4.振动提示器
一、学习目标
1.学习树莓派Pico 2/Pico主板的引脚基本使用。
2.了解如何驱动振动马达模块。
二、实验前准备
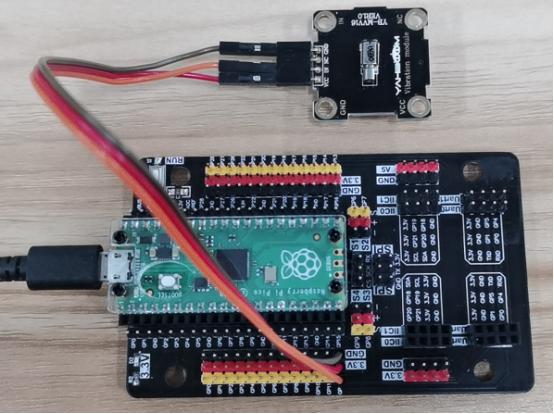
本次课程总共需要准备的物品包括:Pico 2/Pico开发板、扩展板、电脑、USB数据线、振动马达模块、三根公对母杜邦线。
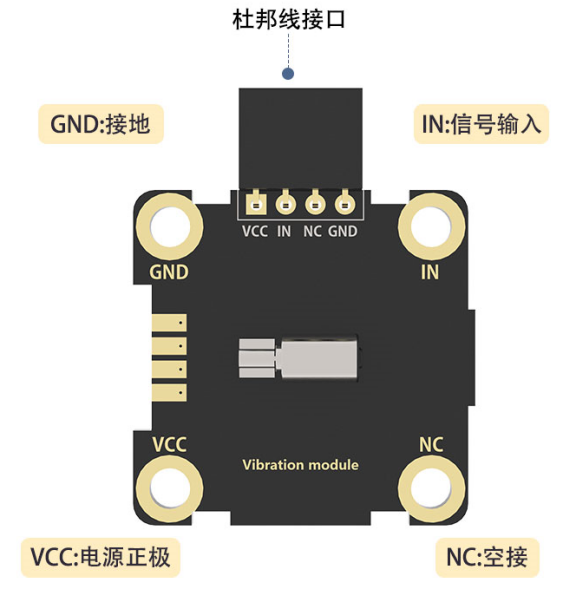
振动马达模块只需要给IN信号引脚供高电平,马达就会转起来,可以通过修改高低电平的时间,从而改变振动马达的振动时间。
将振动马达模块的IN引脚连接到扩展板上GP12口。最后将USB数据线连接到Pico 2/Pico和电脑USB口。
三、程序分析
Thonny编程
关于ThonnyIDE的使用,请查看前面环境搭建相关课程。
xfrom machine import Pinimport utime# 初始化振动马达模块shake = Pin(12, Pin.OUT)# 震动传感器开启震动# on_time是打开的时间,delay_time是关闭后的延迟时间。# 时间单位都为毫秒,正整数。def shake_on(on_time, delay_time):shake.value(1)utime.sleep_ms(on_time)shake.value(0)utime.sleep_ms(delay_time)# 循环:三次短振一次长振while True:shake_on(100, 100)shake_on(100, 100)shake_on(100, 300)shake_on(500, 1000)
四、实验现象
点击Thonny IDE绿色运行键 开始运行程序。点击红色停止键
开始运行程序。点击红色停止键 停止程序。
停止程序。
程序运行时,振动马达模块会循环振动,频率是三次短振一次长振。短振时间为100毫秒,长振时间为500毫秒。