Navigation2导航
注:树莓派需要与microROS控制板ROS_DOMAIN_ID需要一致,可以查看【MicroROS控制板参数配置】来设置microROS控制板ROS_DOMAIN_ID,查看教程【连接MicroROS代理】判断ID是否一致。
1、Navigation2简介
Navigation2整体架构图
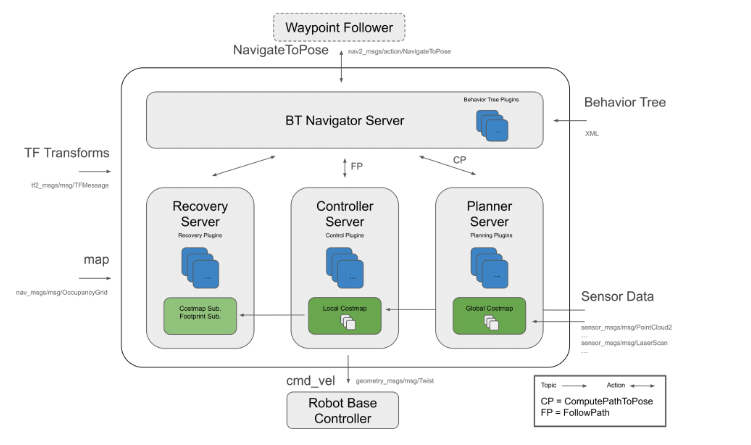
Navigation2具有下列工具:
加载、提供和存储地图的工具(地图服务器Map Server)
在地图上定位机器人的工具 (AMCL)
避开障碍物从A点移动到B点的路径规划工具(Nav2 Planner)
跟随路径过程中控制机器人的工具(Nav2 Controller)
将传感器数据转换为机器人世界中的成本地图表达的工具(Nav2 Costmap 2D)
使用行为树构建复杂机器人行为的工具(Nav2 行为树和BT Navigator)
发生故障时计算恢复行为的工具(Nav2 Recoveries)
跟随顺序航点的工具(Nav2 Waypoint Follower)
管理服务器生命周期的工具和看门狗(Nav2 Lifecycle Manager)
启用用户自定义算法和行为的插件(Nav2 Core)
Navigation 2(Nav 2)是ROS 2中自带的导航框架,其目的是能够通过一种安全的方式使移动机器人从A点移动到B点。所以,Nav 2可以完成动态路径规划、计算电机速度、避开障碍物和恢复结构等行为。
Nav 2使用行为树(BT,Behavior Trees)调用模块化服务器来完成一个动作。动作可以是计算路径、控制工作(control efforts)、恢复或其他与导航相关的动作。这些动作都是通过动作服务器与行为树(BT)进行通信的独立节点。
资料参考网址:
Navigation2 文档:https://navigation.ros.org/index.html
Navigation2 github:https://github.com/ros-planning/navigation2
Navigation2 对应的论文:https://arxiv.org/pdf/2003.00368.pdf
Navigation2提供的插件:https://navigation.ros.org/plugins/index.html#plugins
2、程序功能说明
小车连接上代理,运行程序,rviz中会加载地图。在rviz界面中,用【2D Pose Estimate】工具给定小车初始位姿,然后用【2D Goal Pose】工具给定小车一个目标点。小车结合自身环境,会规划出一条路径并且根据规划的路径移动到目的地,期间如果遇到障碍物,会自助避障,到达目的地后停车。
3、查询小车信息
3.1、启动并连接代理
树莓派成功开机后,打开终端输入以下指令打开代理,
sh ~/start_agent_rpi5.sh

按下microROS控制板的复位按键,等待小车连接上代理,连接成功如下图所示。
3.2、进入小车docker
打开另一个终端输入以下指令进入docker,
xxxxxxxxxxsh ros2_humble.sh
出现以下界面就是进入docker成功,现在即可通过指令控制小车,

4、启动程序
首先启动小车处理底层数据程序,终端输入
xxxxxxxxxxros2 launch yahboomcar_bringup yahboomcar_bringup_launch.py
然后,启动rviz可视化建图,输入这个指令之前需要进入同一个docker终端,步骤如下:
在树莓派的中重新打开一个新终端输入指令,
xxxxxxxxxxdocker ps -a
能看到你进入docker的ID号以及docker版本,看到up哪一项就是当前启动的docker。

根据这个id号就能进入同一个docker,注意每次进入docker的id号都是不一样的,输入指令,
xxxxxxxxxxdocker exec -it ef0e1b7da319 /bin/bash
出现这个画面我们就是进入了同一个docker。
输入指令启动rviz可视化建图
xxxxxxxxxxros2 launch yahboomcar_nav display_launch.py
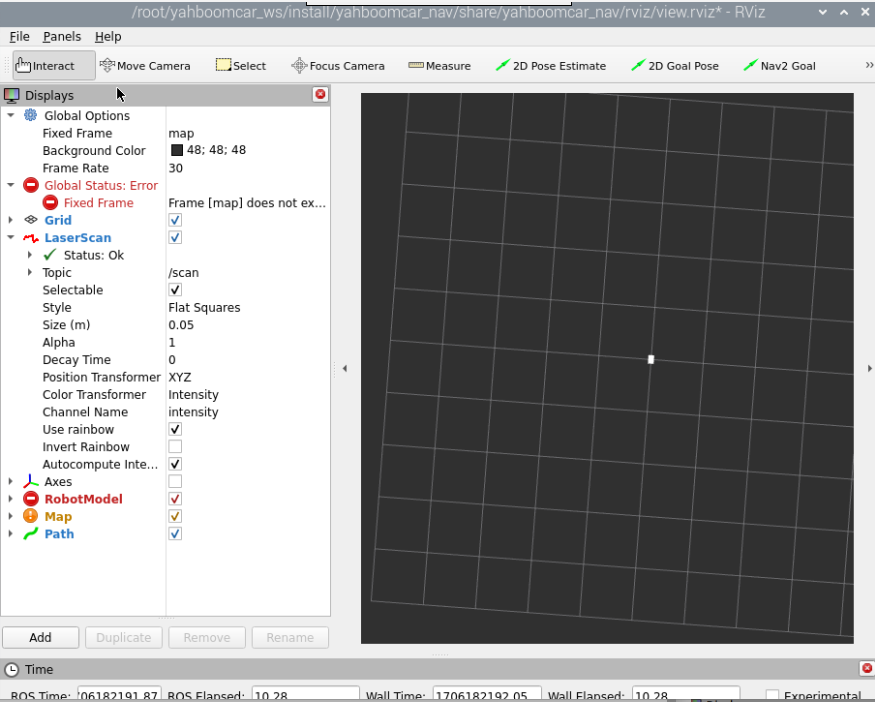
此时还没有显示地图加载,因为还没有启动导航的程序,所以没有地图加载。接下来运行导航节点,终端输入(和上面一样需要进入同一个docker终端),
xxxxxxxxxxros2 launch yahboomcar_nav navigation_dwb_launch.py
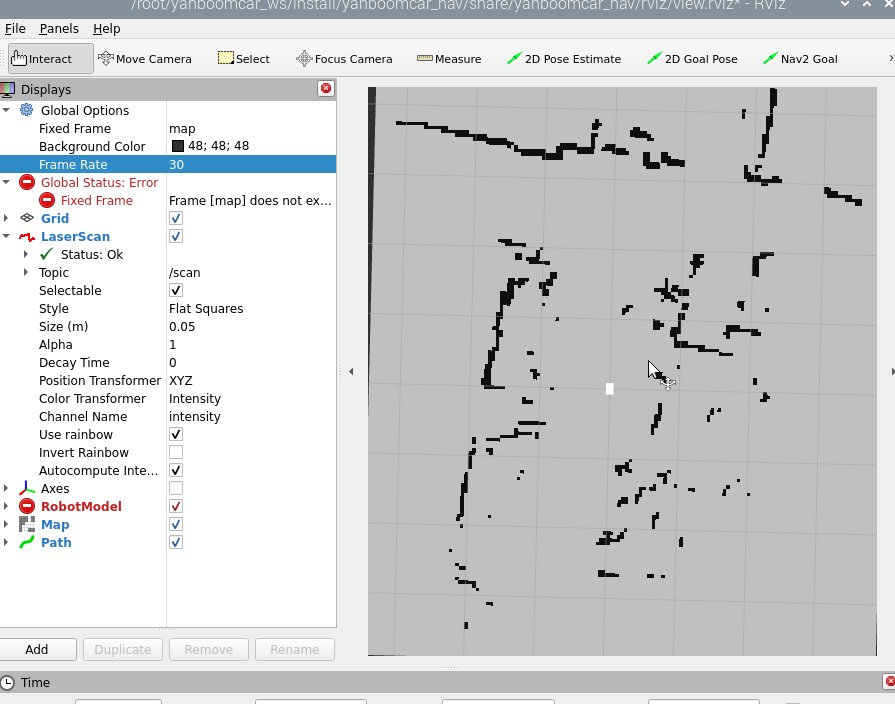
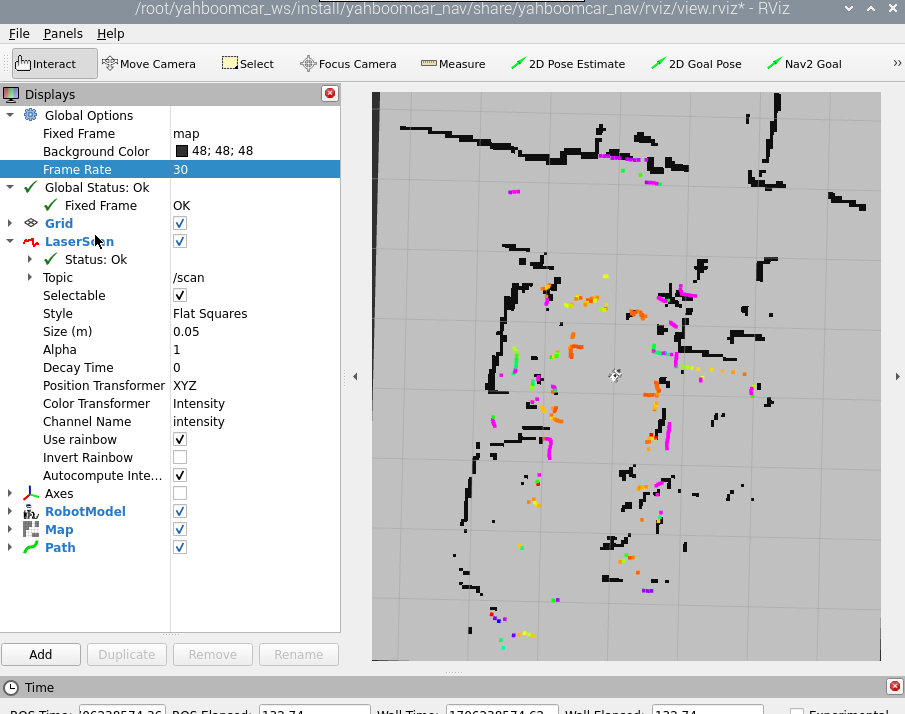
此时可以看到地图加载进去了,然后我们点击【2D Pose Estimate】,给小车设置初始位姿,根据小车在实际环境中的位置,在rviz中用鼠标点击拖动,小车模型移动我们设置的位置。如下图所示,雷达扫描的区域与实际障碍物大致重合则表示位姿准确。
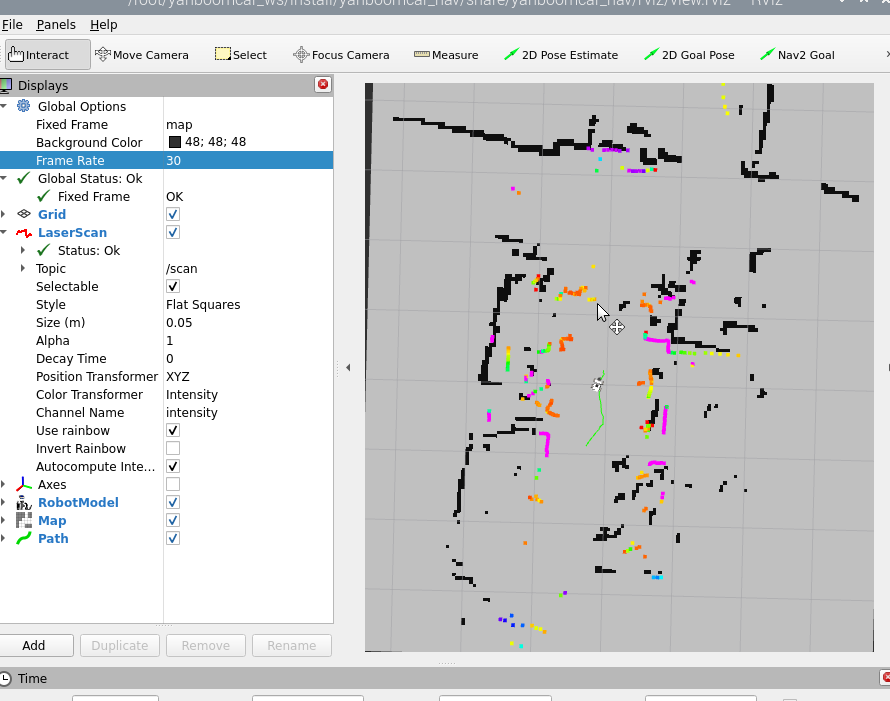
单点导航,点击【2D Goal Pose】工具,然后在rviz中选择一个目标点,小车结合周围的情况,规划出一条路径并且沿着路径移动到目标点。
多点导航,需要把nav2的插件添加进来,
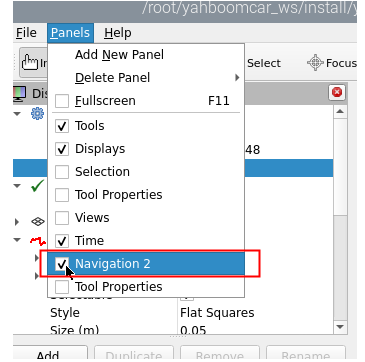
添加后,rviz显示如下,
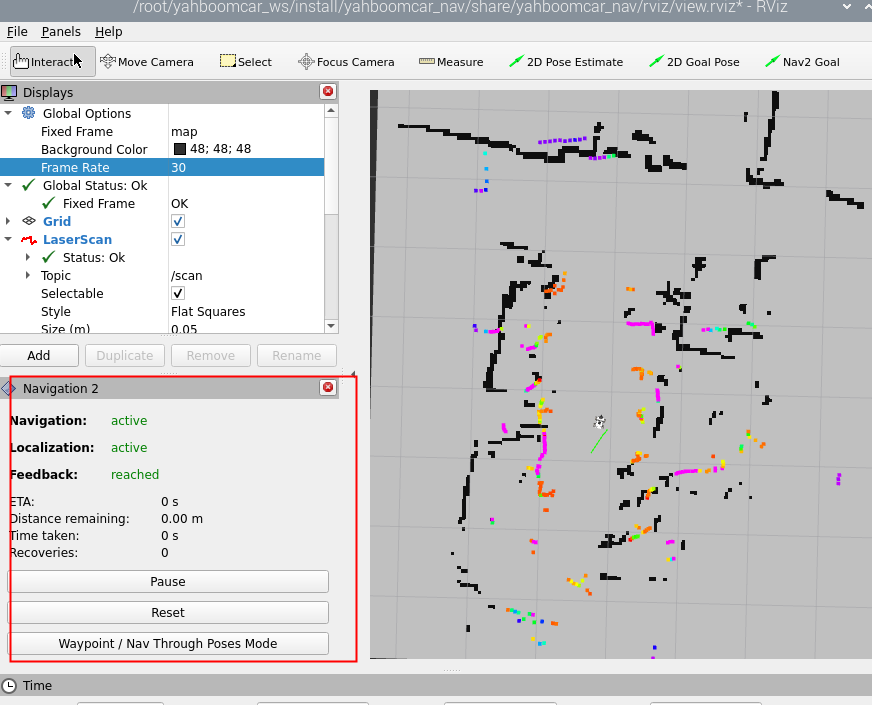
然后点击【Waypoint/Nav Through Poses Mode】,
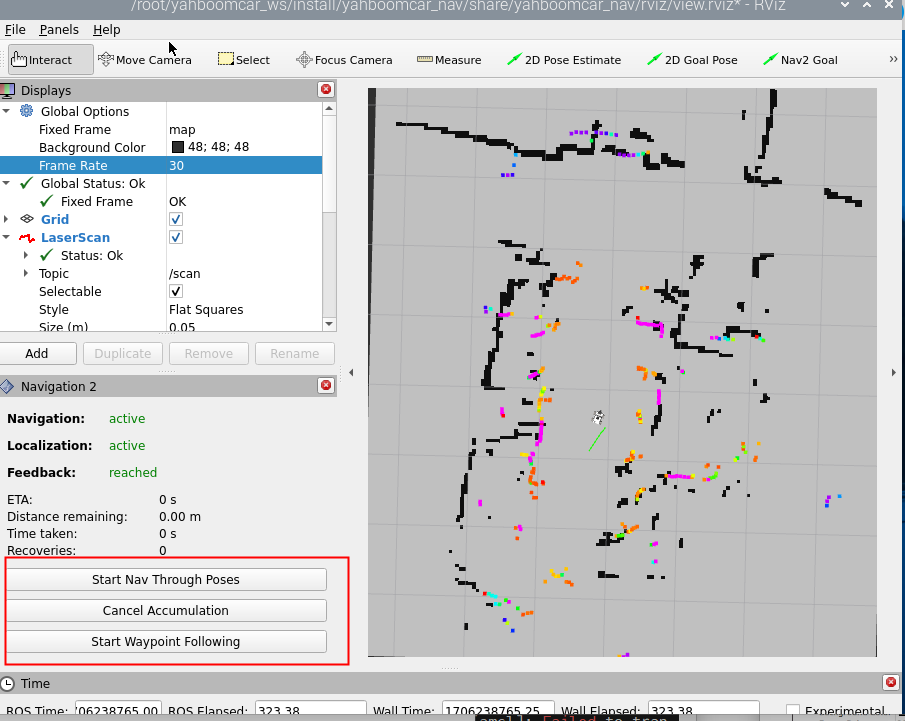
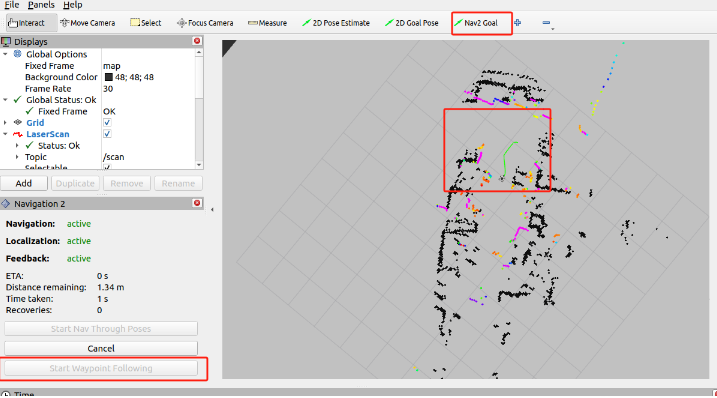
使用rivz工具栏中的【Nav2 Goal】给定任意的目标点 ,然后点击【Start Waypoint Following】开始规划路径导航。小车会根据选的点的先后顺序,到了目标点后会自动前往下一个点,无需进行操作。达到最后一个点后,小车停车等待下一个指令。
5、查看节点通讯图
终端输入(和上面一样需要进入同一个docker终端),
xxxxxxxxxxros2 run rqt_graph rqt_graph如果一开始没有显示,选择【Nodes/Topics(all)】,然后点击左上角的刷新按钮。
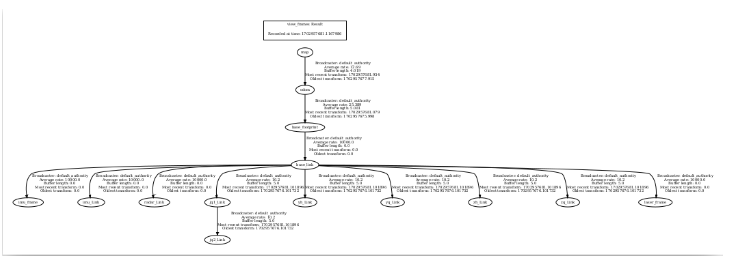
6、查看TF树
终端输入(和上面一样需要进入同一个docker终端),
xxxxxxxxxxros2 run tf2_tools view_frames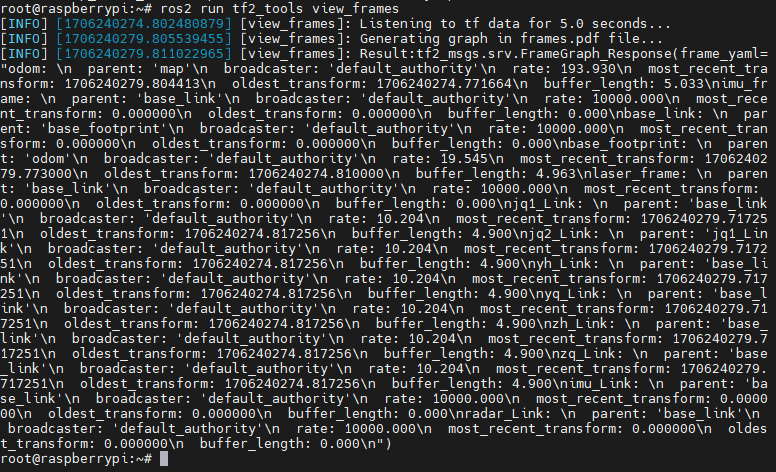
运行完毕后,会在终端的目录下生成两个文件分别是.gv和.pdf文件,其中的pdf文件就是TF树。
7、代码解析
这里只说明导航的navigation_dwb_launch.py,这个文件路径是,
xxxxxxxxxx/root/yahboomcar_ws/src/yahboomcar_nav/launchnavigation_dwb_launch.py,
ximport osfrom ament_index_python.packages import get_package_share_directoryfrom launch import LaunchDescriptionfrom launch.actions import DeclareLaunchArgumentfrom launch.actions import IncludeLaunchDescriptionfrom launch.launch_description_sources import PythonLaunchDescriptionSourcefrom launch.substitutions import LaunchConfigurationfrom launch_ros.actions import Node
def generate_launch_description(): package_path = get_package_share_directory('yahboomcar_nav') nav2_bringup_dir = get_package_share_directory('nav2_bringup')
use_sim_time = LaunchConfiguration('use_sim_time', default='false') map_yaml_path = LaunchConfiguration( 'maps', default=os.path.join(package_path, 'maps', 'yahboom_map.yaml')) nav2_param_path = LaunchConfiguration('params_file', default=os.path.join( package_path, 'params', 'dwb_nav_params.yaml'))
return LaunchDescription([ DeclareLaunchArgument('use_sim_time', default_value=use_sim_time, description='Use simulation (Gazebo) clock if true'), DeclareLaunchArgument('maps', default_value=map_yaml_path, description='Full path to map file to load'), DeclareLaunchArgument('params_file', default_value=nav2_param_path, description='Full path to param file to load'),
IncludeLaunchDescription( PythonLaunchDescriptionSource( [nav2_bringup_dir, '/launch', '/bringup_launch.py']), launch_arguments={ 'map': map_yaml_path, 'use_sim_time': use_sim_time, 'params_file': nav2_param_path}.items(), ), Node( package='tf2_ros', executable='static_transform_publisher', name='base_link_to_base_laser', arguments=['-0.0046412', '0' , '0.094079','0','0','0','base_link','laser_frame'] ), Node( package='yahboomcar_nav', executable='stop_car' ) ])这里启动了以下几个节点:
base_link_to_base_laser:发布静态的TF变换;
stop_car:停车节点,ctrl c退出程序后,会发布停车速度给到小车;
bringup_launch.py:启动导航的launch文件,文件位于,
/opt/ros/humble/share/nav2_bringup/launch
另外还加载了一个导航参数配置文件dwb_nav_params.yaml和加载地图文件yahboom_map.yaml,导航参数表的位于,
xxxxxxxxxx/root/yahboomcar_ws/src/yahboomcar_nav/params地图文件位于,
xxxxxxxxxx/root/yahboomcar_ws/src/yahboomcar_nav/mapsdwb_nav_params.yaml,
xxxxxxxxxxamcl ros__parameters use_sim_timeFalse alpha10.2 alpha20.2 alpha30.2 alpha40.2 alpha50.2 base_frame_id"base_footprint" beam_skip_distance0.5 beam_skip_error_threshold0.9 beam_skip_threshold0.3 do_beamskipfalse global_frame_id"map" lambda_short0.1 laser_likelihood_max_dist2.0 laser_max_range100.0 laser_min_range-1.0 laser_model_type"likelihood_field" max_beams60 max_particles2000 min_particles500 odom_frame_id"odom" pf_err0.05 pf_z0.99 recovery_alpha_fast0.0 recovery_alpha_slow0.0 resample_interval1 robot_model_type"nav2_amcl::DifferentialMotionModel" save_pose_rate0.5 sigma_hit0.2 tf_broadcasttrue transform_tolerance1.0 update_min_a0.2 update_min_d0.25 z_hit0.5 z_max0.05 z_rand0.5 z_short0.05 scan_topicscan
bt_navigator ros__parameters use_sim_timeFalse global_framemap robot_base_framebase_link odom_topic/odom bt_loop_duration10 default_server_timeout20 default_bt_xml_filename"navigate_to_pose_w_replanning_and_recovery.xml" # 'default_nav_through_poses_bt_xml' and 'default_nav_to_pose_bt_xml' are use defaults: # nav2_bt_navigator/navigate_to_pose_w_replanning_and_recovery.xml # nav2_bt_navigator/navigate_through_poses_w_replanning_and_recovery.xml # They can be set here or via a RewrittenYaml remap from a parent launch file to Nav2. plugin_lib_namesnav2_compute_path_to_pose_action_bt_nodenav2_compute_path_through_poses_action_bt_nodenav2_smooth_path_action_bt_nodenav2_follow_path_action_bt_nodenav2_spin_action_bt_nodenav2_wait_action_bt_nodenav2_assisted_teleop_action_bt_nodenav2_back_up_action_bt_nodenav2_drive_on_heading_bt_nodenav2_clear_costmap_service_bt_nodenav2_is_stuck_condition_bt_nodenav2_goal_reached_condition_bt_nodenav2_goal_updated_condition_bt_nodenav2_globally_updated_goal_condition_bt_nodenav2_is_path_valid_condition_bt_nodenav2_initial_pose_received_condition_bt_nodenav2_reinitialize_global_localization_service_bt_nodenav2_rate_controller_bt_nodenav2_distance_controller_bt_nodenav2_speed_controller_bt_nodenav2_truncate_path_action_bt_nodenav2_truncate_path_local_action_bt_nodenav2_goal_updater_node_bt_nodenav2_recovery_node_bt_nodenav2_pipeline_sequence_bt_nodenav2_round_robin_node_bt_nodenav2_transform_available_condition_bt_nodenav2_time_expired_condition_bt_nodenav2_path_expiring_timer_conditionnav2_distance_traveled_condition_bt_nodenav2_single_trigger_bt_nodenav2_goal_updated_controller_bt_nodenav2_is_battery_low_condition_bt_nodenav2_navigate_through_poses_action_bt_nodenav2_navigate_to_pose_action_bt_nodenav2_remove_passed_goals_action_bt_nodenav2_planner_selector_bt_nodenav2_controller_selector_bt_nodenav2_goal_checker_selector_bt_nodenav2_controller_cancel_bt_nodenav2_path_longer_on_approach_bt_nodenav2_wait_cancel_bt_nodenav2_spin_cancel_bt_nodenav2_back_up_cancel_bt_nodenav2_assisted_teleop_cancel_bt_nodenav2_drive_on_heading_cancel_bt_nodenav2_is_battery_charging_condition_bt_node
bt_navigator_navigate_through_poses_rclcpp_node ros__parameters use_sim_timeFalse
bt_navigator_navigate_to_pose_rclcpp_node ros__parameters use_sim_timeFalse
controller_server ros__parameters use_sim_timeFalse controller_frequency20.0 min_x_velocity_threshold0.001 min_y_velocity_threshold0.5 min_theta_velocity_threshold0.001 failure_tolerance0.3 progress_checker_plugin"progress_checker" goal_checker_plugins"general_goal_checker" # "precise_goal_checker" controller_plugins"FollowPath"
# Progress checker parameters progress_checker plugin"nav2_controller::SimpleProgressChecker" required_movement_radius0.5 movement_time_allowance10.0 # Goal checker parameters #precise_goal_checker: # plugin: "nav2_controller::SimpleGoalChecker" # xy_goal_tolerance: 0.25 # yaw_goal_tolerance: 0.25 # stateful: True general_goal_checker statefulTrue plugin"nav2_controller::SimpleGoalChecker" xy_goal_tolerance0.25 yaw_goal_tolerance0.25 # DWB parameters FollowPath plugin"dwb_core::DWBLocalPlanner" debug_trajectory_detailsTrue min_vel_x-0.20 min_vel_y0.0 max_vel_x0.30 max_vel_y0.0 max_vel_theta1.0 min_speed_xy-0.20 max_speed_xy0.30 min_speed_theta-0.5 # Add high threshold velocity for turtlebot 3 issue. # https://github.com/ROBOTIS-GIT/turtlebot3_simulations/issues/75 acc_lim_x2.5 acc_lim_y0.0 acc_lim_theta3.2 decel_lim_x-2.5 decel_lim_y0.0 decel_lim_theta-3.2 vx_samples20 vy_samples5 vtheta_samples20 sim_time1.7 linear_granularity0.05 angular_granularity0.025 transform_tolerance0.2 xy_goal_tolerance0.25 trans_stopped_velocity0.25 short_circuit_trajectory_evaluationTrue statefulTrue critics"RotateToGoal" "Oscillation" "BaseObstacle" "GoalAlign" "PathAlign" "PathDist" "GoalDist" BaseObstacle.scale0.02 PathAlign.scale32.0 PathAlign.forward_point_distance0.1 GoalAlign.scale24.0 GoalAlign.forward_point_distance0.1 PathDist.scale32.0 GoalDist.scale24.0 RotateToGoal.scale32.0 RotateToGoal.slowing_factor5.0 RotateToGoal.lookahead_time-1.0
local_costmap local_costmap ros__parameters update_frequency5.0 publish_frequency2.0 global_frameodom robot_base_framebase_link use_sim_timeFalse rolling_windowtrue width3 height3 resolution0.05 robot_radius0.22 plugins"voxel_layer" "inflation_layer" inflation_layer plugin"nav2_costmap_2d::InflationLayer" cost_scaling_factor3.0 inflation_radius0.55 voxel_layer plugin"nav2_costmap_2d::VoxelLayer" enabledTrue publish_voxel_mapTrue origin_z0.0 z_resolution0.05 z_voxels16 max_obstacle_height2.0 mark_threshold0 observation_sourcesscan scan topic/scan max_obstacle_height2.0 clearingTrue markingTrue data_type"LaserScan" raytrace_max_range3.0 raytrace_min_range0.0 obstacle_max_range2.5 obstacle_min_range0.0 static_layer plugin"nav2_costmap_2d::StaticLayer" map_subscribe_transient_localTrue always_send_full_costmapTrue
global_costmap global_costmap ros__parameters update_frequency1.0 publish_frequency1.0 global_framemap robot_base_framebase_link use_sim_timeFalse robot_radius0.22 resolution0.05 track_unknown_spacetrue plugins"static_layer" "obstacle_layer" "inflation_layer" obstacle_layer plugin"nav2_costmap_2d::ObstacleLayer" enabledTrue observation_sourcesscan scan topic/scan max_obstacle_height2.0 clearingTrue markingTrue data_type"LaserScan" raytrace_max_range3.0 raytrace_min_range0.0 obstacle_max_range2.5 obstacle_min_range0.0 static_layer plugin"nav2_costmap_2d::StaticLayer" map_subscribe_transient_localTrue inflation_layer plugin"nav2_costmap_2d::InflationLayer" cost_scaling_factor3.0 inflation_radius0.55 always_send_full_costmapTrue
map_server ros__parameters use_sim_timeFalse # Overridden in launch by the "map" launch configuration or provided default value. # To use in yaml, remove the default "map" value in the tb3_simulation_launch.py file & provide full path to map below. yaml_filename""
map_saver ros__parameters use_sim_timeFalse save_map_timeout5.0 free_thresh_default0.25 occupied_thresh_default0.65 map_subscribe_transient_localTrue
planner_server ros__parameters expected_planner_frequency20.0 use_sim_timeFalse planner_plugins"GridBased" GridBased plugin"nav2_navfn_planner/NavfnPlanner" tolerance0.5 use_astarfalse allow_unknowntrue
smoother_server ros__parameters use_sim_timeFalse smoother_plugins"simple_smoother" simple_smoother plugin"nav2_smoother::SimpleSmoother" tolerance1.0e-10 max_its1000 do_refinementFalse
behavior_server ros__parameters costmap_topiclocal_costmap/costmap_raw footprint_topiclocal_costmap/published_footprint cycle_frequency10.0 behavior_plugins"spin" "backup" "drive_on_heading" "assisted_teleop" "wait" spin plugin"nav2_behaviors/Spin" backup plugin"nav2_behaviors/BackUp" drive_on_heading plugin"nav2_behaviors/DriveOnHeading" wait plugin"nav2_behaviors/Wait" assisted_teleop plugin"nav2_behaviors/AssistedTeleop" global_frameodom robot_base_framebase_link transform_tolerance0.1 use_sim_timeFalse simulate_ahead_time2.0 max_rotational_vel1.0 min_rotational_vel0.4 rotational_acc_lim3.2
robot_state_publisher ros__parameters use_sim_timeFalse
waypoint_follower ros__parameters use_sim_timeFalse loop_rate20 stop_on_failurefalse waypoint_task_executor_plugin"wait_at_waypoint" wait_at_waypoint plugin"nav2_waypoint_follower::WaitAtWaypoint" enabledTrue waypoint_pause_duration200
velocity_smoother ros__parameters use_sim_timeFalse smoothing_frequency20.0 scale_velocitiesFalse feedback"OPEN_LOOP" max_velocity0.26 0.0 1.0 min_velocity-0.26 0.0 -1.0 max_accel2.5 0.0 3.2 max_decel-2.5 0.0 -3.2 odom_topic"odom" odom_duration0.1 deadband_velocity0.0 0.0 0.0 velocity_timeout1.0该参数表配置了导航launch文件中,启动的每个节点需要的参数。