快速上手
连接前准备
- 检查舵机连接线、电池电源线、摄像头排线、树莓派排线连接准确和带出厂镜像的SD卡安装无误后,打开小车底板的电源开关。
- 此教程必须是树莓派5(PI5)为主控小车启动大约1分钟,系统启动后会鸣笛一声,底板上的LED2蓝色灯常亮,表示小车已经正常启动,并且成功开启的小车的热点名称为“Raspbot”。
如果LED1红色灯闪烁则代表摄像头调用异常,请检查摄像头排线连接。
通过手机连接到小车的热点wifi:Raspbot ,密码为:12345678
特别提醒:小车的WIFI名称:Raspbot小车的wifi密码:12345678
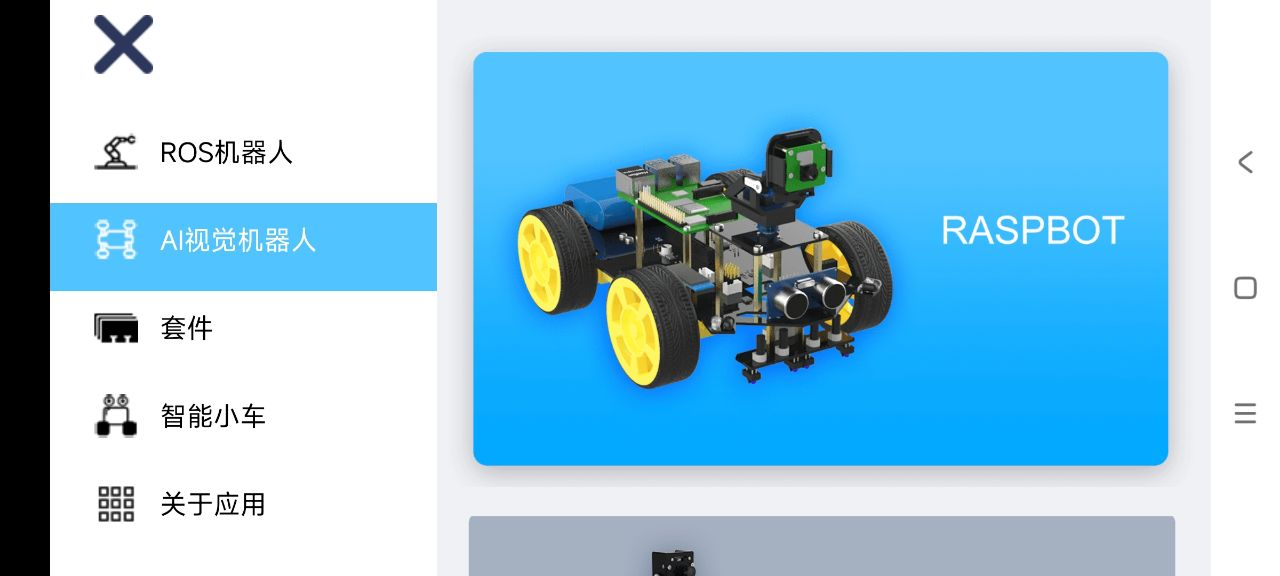
- 首次打开【YahboomRobot】APP时,需要选择对应的产品,在首页左边栏选择【AI视觉机器人】->【RASPBOT】。
xxxxxxxxxx第3-第6步是因为APP是第一次安装和使用此产品才需要进入此流程,如果不是第1次使用的情况下,可以直接从第7步开始看
- 点击页面进去以后,会出现此画面,如果是PI5为主控LED1、2的灯不用理会APP所说,直接点击下一步即可

- 手机需要开启【位置信息】服务,并点击允许APP使用定位信息。

- 然后出现此页面 ,直接点击配网按钮进入下一个页面即可,如果是PI5为主控无需理会此页面,无需其它操作

- 进入到了扫描配网的界面,直接点击确定即可,如果是PI5为主控无需理会此页面

- 在此页面等待一段时间后,会自动搜索到raspbot的小车
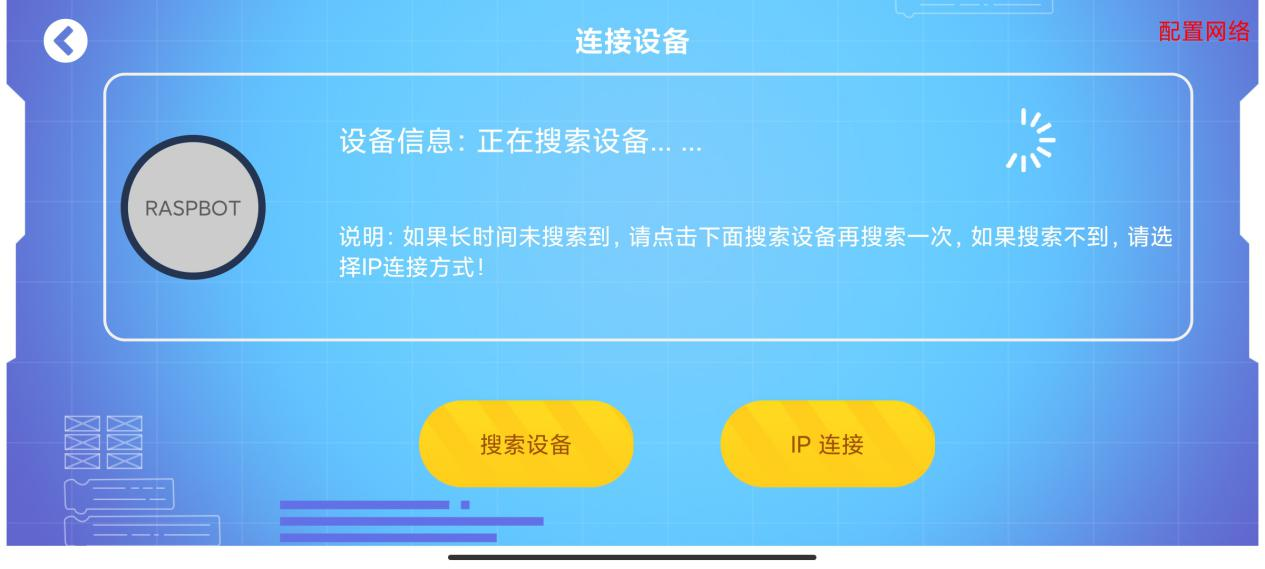
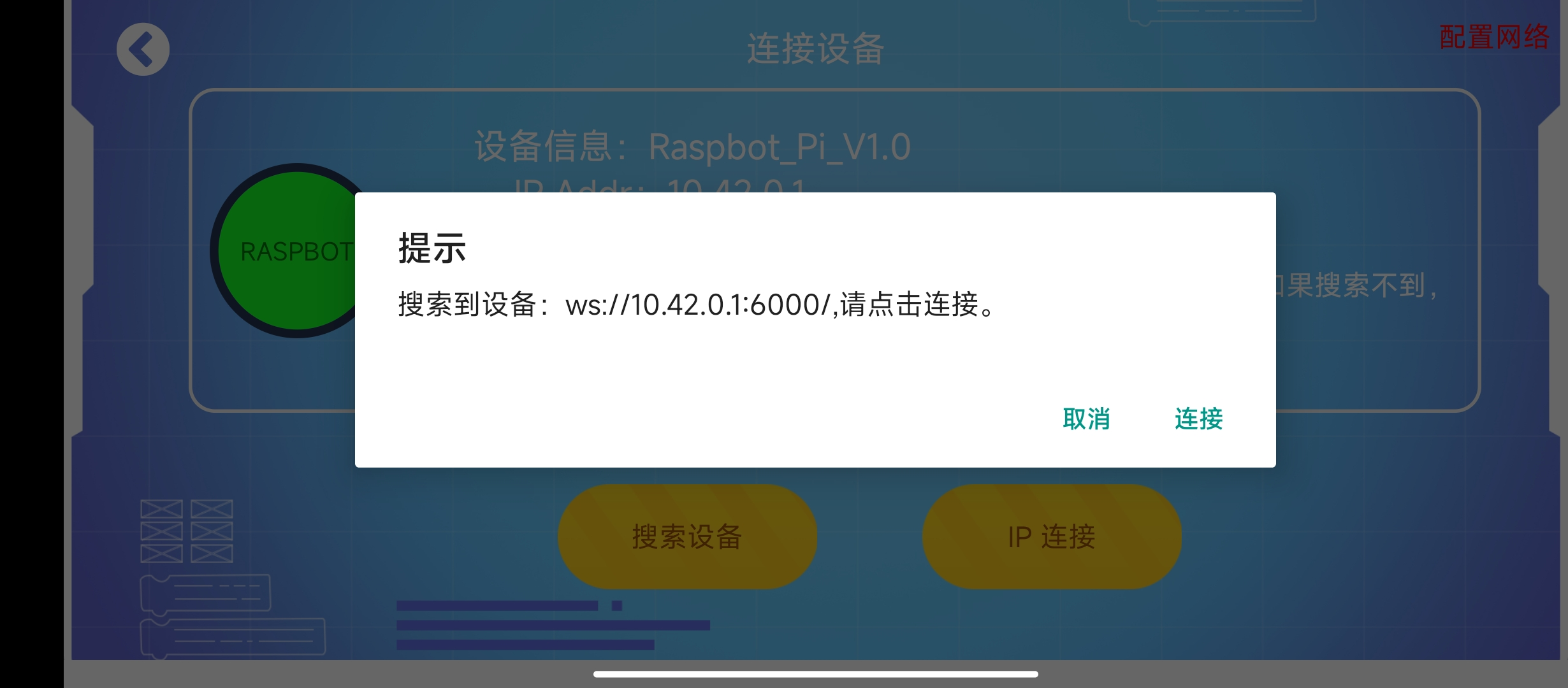
- 如果搜索成功会出现连接的页面,点击连接即可;如果自动搜索不出来,多点几次搜索设备按钮
- 如果长时间没有搜索到设备,请检查下手机是否连接到小车的wifi了。
(以下步骤一般不需要操作)连上小车的wifi后也可以尝试使用IP连接。“IP”:输入小车的IP地址(10.42.0.1)这个ip是树莓派热点默认的IP地址,“Port”:6000,“Video”:6001。

- 连接成功后进入功能选择界面

- 当要切换成连接局域网WiFi的方式的连接,需要登录到树莓派配置一下要连接的wifi,如何连接wifi,请看教程raspbot_PI5连接WiFi方法文档。
xxxxxxxxxx注意事项:使用热点模式和连接到不能上网的wifi,都是没有办法实现APP遥控手势识别的功能的,此功能需要能上网的wifi。
小车APP功能介绍
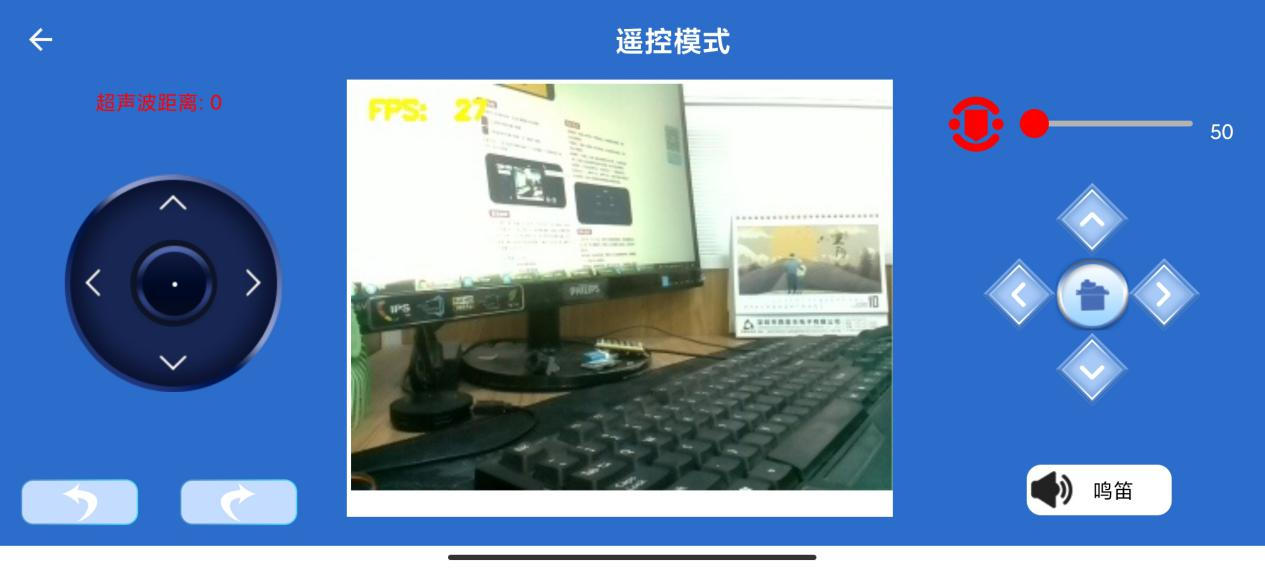
- 遥控
左边摇杆为车体运动,右边为摄像头云台控制。
右上角的滑竿控制【遥控界面】和【识别控制界面】的运动速度。
- 避障跟踪
- 传感器显示:显示超声波测距和左右红外传感器的状态,红外传感器在【避障跟随】界面才打开,平常处于关闭状态。
- 超声波避障模式:仅使用超声波测距进行避障,再次点击按钮可关闭功能。
- 超声波+红外避障:同时使用超声波测距和红外感应进行避障,再次点击按钮可关闭功能。

- 巡线模式
- 传感器显示:显示循迹模块S1-S4灯的状态,检测到黑色亮起,白色熄灭。
- 巡线模式:对白底黑线路径进行巡线运动,再次点击按钮可关闭功能。
- 画地为牢:将小车限制在白底黑线的范围内运动,再次点击按钮可关闭功能。

- 目标检测 -人脸检测:点击【人脸检测】,将人脸对准摄像头进行识别,再次点击按钮可关闭功能。
- 颜色检测:点击【颜色检测】,将要识别的颜色对着摄像头,支持红、绿、蓝、黄四种颜色,再次点击按钮可关闭功能。
- 移动检测:移动检测的对象对准摄像头正中央,点击【移动检测】按钮,正中间出现蓝色框,框中的对象移动,框也会跟着移动,再次点击按钮可关闭功能。

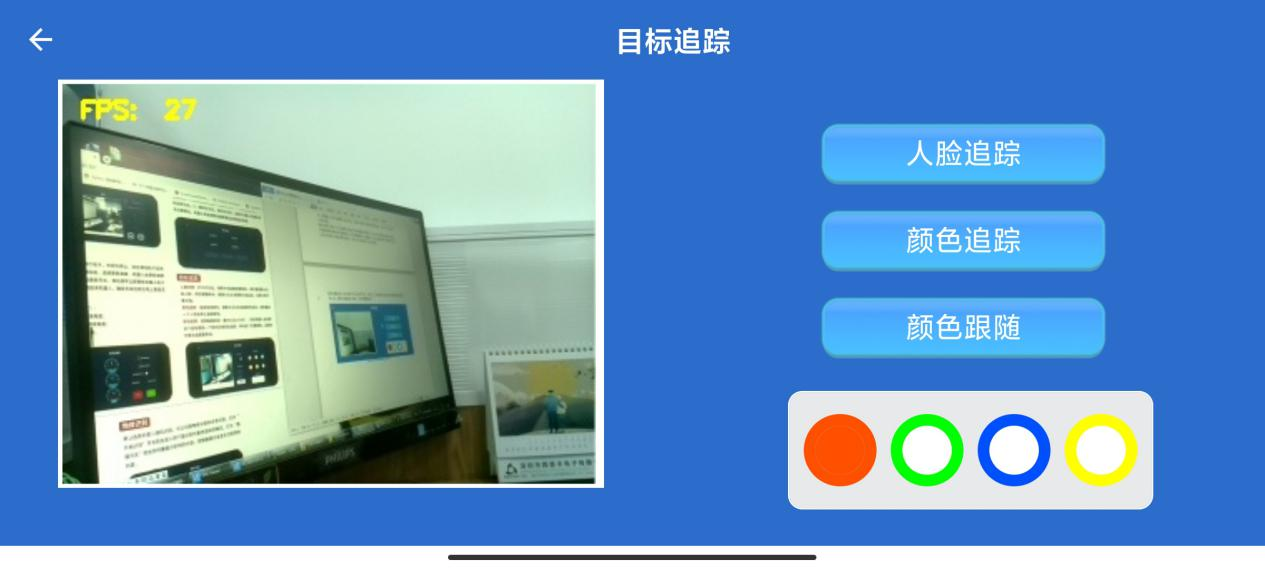
- 目标追踪
- 人脸追踪:点击【人脸追踪】按钮后,将人脸对准摄像头,然后慢慢移动,摄像头云台会跟随人脸运动,注意光线对识别效果的影响,再次点击按钮可关闭功能。
- 颜色追踪:通过下方的颜色选择栏选择跟踪的颜色,再点击【颜色追踪】按钮,将要跟踪的颜色对准摄像头,然后慢慢移动,摄像头云台会跟踪相应的颜色移动,注意光线对识别效果的影响,再次点击按钮可关闭功能。
- 颜色跟随:将小车放在可以运动平面,通过下方的颜色选择栏选择跟踪的颜色,再点击【颜色跟随】按钮,将要跟随的物体对准摄像头,然后慢慢移动,小车会接近识别的颜色,云台也会根据识别颜色上下移动,再次点击按钮可关闭功能。
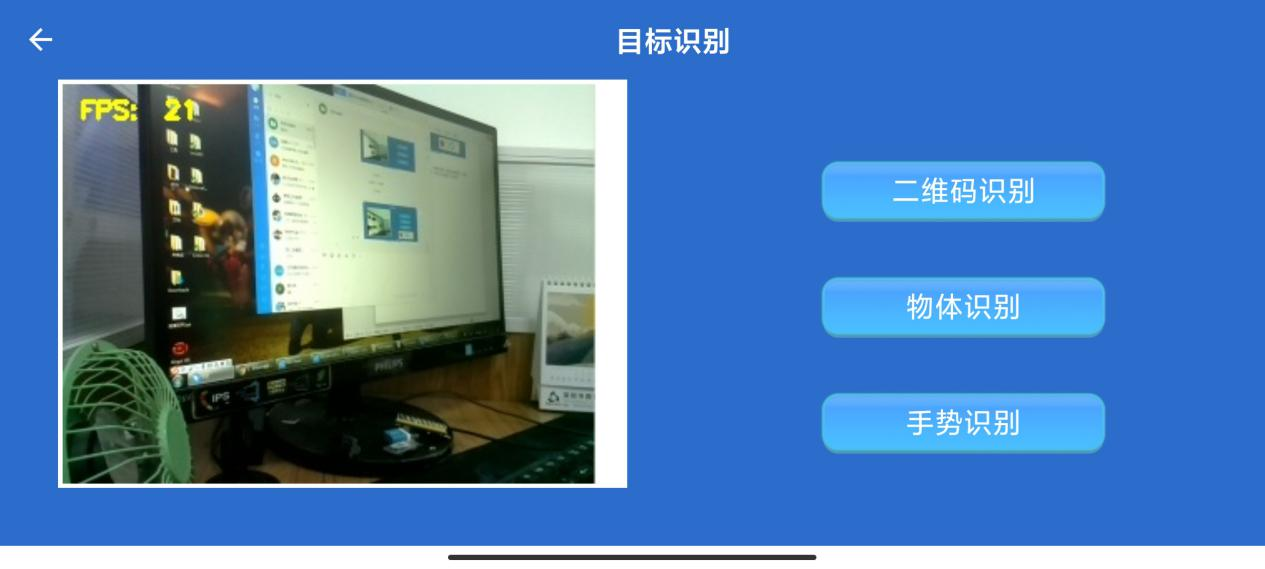
- 目标识别
- 二维码识别:点击【二维码识别】按钮后,将要识别的二维码对准摄像头,视频画面中会框选出二维码并显示相应的字符,再次点击按钮可关闭功能。
- 物体识别:点击【物体识别】按钮后,将要识别的物体对准摄像头,视频画面中会框选出物体并显示相应的英文名称字符,再次点击按钮可关闭功能。
- 手势识别:点击【手势识别】按钮后,将手对准摄像头比划手势,视频画面中会显示出识别到的手势名称,此功能需要所连WIFI可以上网,再次点击按钮可关闭功能。(热点模式因为没有网络,所以此功能不可用)
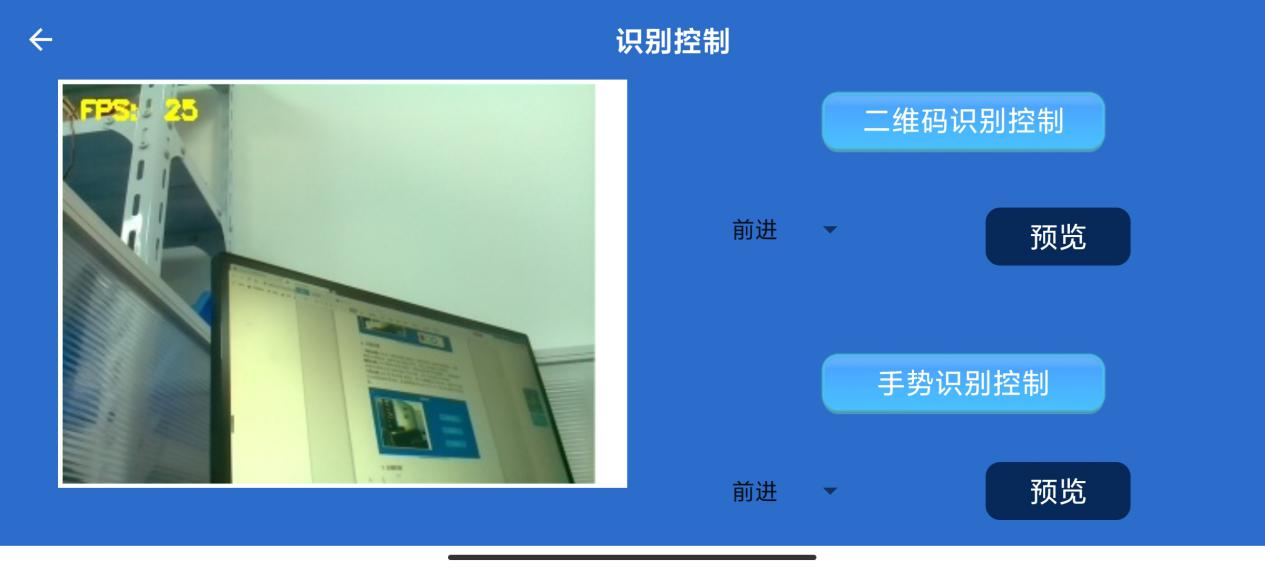
- 识别控制
- 二维码识别控制:点击【二维码识别控制】按钮,通过运动栏选择相应的运动,通过点击【预览】按钮生成相应的二维码。将二维码对准摄像头,小车识别后将作出相应的运动。再次点击【二维码识别控制】按钮可关闭功能。
- 手势识别控制:点击【手势识别控制】按钮,通过运动栏选择相应的运动,通过点击【预览】按钮查看对应的手势。对准摄像头比出相应的手势,小车识别后将作出相应的运动。再次点击【手势识别控制】按钮可关闭功能。此功能需要所连WIFI可以上网,再次点击按钮可关闭功能。(热点模式因为没有网络,所以此功能不可用)
- 自动驾驶
- 画面切换有三种模式:正常画面、经过透视变换后的画面、经过归一处理并带有处理标线的画面。
- 进入自动驾驶界面后,舵机云台会运动到默认位置,注意蓝色框看到的位置为车身前位置,最下面的蓝线不能离车前框太远或者在车身上,这样自动驾驶会出现无法巡线,如果偏离太大可通过云台方向控制到合适位置,然后打开自动驾驶开关。

App遥控可能出现失灵的情况
- APP的画面能看,但无法控制小车,是因为控制的进程被手机终止掉了,重启APP重新连接到小车即可。
- APP的传感器数据没实时更新,是因为手机休眠把结束接收传感器的进程挂掉,导致大程序的发送数据的线程终止,这时需要重启app和小车。
- APP带有手势识别功能无法使用,请确保连接到的wifi是要联网的,热点模式和没联网的wifi是没法使用此功能。