3、安装Rosmaster驱动库
3、安装Rosmaster驱动库3.1、安装驱动库前声明3.2、下载Python驱动库文件3.3、传输文件到Jetson Nano3.4、开始安装3.5、导入库文件3.6、驱动库基础使用方法3.7、API简介
3.1、安装驱动库前声明
小车出厂镜像系统已经安装好最新的驱动库,所以可以不必重复安装。如果使用的不是出厂的镜像,或者驱动库有更新内容,才需要安装驱动库。
出厂系统自带的驱动库存放路径:~/Rosmaster-App/py_install_V3.3.1
安装驱动库的方法请参考以下步骤,这里以V3.3.1版本安装为例。
3.2、下载Python驱动库文件
本课程资料中有提供最新版本的Rosmaster Python驱动库,名称为py_install.zip。
压缩包里包含以下文件:
或者Yahboom官网在Rosmaster资料下载专区中点击【python驱动库下载】下载到最新版本py_install.zip文件。
3.3、传输文件到Jetson Nano
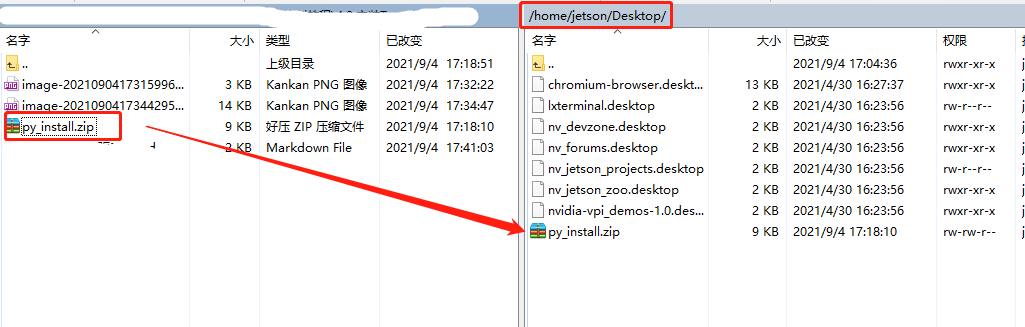
如果是使用Jetson Nano自带的浏览器到亚博智能官网下载文件,请把文件下载到用户可操作路径,例如桌面。
如果是使用资料中的驱动库压缩包文件,或者是用电脑浏览器下载驱动库文件,可以通过WinSCP软件将驱动库压缩包文件拖入Jetson Nano桌面上。
安装成功后驱动库文件可删除掉。
如果还不会使用WinSCP传输文件的朋友,请查看以下网页WinSCP详细安装和操作方法:
3.4、开始安装
打开Jetson Nano的终端,输入以下命令解压。
进入桌面并查看文件是否存在,红色方框中就是目标文件
cd ~/Desktop && ls解压文件
xxxxxxxxxxunzip py_install.zip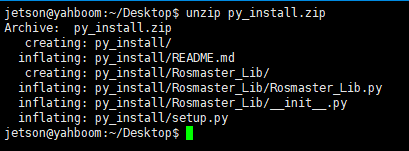
注意:整个文档例程都是以py_install.zip压缩包放在Jetson Nano系统桌面为例。如果个人把压缩包存放的路径不同,请根据实际路径进入对应的目录去操作。
进入驱动库的文件夹
xxxxxxxxxxcd py_install运行安装命令,看到最后提示的安装版本号则表示安装成功。此命令会覆盖掉之前已经安装过的Rosmaster_Lib驱动库。
xxxxxxxxxxsudo python3 setup.py install
3.5、导入库文件
Rosmaster驱动库的名称为Rosmaster_Lib,在程序中使用Rosmaster_Lib来导入库。
xxxxxxxxxxfrom Rosmaster_Lib import Rosmaster
3.6、驱动库基础使用方法
详细内容请查看本节课的视频教程。
源码路径:Rosmaster/Samples/3.test_rosmaster.ipynb
3.7、API简介
以下驱动库的API简介,在后面控制课程中介绍功能用法和参数内容。
x| __del__(self)|| __init__(self, car_type=1, com='/dev/myserial', delay=0.002, debug=False)| Initialize self. See help(type(self)) for accurate signature.|| clear_auto_report_data(self)| # 清除单片机自动发送过来的缓存数据| # Clear the cache data automatically sent by the MCU|| create_receive_threading(self)| # 开启接收和处理数据的线程| # Start the thread that receives and processes data|| get_accelerometer_data(self)| # 获取加速度计三轴数据,返回a_x, a_y, a_z| # Get accelerometer triaxial data, return a_x, a_y, a_z|| get_battery_voltage(self)| # 获取电池电压值| # Get the battery voltage|| get_gyroscope_data(self)| # 获取陀螺仪三轴数据,返回g_x, g_y, g_z| # Get the gyro triaxial data, return g_x, g_y, g_z|| get_magnetometer_data(self)| # 获取磁力计三轴数据,返回m_x, m_y, m_z|| get_motion_data(self)| # 获取小车速度,val_vx, val_vy, val_vz| # Get the car speed, val_vx, val_vy, val_vz|| get_motion_pid(self)| # 获取小车的运动PID参数, 返回[kp, ki, kd]| # Get the motion PID parameters of the dolly and return [kp, ki, kd]|| get_motor_encoder(self)| # 获取四路电机编码器数据| # Obtain data of four-channel motor encoder|| get_uart_servo_angle(self, s_id)| # 读取总线舵机的角度,s_id表示要读取的舵机的ID号,s_id=[1-6]| # Read the Angle of the bus steering gear, s_id indicates the ID number of the steering gear to beread, s_id=[1-6]|| get_uart_servo_angle_array(self)| # 一次性读取六个舵机的角度[xx, xx, xx, xx, xx, xx],如果某个舵机错误则那一位为-1| # Read the angles of three steering gear [xx, xx, xx, xx, xx, xx] at one time. If one steering gearis wrong, that one is -1|| get_uart_servo_value(self, servo_id)| # 读取总线舵机位置参数, servo_id=[1-250], 返回:读到的ID,当前位置参数| # Read bus servo position parameters, servo_id=[1-250], return: read ID, current position parameters|| get_version(self)| # 获取底层单片机版本号,如1.1| # Get the underlying microcontroller version number, such as 1.1|| reset_flash_value(self)| # 重置小车flash保存的数据,恢复出厂默认值。| # Reset the car flash saved data, restore the factory default value|| set_auto_report_state(self, enable, forever=False)| # 单片机自动返回数据状态位,默认为开启,如果设置关闭会影响部分读取数据功能。| # enable=True,底层扩展板会每隔10毫秒发送一包数据,总共四包不同数据,所以每包数据每40毫秒刷新一次。enable=False,则不发送。| # forever=True永久保存,=False临时作用。| # The MCU automatically returns the data status bit, which is enabled by default. If the switch isclosed, the data reading function will be affected.| # enable=True, The underlying expansion board sends four different packets of data every 10 milliseconds, so each packet is refreshed every 40 milliseconds.| # If enable=False, the report is not sent.| # forever=True for permanent, =False for temporary|| set_beep(self, on_time)| # 蜂鸣器开关,on_time=0:关闭,on_time=1:一直响,| # on_time>=10:响xx毫秒后自动关闭(on_time是10的倍数)。| # Buzzer switch. On_time =0: the buzzer is off. On_time =1: the buzzer keeps ringing| # On_time >=10: automatically closes after xx milliseconds (on_time is a multiple of 10)|| set_car_motion(self, v_x, v_y, v_z)| # 小车运动控制,v_x=[-1.0, 1.0], v_y=[-1.0, 1.0], v_z=[-5.0, 5.0]| # Car movement control, v_x = [-1.0, 1.0], v_y = [-1.0, 1.0], v_z = [-5.0, 5.0]|| set_car_run(self, state, speed, adjust=False)| # 控制小车向前、向后、向左、向右等运动。| # state=[0~6],=0停止,=1前进,=2后退,=3向左,=4向右,=5左旋,=6右旋| # speed=[-100, 100],=0停止。| # adjust=True开启陀螺仪辅助运动方向。=False则不开启。| # Control the car forward, backward, left, right and other movements.| # State =[0~6],=0 stop,=1 forward,=2 backward,=3 left,=4 right,=5 spin left,=6 spin right| # Speed =[-100, 100], =0 Stop.| # Adjust =True Activate the gyroscope auxiliary motion direction. If =False, the function is disabled.|| set_car_type(self, car_type)| # 设置小车类型| # Set car Type|| set_colorful_effect(self, effect, speed=255, parm=255)| # RGB可编程灯带特效展示。| # effect=[0, 6],0:停止灯效,1:流水灯,2:跑马灯,3:呼吸灯,4:渐变灯,5:星光点点,6:电量显示| # speed=[1, 10],数值越小速度变化越快。| # parm,可不填,作为附加参数。用法1:呼吸灯效果传入[0, 6]可修改呼吸灯颜色。| # RGB programmable light band special effects display.| # Effect =[0, 6], 0: stop light effect, 1: running light, 2: running horse light, 3: breathing light, 4: gradient light, 5: starlight, 6: power display| # Speed =[1, 10], the smaller the value, the faster the speed changes| # Parm, left blank, as an additional argument. Usage 1: The color of breathing lamp can be modified by the effect of breathing lamp [0, 6]|| set_colorful_lamps(self, led_id, red, green, blue)| # RGB可编程灯带控制,可单独控制或全体控制,控制前需要先停止RGB灯特效。| # led_id=[0, 13],控制对应编号的RGB灯;led_id=0xFF, 控制所有灯。| # red,green,blue=[0, 255],表示颜色RGB值。| # RGB programmable light belt control, can be controlled individually or collectively, before control need to stop THE RGB light effect.| # Led_id =[0, 13], control the CORRESPONDING numbered RGB lights; Led_id =0xFF, controls all lights.| # Red,green,blue=[0, 255], indicating the RGB value of the color.|| set_motor(self, speed_1, speed_2, speed_3, speed_4)| # 控制电机PWM脉冲,从而控制速度(未使用编码器测速)。speed_X=[-100, 100]| # Control PWM pulse of motor to control speed (speed measurement without encoder). speed_X=[-100, 100]|| set_pid_param(self, kp, ki, kd, forever=False)| # PID 参数控制,会影响set_car_motion函数控制小车的运动速度变化情况。默认情况下可不调整。| # kp ki kd = [0, 10.00], 可输入小数。| # forever=True永久保存,=False临时作用。| # 由于永久保存需要写入芯片flash中,操作时间较长,所以加入delay延迟时间,避免导致单片机丢包的问题。| # 临时作用反应快,单次有效,重启单片后数据不再保持。| # PID parameter control will affect the set_CAR_motion function to control the speed change of thecar. This parameter is optional by default.| # KP ki kd = [0, 10.00]| # forever=True for permanent, =False for temporary.| # Since permanent storage needs to be written into the chip flash, which takes a long time to operate, delay is added to avoid packet loss caused by MCU.| # Temporary effect fast response, single effective, data will not be maintained after restarting the single chip|| set_pwm_servo(self, servo_id, angle)| # 舵机控制,servo_id:对应ID编号,angle:对应舵机角度值| # servo_id=[1, 4], angle=[0, 180]| # Servo control, servo_id: corresponding, Angle: corresponding servo Angle value|| set_pwm_servo_all(self, angle_s1, angle_s2, angle_s3, angle_s4)| # 同时控制四路PWM的角度,angle_sX=[0, 180]| # At the same time control four PWM Angle, angle_sX=[0, 180]|| set_uart_servo(self, servo_id, pulse_value, run_time=500)| # 控制总线舵机。servo_id:[1-255],表示要控制的舵机的ID号, id=254时, 控制所有已连接舵机。| # pulse_value=[96,4000]表示舵机要运行到的位置。| # run_time表示运行的时间(ms),时间越短,舵机转动越快。最小为0,最大为2000| # Control bus steering gear. Servo_id :[1-255], indicating the ID of the steering gear to be controlled. If ID =254, control all connected steering gear.| # pulse_value=[96,4000] indicates the position to which the steering gear will run.| # run_time indicates the running time (ms). The shorter the time, the faster the steering gear rotates. The minimum value is 0 and the maximum value is 2000|| set_uart_servo_angle(self, s_id, s_angle, run_time=500)| # 设置总线舵机角度接口:id:7-9, angle: 7:[0, 225], 8:[30, 270], 9:[30, 180], 设置舵机要运动到的角度。| # 设直立向上夹紧状态,三个舵机都为180度,7/8号顺时针(向下)转为减,逆时针(向上)转为增,夹子松开为减,夹紧为增。| # run_time表示运行的时间(ms),时间越短,舵机转动越快。最小为0,最大为2000| # Set bus steering gear Angle interface: ID :7-9, Angle :7 :[0, 225], 8:[30, 270], 9:[30, 180], setsteering gear to move to the Angle.| # Set up the vertical clamping state, the three steering gear are 180 degrees, 7/8 clockwise (down)to decrease, counterclockwise (up) to increase, clip release to decrease, clamping to increase.| # run_time indicates the running time (ms). The shorter the time, the faster the steering gear rotates. The minimum value is 0 and the maximum value is 2000|| set_uart_servo_angle_array(self, angle_s=[90, 90, 90, 90, 90, 180], run_time=500)| # 同时控制机械臂所有舵机的角度。| # Meanwhile, the Angle of all steering gear of the manipulator is controlled|| set_uart_servo_id(self, servo_id)| # 设置总线舵机的ID号,servo_id=[1-250]。| # 运行此函数前请确认只连接一个总线舵机,否则会把所有已连接的总线舵机都设置成同一个ID,造成控制混乱。| # Set the bus servo ID, servo_id=[1-250].| # Before running this function, please confirm that only one bus actuator is connected. Otherwise,all connected bus actuators will be set to the same ID, resulting in confusion of control|| set_uart_servo_offset(self, servo_id)| # 设置机械臂的中位偏差,servo_id=0~6, =0全部恢复出厂默认值| # Run the following command to set the mid-bit deviation of the manipulator: servo_id=0 to 6, =0 Restore the factory default values|| set_uart_servo_torque(self, enable)| # 关闭/打开总线舵机扭矩力, enable=[0, 1]。| # enable=0:关闭舵机扭矩力,可以用手转动舵机,但命令无法控制转动;| # enable=1:打开扭矩力,命令可以控制转动,不可以用手转动舵机。| # Turn off/on the bus steering gear torque force, enable=[0, 1].| # enable=0: Turn off the torque force of the steering gear, the steering gear can be turned by hand, but the command cannot control the rotation;| # enable=1: Turn on torque force, command can control rotation, can not turn steering gear by hand