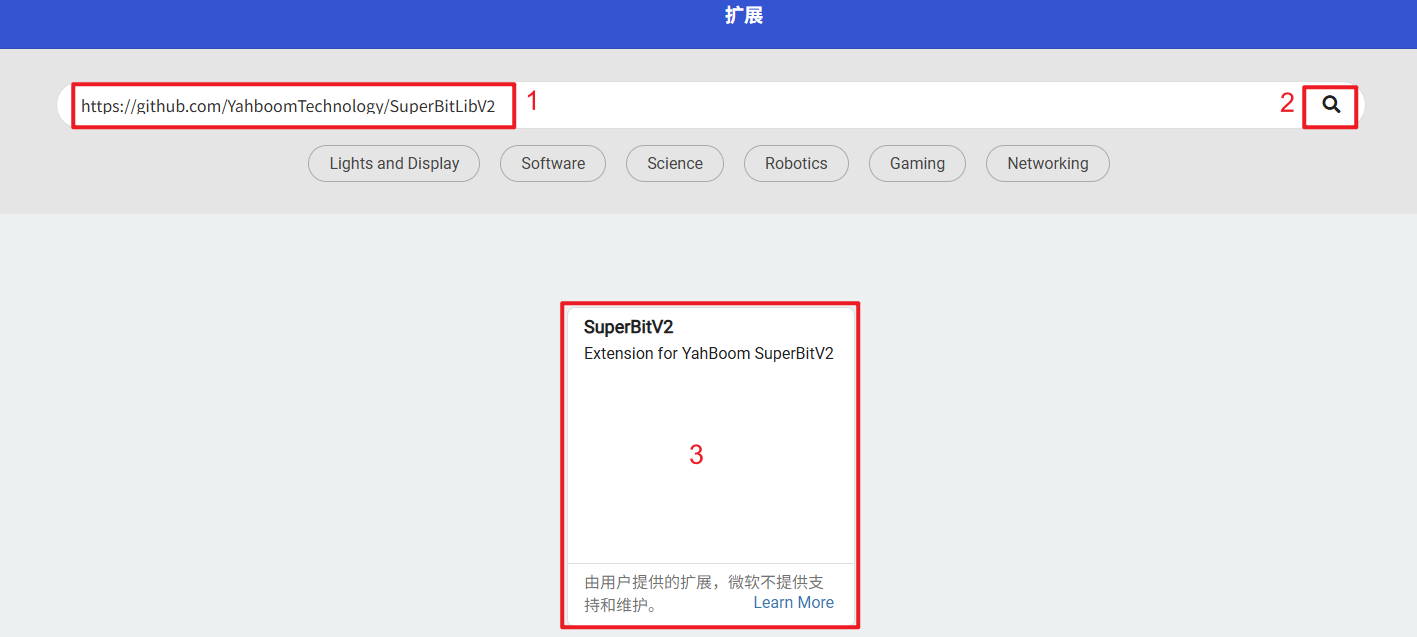
首先将micro:bit通过USB数据线连接电脑,电脑会弹出一个U盘,点击U盘里的网址: https://makecode.microbit.org/进入编程界面。然后,添加亚博智能软件包https://github.com/YahboomTechnology/SuperBitLibV2,即可进行编程。
方式二 离线编程:
打开离线编程软件MakeCode,进入编程界面。点击【新建】然后添加亚博智能软件包https://github.com/YahboomTechnology/SuperBitLibV2,即可进行编程。
4.1 添加扩展包
4.2 所用积木
本次编程所需积木块的位置如下图所示。


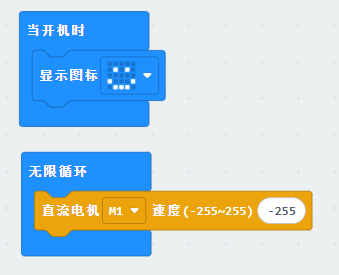
4.3 组合积木
汇总程序如下图所示。
也可以直接打开本实验提供的 microbit-雍容雅步.hex 文件拖进打开网址的浏览器,则会自动打开本工程源码的程序图
5.实验现象
程序下载成功以后,打开电源开关,micro:bit点阵上会显示爱心图案,双足机器人会保持前进的状态。