2、环境搭建
注:配套的虚拟机已经搭建好环境,无需要再做搭建。这里是说明在新的主板或者虚拟机上搭建需要进行的工作。
虚拟机环境的配置如下:
Ubuntu20.04 + ROS-Noetic+ OpenCV 4.2+Python3.8
2.1、安装相关依赖
终端输入,
sudo apt install libgflags-dev ros-$ROS_DISTRO-image-geometry ros-$ROS_DISTRO-camera-info-manager ros-$ROS_DISTRO-image-transport ros-$ROS_DISTRO-image-publisher libgoogle-glog-dev libusb-1.0-0-dev libeigen3-dev2.2、创建ROS工作空间
以在~目录下,建立名为orbbec_ws的工作空间为例。
终端输入,
xxxxxxxxxxmkdir -p ~/orbbec_ws/src解压""源码""文件夹,把其中的Orbbec-ros-sdk文件夹复制到~/orbbec_ws/src下,然后输入以下命令进行编译,
xxxxxxxxxxcd ~/orbbec_wscatkin_make编译完成后,输入以下命令,打开编辑~/.bashrc文件,
xxxxxxxxxxsudo vim ~/.bashrc按下【i】键进入编辑模式,添加工作空间到环境变量中,在文件最后一句加上,
xxxxxxxxxxsource ~/orbbec_ws/devel/setup.bash按下【ESC】退出编辑模式,然输入【:】在后边输入【wq】按下回车,保存并且退出,然后输入以下命令重新刷新,
xxxxxxxxxxsource ~/.bashrc2.3、安装相机udev规则文件
终端输入,
xxxxxxxxxxcd ~/orbbec_ws/src/orbbec-ros-sdk/scriptsudo chmod 777 install.shsudo bash install.sh
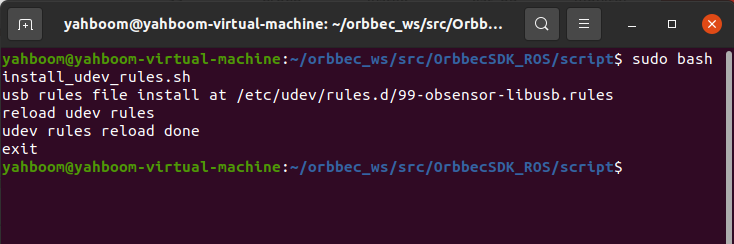
安装结束后,最好是重启一下。
输入以下指令进行验证,
xxxxxxxxxx#astraproplusll /dev/astro_pro_plus#gemini2ll /dev/OrbbecGemini2出现以下内容说明绑定成功
astraproplus显示,

gemini2显示,

2.4、使用相机
终端输入,
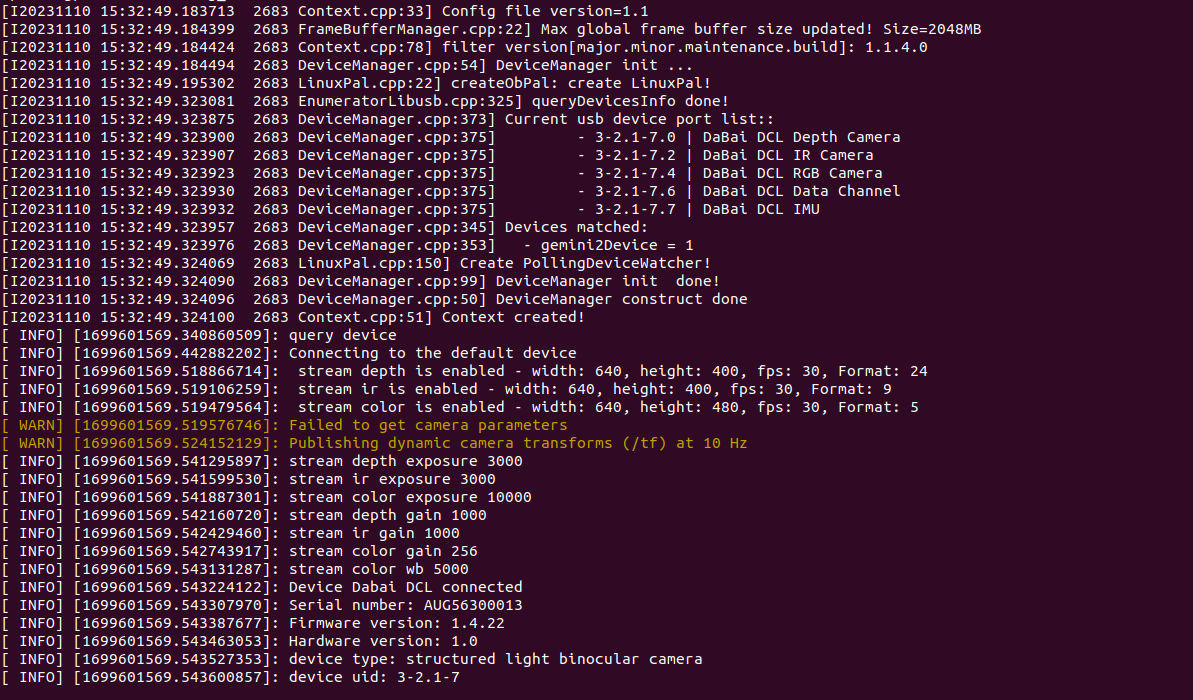
xxxxxxxxxx#astraproplusroslaunch orbbec_camera astra.launch#gemini2roslaunch orbbec_camera gemini2.launchastraproplus相机
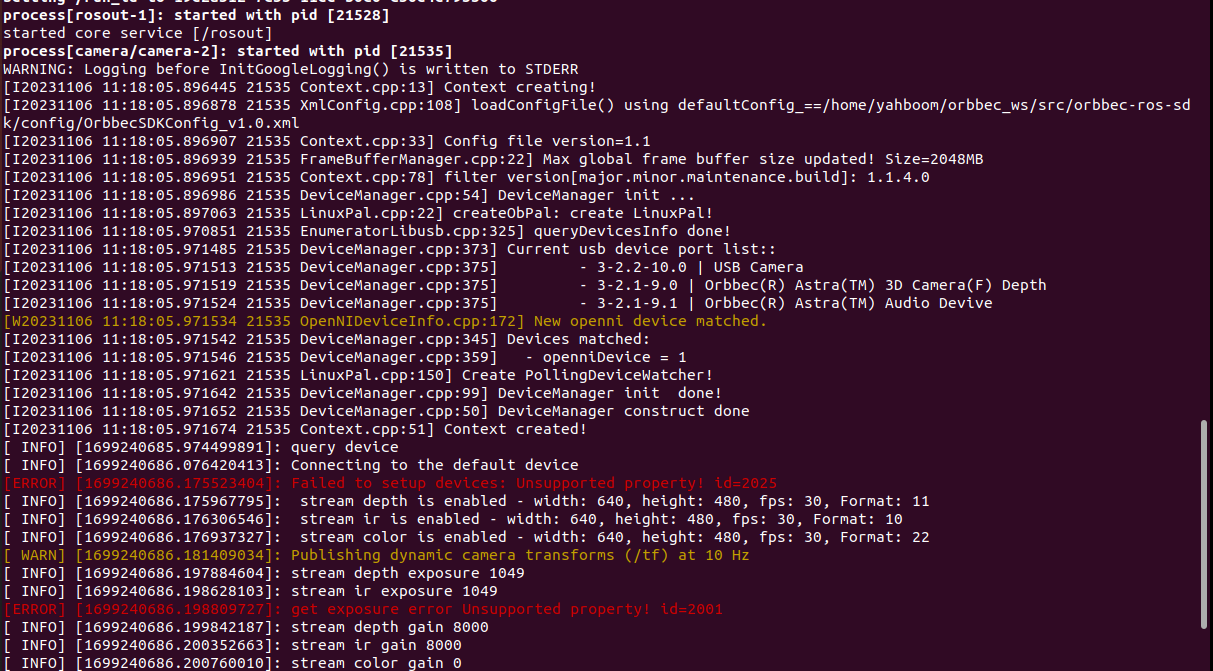
出现的红色error和黄色warnning是因为该sdk适配多款相机,没有找到对应相机型号,终端打印的log,不影响使用。
gemini2相机
使用rviz查看图像,终端输入,
xxxxxxxxxxrviz
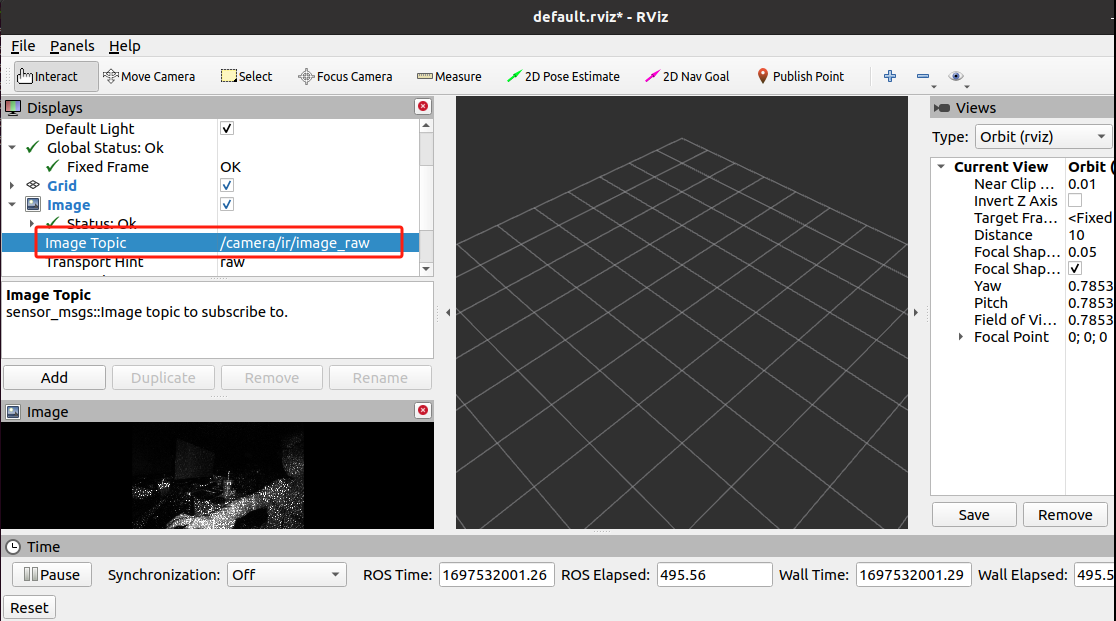
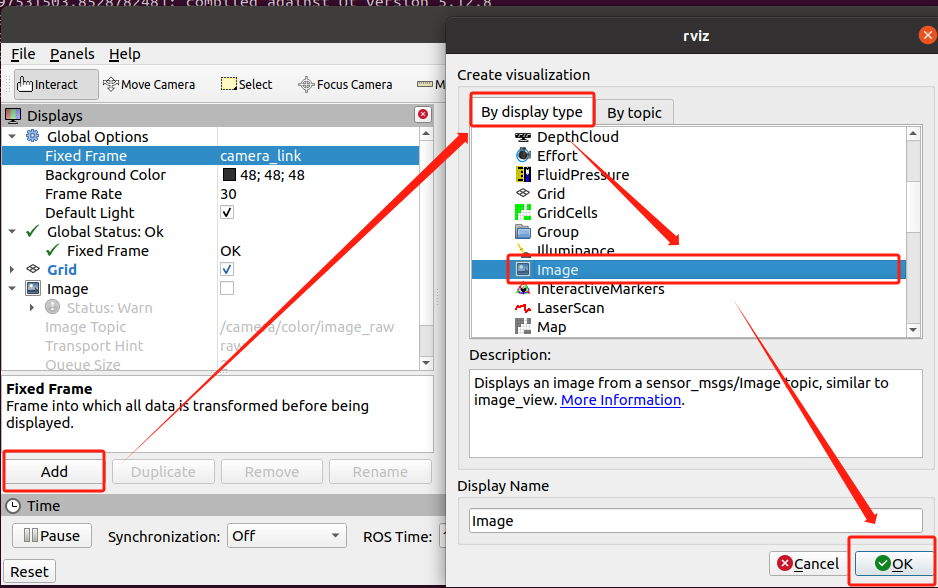
把Fixed Frame修改成camera_link,然后安装下图所示,添加Image显示插件,
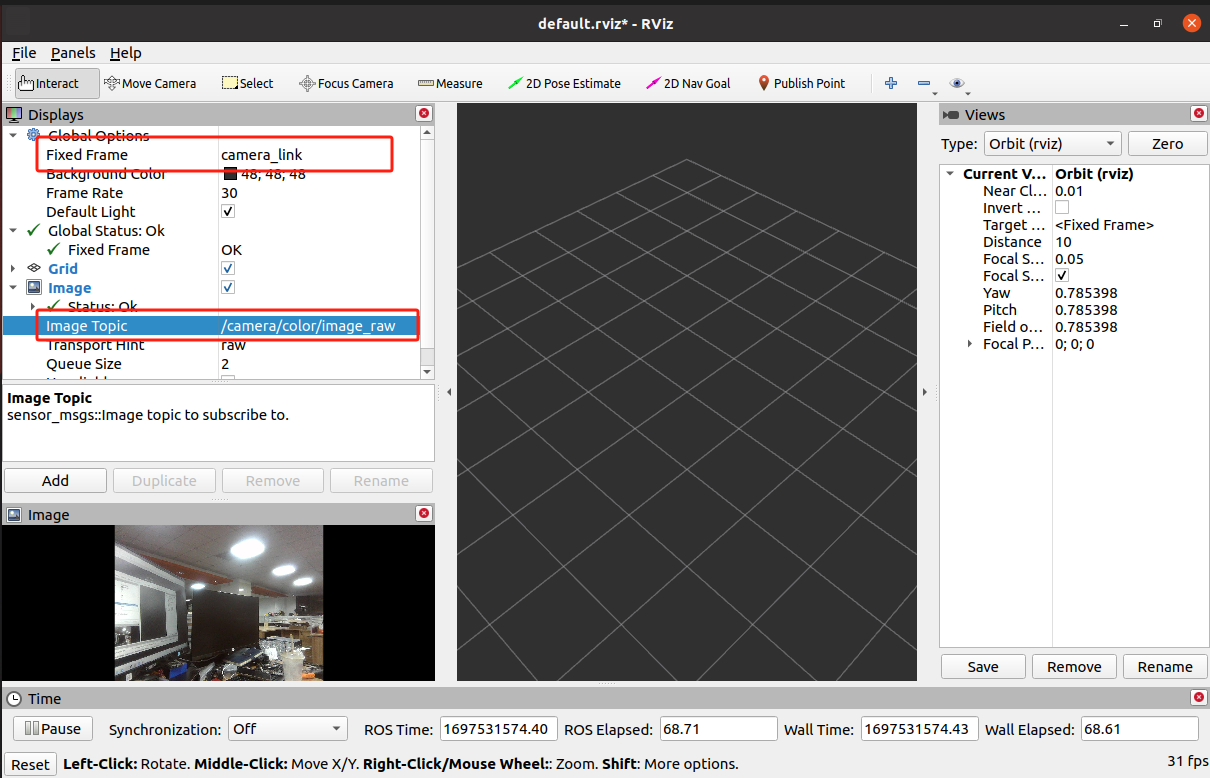
然后,点击Image,在Image Topic栏选择显示彩色图像:/camera/color/image_raw
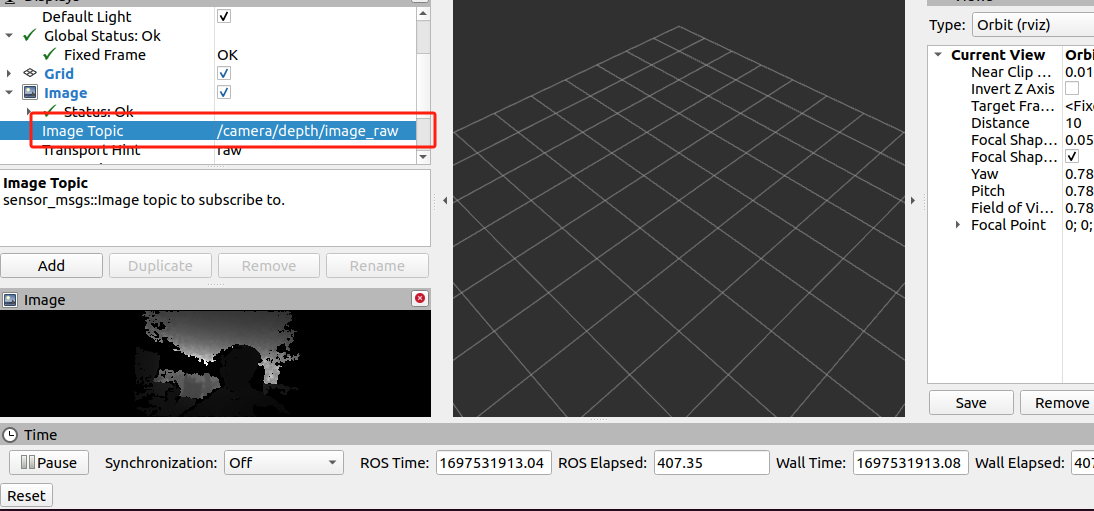
同样在Image Topic栏选择显示深度图像:/camera/depth/image_raw
同样在Image Topic栏选择显示IR图像:/camera/ir/image_raw