手机APP遥控
1、手机扫码安装APP
Android系统用户请打开Google Play应用商店搜索【YahboomRobot】,或者打开手机浏览器,扫描下方二维码,下载并安装【YahboomRobot】APP。
IOS系统用户请打开App store应用平台搜索【YahboomRobot】,或者打开扫码器,扫描下方二维码,下载并安装【YahboomRobot】APP。
如果手机里已经安装了最新版的【YahboomRobot】APP则不需要再次安装。

2、启动机器人
产品中提供的TF卡/U盘默认包含镜像系统,将TF卡/U盘插入主板TF卡槽/USB接口,组装好Muto机器人即可正常开机,无需重新配置镜像。
按下Muto机器人尾部的开关按钮,开关为自锁类型,即按下后不回弹且机器人处于持续通电状态,开关绿灯常亮。Muto机器人站立起来,等待约1.5分钟,系统启动完成后蜂鸣器鸣笛三声‘滴’,此时可以看到OLED显示的信息。
Jetson nano系统用户名:jetson 密码:yahboom
树莓派系统用户名:pi 密码:yahboom
3、APP连接机器人
出厂系统自带发射热点信号【Muto_WIFI】,密码【12345678】,可以先使用手机连接机器人的热点信号组成局域网。或者将机器人与手机都连接到同一个路由器组成局域网。
选择设备
首次打开【YahboomRobot】APP,根据所购买的机器人型号,需要选择【ROS机器人】中的【Muto】设备。
建立网络连接
在IP栏填写机器人的OLED显示的IP地址,Port栏填6000,Video栏填6500,点击【连接】,连接成功之后将会自动跳转到主控制界面。

注意:连接设备前,请确认手机连接了机器人的热点信号,或者手机与机器人连接到相同的路由器上。而且已经启动了App控制程序(出厂系统默认开机启动App控制程序)。
4、APP功能介绍
Muto机器人的APP主界面主要分为五个模块,每个模块都对应不同的功能。

机体遥控
【机体遥控】界面功能示意如下。

Part 1. 速度:控制机器人的运动速度,可选择低速、中速或高速。
Part 2. 高度:控制机器人的身体高度,可选择低、中或高。
Part 3. 步宽:控制机器人行走一步的宽度。
Part 4. 控制方式:左边选择按键控制,向上为前进,向下为后退,向左为左平移,向右为右平移,中间按钮为停止。右边选择摇杆控制,向上为前进,向下为后退,向左为左旋,向右为右旋,中间为停止。
Part 5. 抬头/低头:控制机器人抬头/低头。
Part 6. 左旋/右旋:控制机器人原地左旋/原地右旋。
表演模式
【表演模式】界面功能示意如下。

Part 1. 预设的八个动作,每次点击运行一次。
Part 2. 复位按钮:机器人恢复为默认姿态。
全屏控制
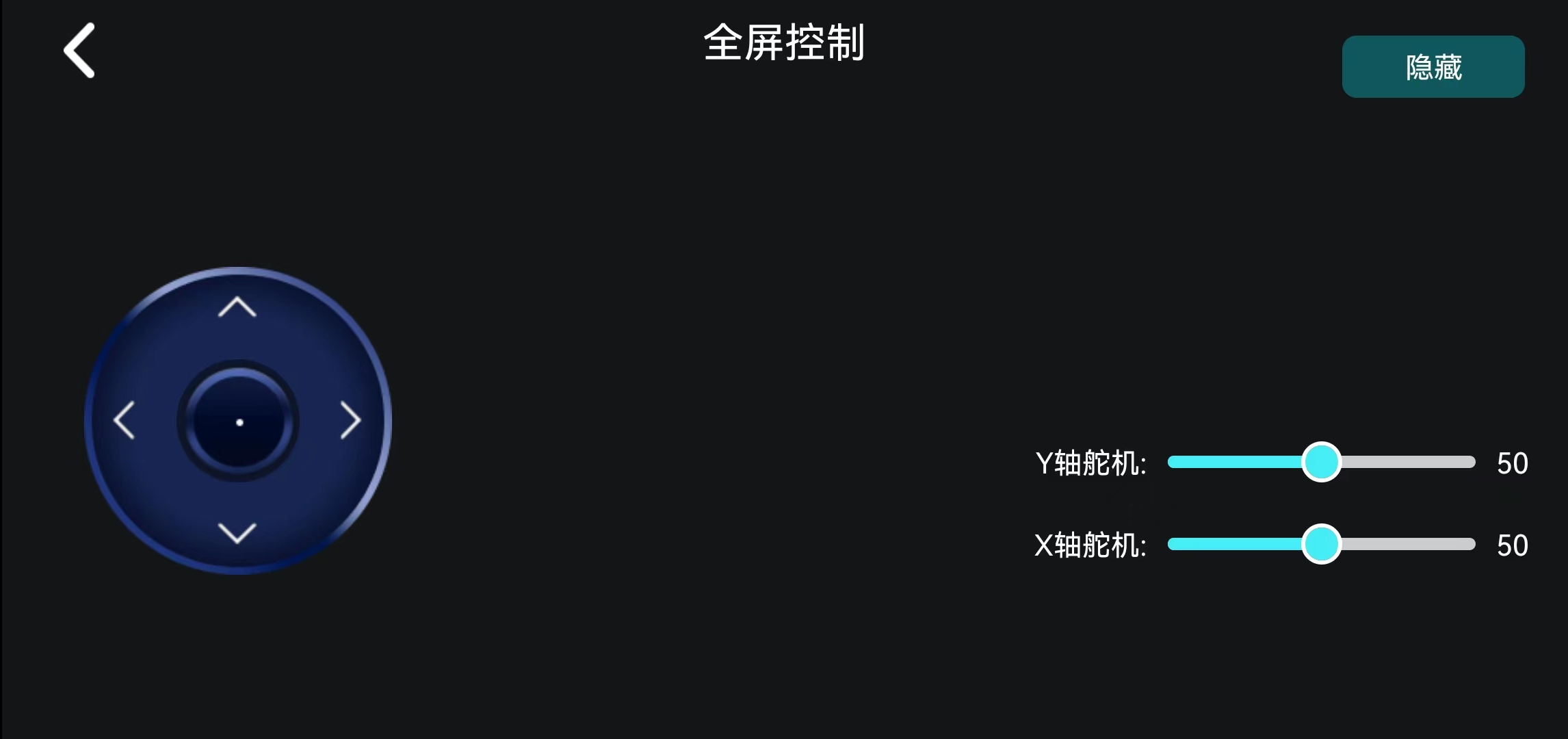
Part 1. 隐藏:隐藏控件,保留全屏摄像头画面,再次点击显示控件。
Part 2. 摇杆:控制机器人移动位置。
Part 3. X/Y轴舵机:控制摄像头舵机云台转动。
数据监测
【数据监测】界面功能示意如下。
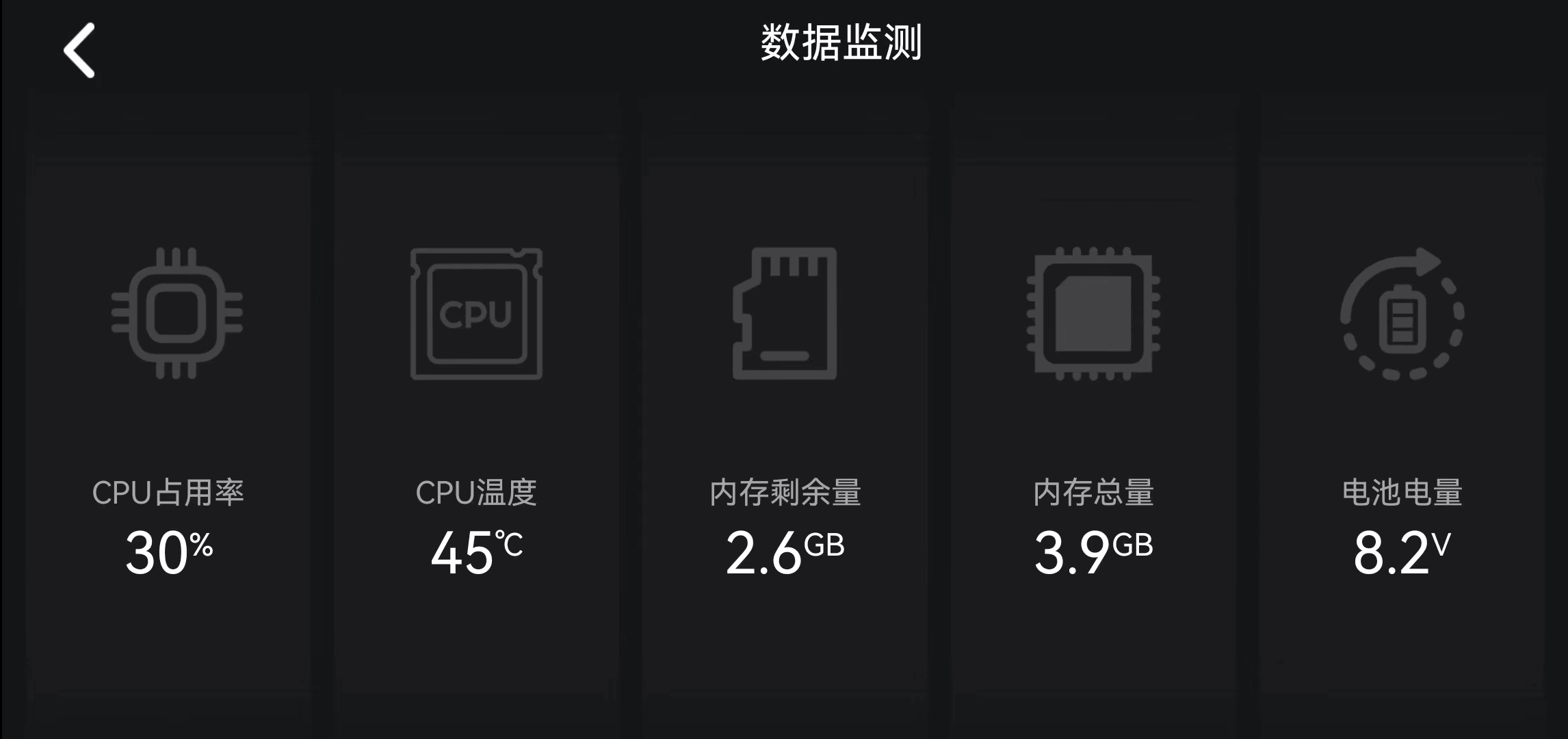
Part 1. CPU占用率:显示主板CPU的占用率。
Part 2. CPU温度:显示主板CPU的温度。
Part 3. 内存剩余量:显示主板系统内存剩余多少G空间。
Part 4. 内存总量:显示主板内存总共多少G空间。
Part 5. 电池电量:显示机器人电池电压多少伏。
机器人校准
注:机器人出厂已校准完毕,正常情况下不需要校准。由于机器人校准功能比较特殊,操作不当可能会引起机器人运动不流畅等问题。
进入机器人校准界面前,APP会提示以下内容,请点击下一步。
【机器人校准】界面功能示意图如下。

如上图所示,左边图片表示机器人选择的腿,图标亮则表示选中,底部保存按钮用于保存数据到机器人底板。右边三个滑动条分别控制选中腿的三个舵机。
请将Muto机器人平放在地面上,并面向自己,查看某一条腿悬空不着地,则选择对应的腿图标(图标亮则表示选中,此时右边三个滑动条数值都为0),点击保存按钮,清空以前保存的数据。再调节右边三个滑动条,调节到有问题的腿着地。然后再次点击保存按钮,将数据保存到机器人舵机。