快速上手
教程演示如何快速体验平衡车的蓝牙遥控功能。
1、BalanceBot
使用手机浏览器扫描二维码下载BalanceBot APP(仅支持安卓)

2、组装平衡车
按照组装视频,检查平衡车所有硬件安装和连接是否正确。
3、下载程序
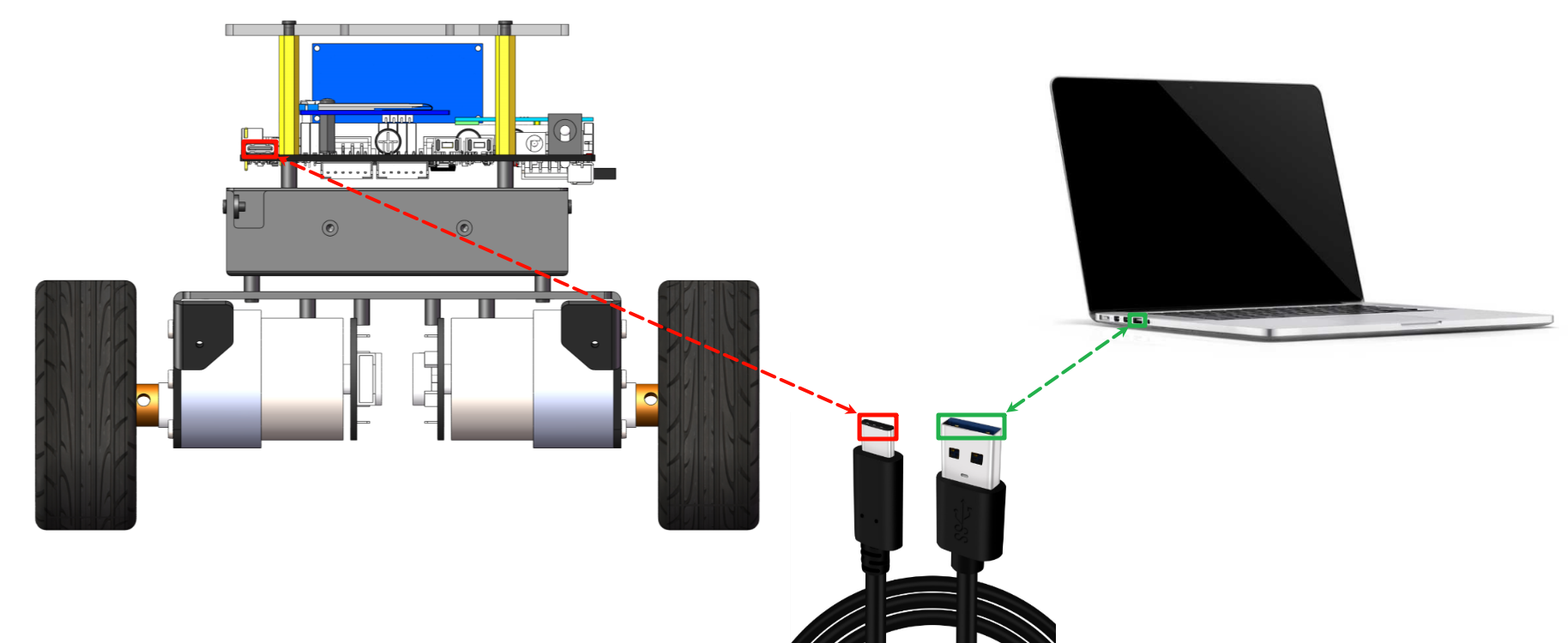
设备连接
使用Type-C数据线连接电脑USB接口和开发板的Type-C烧录接口:
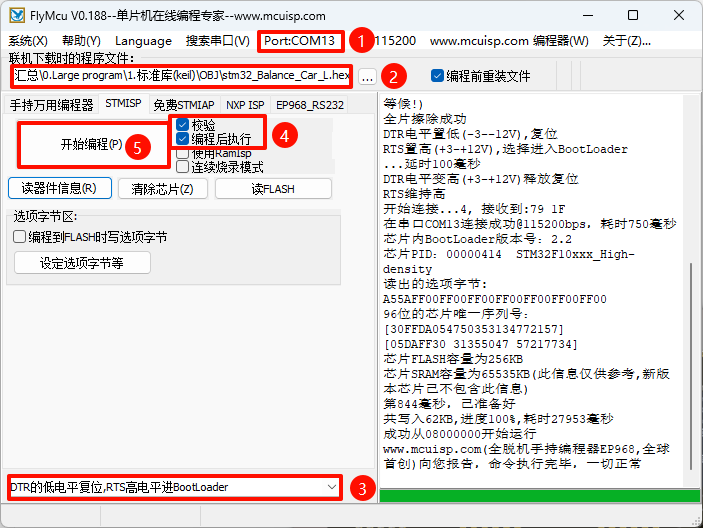
程序下载
将Large program工程的stm32_Balance_Car_L.hex文件通过FlyMCU软件烧录到开发板:stm32_Balance_Car_L.hex文件文件位于工程的OBJ文件夹下。
产品配套资料软件路径:附件 → 软件工具 → FlyMcu.zip产品配套资料源码路径:附件 → 源码汇总 → 0.Large program → 1.标准库(keil)
4、程序启动
程序下载到开发板后,打开拓展板电源开关;程序启动后,OLED会显示当前功能模式。
模式切换
转动任意电机轮胎可以切换模式的选择。
模式选择
KEY1按键用于确定模式选择和控制启动。
功能模式说明
注意:快速上手只演示蓝牙控制功能,其它功能模式需要安装对应拓展配件,详细使用可以看【平衡车进阶玩法】教程。
| 功能模式 | 说明 |
|---|---|
| 1.Standard Mode | 标准模式:蓝牙控制 |
| 2.UT Follow | 超声波跟随模式 |
| 3.UT Avoid | 超声波避障模式 |
| 4.Load Movement | 负重模式:蓝牙控制 |
| 5.Handle Control | 2.4G无线手柄控制模式 |
| 6.IR Track | 四路巡线模式 |
| 7.Adv IR Track | 高难度四路巡线模式 |
| 8.K210 QR Rec | K210二维码识别模式 |
| 9.K210 Track | K210巡线模式 |
| 10.K210 Follow | K210跟随模式 |
| 11.K210 Self Learn | K210自主学习模式 |
| 12.K210 Num Rec | K210数字识别模式 |
| 13.LiDAR Avoid | 雷达避障模式 |
| 14.LiDAR Follow | 雷达跟随模式 |
| 15.LiDAR Guard | 雷达警卫模式 |
| 16.LiDAR Patrol | 雷达巡逻模式 |
| 17.LiDAR StrLine1 | 雷达走直线模式 |
| 18.LiDAR StrLine2 | 雷达沿墙边模式 |
| 19.CCD Track | CCD巡线模式 |
| 20.EM Track | 电磁巡线模式 |
5、蓝牙遥控
进行蓝牙遥控前,我们需要安装好BalanceBot APP。
蓝牙连接
首次打开BalanceBot APP会自动搜索并连接附近的蓝牙设备,我们需要将手机靠近小车,BalanceBot APP会自动进行连接;连接成功会出现”连接成功“提示。
若没有搜索到,可以依次点击蓝牙搜索和连接选项。
xxxxxxxxxx注意事项:手机需要开启蓝牙功能并允许蓝牙遥控APP相关权限

主控界面
用于平衡车的基础控制和数据显示。

方向控制
主控界面可以通过按键、重力以及摇杆控制平衡车运动。
数据显示
主控界面会自动获取重力、超声波距离、电池电压、左右电机速度显示。
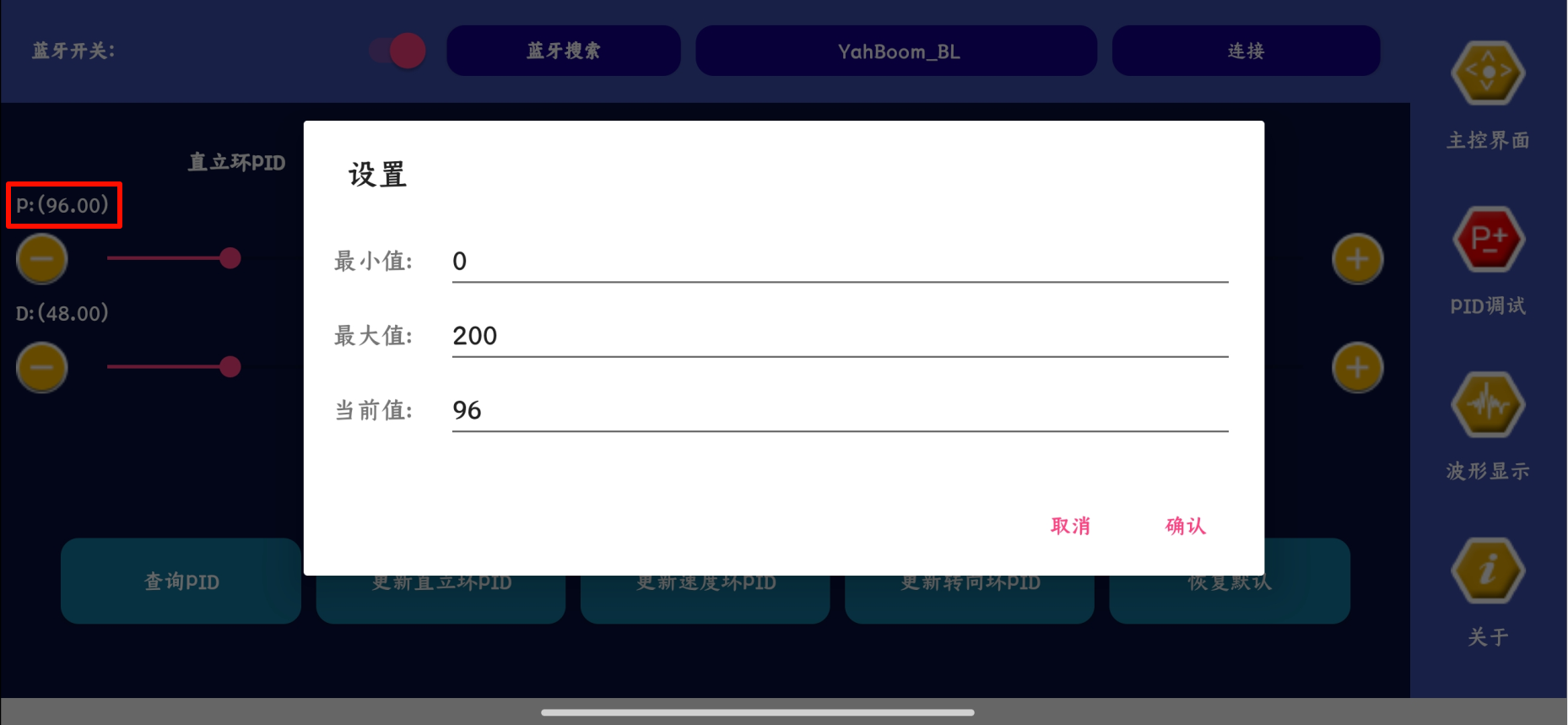
PID调试
用于在线查询和调整PID参数,实现最佳效果。

直立环
调整直立环PD参数,支持拖动和按键更新数据。
速度环
调整速度环PI参数,支持拖动和按键更新数据。
转向环
调整转向环PD参数,支持拖动和按键更新数据。
PID参数范围
点击界面的P、I、D选项,可以调整各个PID参数的调整范围。
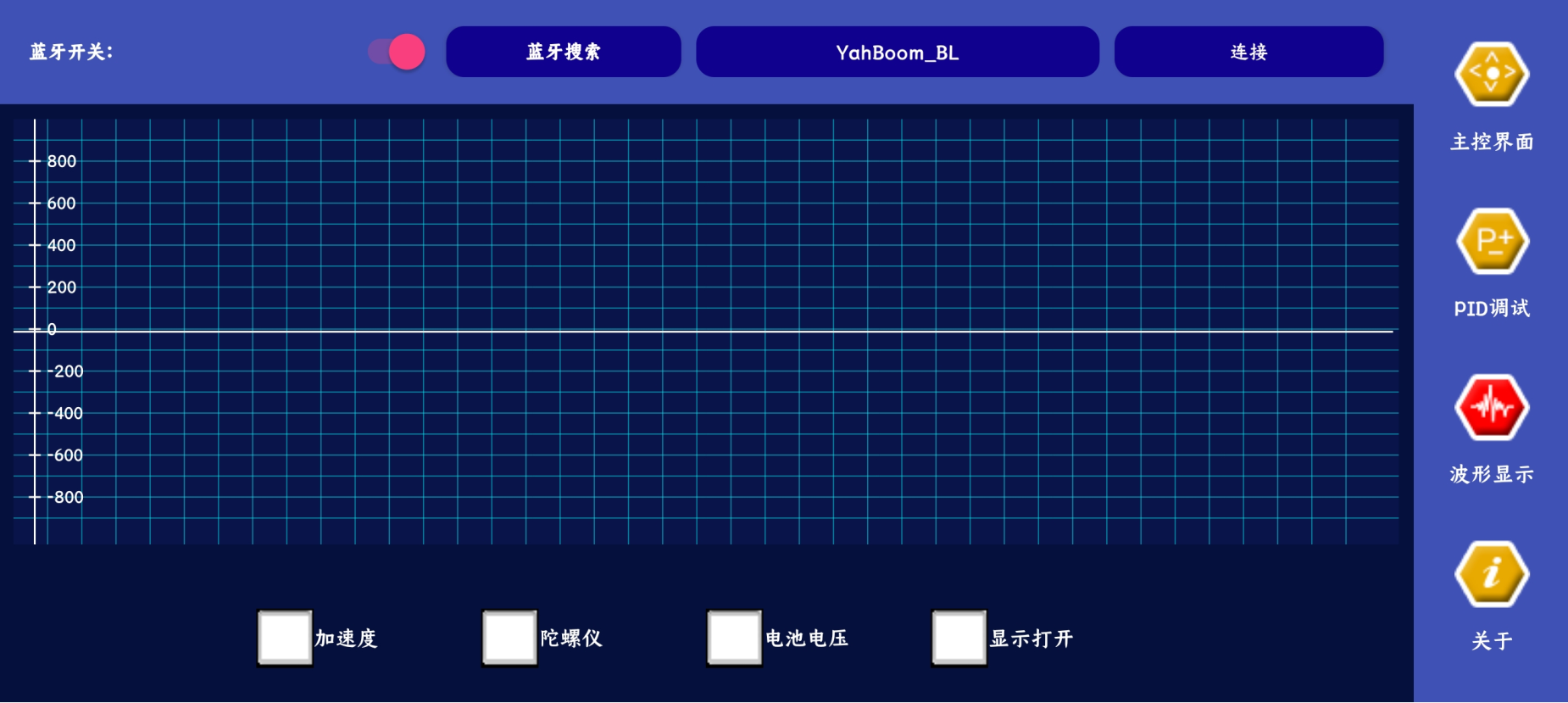
波形显示
勾选对应选项可以显示加速度、陀螺仪、电池电压的数据动态变化。