2、docker镜像容器常用命令
操作环境及软硬件参考配置如下:
参考车型:ROSMASTER X3
机器人硬件配置:Arm系列主控,思岚A1激光雷达,AstraPro Plus深度相机
机器人系统:Ubuntu(版本无要求)+ docker(20.10.21及以上版本)
PC虚拟机:Ubuntu(20.04)+ ROS2(Foxy)
使用场景:在相对干净的2D平面上使用
2.1、不使用sudo命令
通常情况下,操作docker命令,需要加上前缀sudo,如下:
xxxxxxxxxxsudo docker version
但是添加docker用户组之后,就可以不用加sudo前缀了。docker用户组的添加方法(在运行docker的宿主机内运行命令):
xxxxxxxxxxsudo groupadd docker # 添加docker用户组sudo gpasswd -a $USER docker # 将当前用户添加至docker用户组,其中$USER可以自动解析到当前登陆的用户newgrp docker # 更新docker用户组
添加上述命令之后,使用【docker images】命令测试,如果没报错,说明已经可以不使用sudo命令了。如果报如下错误:
xxxxxxxxxxpi@ubuntu:~$ docker imagesWARNING: Error loading config file: /home/pi/.docker/config.json: open /home/pi/.docker/config.json: permission denied
则在宿主机中执行如下命令解决:
xxxxxxxxxxsudo chown "$USER":"$USER" /home/"$USER"/.docker -Rsudo chmod g+rwx "/home/$USER/.docker" -R
2.2、帮助命令
xxxxxxxxxxdocker info # 显示 Docker 系统信息,包括镜像和容器数。。docker --help # 帮助
2.3、镜像命令
1、docker pull 下载镜像
xxxxxxxxxx# 下载镜像jetson@ubuntu:~$ docker pull ubuntuUsing default tag: latest # 不写tag,默认是latestlatest: Pulling from library/ubuntucd741b12a7ea: Pull complete # 分层下载Digest: sha256:67211c14fa74f070d27cc59d69a7fa9aeff8e28ea118ef3babc295a0428a6d21Status: Downloaded newer image for ubuntu:latestdocker.io/library/ubuntu:latest # 真实位置
2、docker images 列出镜像
xxxxxxxxxx# 列出本地主机上的镜像jetson@ubuntu:~$ docker imagesREPOSITORY TAG IMAGE ID CREATED SIZEyahboomtechnology/ros-foxy 3.4.0 49581aa78b6b About an hour ago 24.3GByahboomtechnology/ros-foxy 3.3.9 cefb5ac2ca02 3 days ago 20.5GByahboomtechnology/ros-foxy 3.3.8 49996806c64a 4 days ago 20.5GByahboomtechnology/ros-foxy 3.3.7 8989b8860d17 4 days ago 17.1GByahboomtechnology/ros-foxy 3.3.6 326531363d6e 5 days ago 16.1GBhello-world latest 46331d942d63 13 months ago 9.14kB# 解释REPOSITORY 镜像的仓库源TAG 镜像的标签IMAGE ID 镜像的IDCREATED 镜像创建时间SIZE 镜像大小# 同一个仓库源可以有多个TAG,代表这个仓库源的不同版本,我们使用REPOSITORY:TAG 定义不同的镜像,如果你不定义镜像的标签版本,docker将默认使用 lastest镜像!# 可选项-a: 列出本地所有镜像-q: 只显示镜像id--digests: 显示镜像的摘要信息
3、docker search 搜索镜像
xxxxxxxxxx# 搜索镜像jetson@ubuntu:~$ docker search ros2NAME DESCRIPTION STARS OFFICIAL AUTOMATEDosrf/ros2 **Experimental** Docker Images for ROS2 deve… 60 [OK]tiryoh/ros2-desktop-vnc A Docker image to provide HTML5 VNC interfac… 11althack/ros2 An assortment of development containers for … 7tiryoh/ros2 unofficial ROS2 image 6athackst/ros2 [Deprecated-> use althack/ros2] 5uobflightlabstarling/starling-mavros2 ROS2 version of MAVROS 2theosakamg7/ros2_java_docker Image base 1 [OK]# docker search 某个镜像的名称 对应DockerHub仓库中的镜像# 可选项--filter=stars=50 : 列出收藏数不小于指定值的镜像。
4、docker rmi 删除镜像
xxxxxxxxxx# 删除镜像docker rmi -f 镜像id # 删除单个docker rmi -f 镜像名:tag 镜像名:tag # 删除多个docker rmi -f $(docker images -qa) # 删除全部
2.4、容器命令
有镜像才能创建容器,我们这里使用 ubuntu 的镜像来测试,下载镜像:
xxxxxxxxxxdocker pull ubuntu
1、docker run 运行镜像启动容器
xxxxxxxxxx# 命令docker run [OPTIONS] IMAGE [COMMAND][ARG...]# 常用参数说明--name="Name" # 给容器指定一个名字-d # 后台方式运行容器,并返回容器的id!-i # 以交互模式运行容器,通过和 -t 一起使用-t # 给容器重新分配一个终端,通常和 -i 一起使用-P # 随机端口映射(大写)-p # 指定端口映射(小结),一般可以有四种写法ip:hostPort:containerPortip::containerPorthostPort:containerPort (常用)containerPort#测试jetson@ubuntu:~$ docker imagesREPOSITORY TAG IMAGE ID CREATED SIZEyahboomtechnology/ros-foxy 3.4.0 49581aa78b6b 2 hours ago 24.3GByahboomtechnology/ros-foxy 3.3.9 cefb5ac2ca02 3 days ago 20.5GByahboomtechnology/ros-foxy 3.3.8 49996806c64a 4 days ago 20.5GByahboomtechnology/ros-foxy 3.3.7 8989b8860d17 4 days ago 17.1GByahboomtechnology/ros-foxy 3.3.6 326531363d6e 5 days ago 16.1GBubuntu latest bab8ce5c00ca 6 weeks ago 69.2MBhello-world latest 46331d942d63 13 months ago 9.14kB#使用ubuntu进行用交互模式启动容器,在容器内执行/bin/bash命令!jetson@ubuntu:~$ docker run -it ubuntu:latest /bin/bashroot@c54bf9efae47:/# lsbin boot dev etc home lib media mnt opt proc root run sbin srv sys tmp usr varroot@c54bf9efae47:/# exit # 使用 exit 退出容器回到宿主机exitjetson@ubuntu:~$
2、docker ps 列出所有运行的容器
xxxxxxxxxx# 命令docker ps [OPTIONS]# 常用参数说明-a # 列出当前所有正在运行的容器 + 历史运行过的容器-l # 显示最近创建的容器-n=? # 显示最近n个创建的容器-q # 静默模式,只显示容器编号。#测试jetson@ubuntu:~$ docker ps -aCONTAINER ID IMAGE COMMAND CREATED STATUS PORTS NAMESc54bf9efae47 ubuntu:latest "/bin/bash" 2 hours ago Up 4 seconds funny_hugle3b9c01839579 hello-world "/hello" 3 hours ago Exited (0) 3 hours ago jovial_brown
3、退出容器
xxxxxxxxxxexit # 容器停止退出ctrl+P+Q # 容器不停止退出
4、多终端进入正在运行的容器
xxxxxxxxxx# 命令1docker exec -it 容器id bashShell# 测试jetson@ubuntu:~$ docker ps -aCONTAINER ID IMAGE COMMAND CREATED STATUS PORTS NAMESc54bf9efae47 ubuntu:latest "/bin/bash" 2 hours ago Up 4 seconds funny_hugle3b9c01839579 hello-world "/hello" 3 hours ago Exited (0) 3 hours ago jovial_brownjetson@ubuntu:~$ docker exec -it c5 /bin/bash # 容器的id可以简写,只要是能唯一标识这个容器就行root@c54bf9efae47:/## 命令2docker attach 容器id# 测试jetson@ubuntu:~$ docker ps -aCONTAINER ID IMAGE COMMAND CREATED STATUS PORTS NAMESc54bf9efae47 ubuntu:latest "/bin/bash" 2 hours ago Up 35 seconds funny_hugle3b9c01839579 hello-world "/hello" 3 hours ago Exited (0) 3 hours ago jovial_brownjetson@ubuntu:~$ docker attach c5 # 容器的id可以简写,只要是能唯一标识这个容器就行root@c54bf9efae47:/## 区别# exec 是在容器中打开新的终端,并且可以启动新的进程# attach 直接进入容器启动命令的终端,不会启动新的进程
5、启动停止容器
xxxxxxxxxxdocker start (容器id or 容器名) # 启动容器docker restart (容器id or 容器名) # 重启容器docker stop (容器id or 容器名) # 停止容器docker kill (容器id or 容器名) # 强制停止容器
6、删除容器
xxxxxxxxxxdocker rm 容器id # 删除指定容器docker rm -f $(docker ps -a -q) # 删除所有容器docker ps -a -q|xargs docker rm # 删除所有容器
2.5、常用其他命令
1、查看容器中运行的进程信息,支持 ps 命令参数。
xxxxxxxxxx# 命令docker top 容器id# 测试jetson@ubuntu:~$ docker ps -aCONTAINER ID IMAGE COMMAND CREATED STATUS PORTS NAMESc54bf9efae47 ubuntu:latest "/bin/bash" 2 hours ago Up 2 minutes funny_hugle3b9c01839579 hello-world "/hello" 3 hours ago Exited (0) 3 hours ago jovial_brownjetson@ubuntu:~$ docker top c5UID PID PPID C STIME TTY TIME CMDroot 9667 9647 0 14:20 pts/0 00:00:00 /bin/bash
2、查看容器/镜像的元数据
xxxxxxxxxx# 命令docker inspect 容器id# 测试查看容器元数据jetson@ubuntu:~$ docker ps -aCONTAINER ID IMAGE COMMAND CREATED STATUS PORTS NAMESc54bf9efae47 ubuntu:latest "/bin/bash" 2 hours ago Up 4 minutes funny_hugle3b9c01839579 hello-world "/hello" 3 hours ago Exited (0) 3 hours ago jovial_brownjetson@ubuntu:~$ docker inspect c54bf9efae47[{# 完整的id,这里上面的容器id,就是截取的这个id前几位"Id": "c54bf9efae471071391202a8718b346d9af76cb1ff17741e206280603d6f0056","Created": "2023-04-24T04:19:46.232822024Z","Path": "/bin/bash","Args": [],"State": {"Status": "running","Running": true,"Paused": false,"Restarting": false,"OOMKilled": false,"Dead": false,"Pid": 9667,"ExitCode": 0,"Error": "","StartedAt": "2023-04-24T06:20:58.508213216Z","FinishedAt": "2023-04-24T06:19:45.096483592Z"},。。。。# 测试查看镜像元数据jetson@ubuntu:~$ docker imagesREPOSITORY TAG IMAGE ID CREATED SIZEubuntu latest bab8ce5c00ca 6 weeks ago 69.2MBhello-world latest 46331d942d63 13 months ago 9.14kBjetson@ubuntu:~$ docker inspect bab8ce5c00ca[{"Id": "sha256:bab8ce5c00ca3ef91e0d3eb4c6e6d6ec7cffa9574c447fd8d54a8d96e7c1c80e","RepoTags": ["ubuntu:latest"],"RepoDigests": ["ubuntu@sha256:67211c14fa74f070d27cc59d69a7fa9aeff8e28ea118ef3babc295a0428a6d21"],"Parent": "","Comment": "","Created": "2023-03-08T04:32:41.063980445Z","Container": "094fd0c521be8c84d81524e4a5e814e88a2839899c56f654484d32d171c7195b","ContainerConfig": {"Hostname": "094fd0c521be",............."Labels": {"org.opencontainers.image.ref.name": "ubuntu","org.opencontainers.image.version": "22.04"}},"DockerVersion": "20.10.12","Author": "","Config": {"Hostname": "",........."Labels": {"org.opencontainers.image.ref.name": "ubuntu","org.opencontainers.image.version": "22.04"}},"Architecture": "arm64","Variant": "v8","Os": "linux","Size": 69212233,"VirtualSize": 69212233,"GraphDriver": {"Data": {"MergedDir": "/var/lib/docker/overlay2/8418b919a02d38a64ab86060969b37b435977e9bbdeb6b0840d4eb698280e796/merged","UpperDir": "/var/lib/docker/overlay2/8418b919a02d38a64ab86060969b37b435977e9bbdeb6b0840d4eb698280e796/diff","WorkDir": "/var/lib/docker/overlay2/8418b919a02d38a64ab86060969b37b435977e9bbdeb6b0840d4eb698280e796/work"},"Name": "overlay2"},"RootFS": {"Type": "layers","Layers": ["sha256:874b048c963ab55b06939c39d59303fb975d323822a4ea48a02ac8dc635ea371"]},"Metadata": {"LastTagTime": "0001-01-01T00:00:00Z"}}]
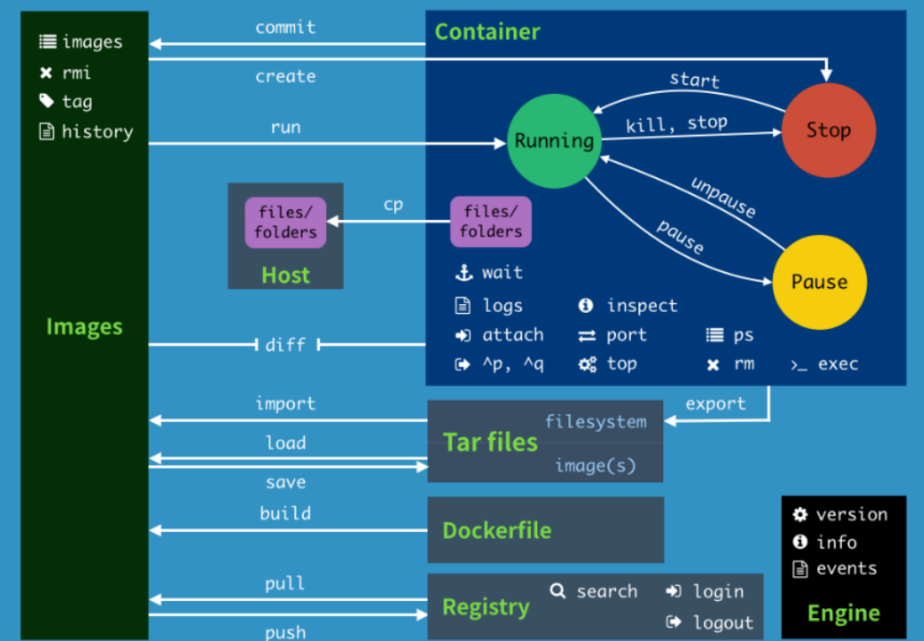
2.6、命令小结