1、手机APP遥控教程
1、手机APP遥控教程1.1、手机扫码安装APP1.2、APP连接Rosmaster1.2.1、选择设备1.2.2、建立网络连接1.3、APP功能介绍1.3.1、遥控1.3.2、麦克纳姆1.3.3、炫彩车灯1.3.4、使用指引
1.1、手机扫码安装APP
Android系统用户请打开Google Play应用商店搜索【MakerControl】,或者打开手机浏览器,扫描下方二维码,下载并安装【MakerControl】APP。
IOS系统用户请打开App store应用平台搜索【MakerControl】,或者打开扫码器,扫描下方二维码,下载并安装【MakerControl】APP。
如果手机里已经安装了最新版的【MakerControl】APP则不需要再次安装。

1.2、APP连接Rosmaster
Rosmaster出厂系统自带发射热点信号【ROSMASTER】,密码【12345678】,可以先使用手机连接Rosmaster的热点信号组成局域网。或者将Rosmaster与手机都连接到同一个路由器组成局域网。
1.2.1、选择设备
首次打开【MakerControl】APP,根据所购买的机器人型号,需要选择【ROS机器人】中的【Rosmaster X3】设备
1.2.2、建立网络连接
点击右上角的WiFi图标,连接ROSMASTER机器人。

在IP一栏填写ROSMASTER机器人中OLED显示的IP地址,Port和Video一栏使用默认参数即可,点击【连接】,连接成功之后将自动跳转到主控制界面,同时右上角的WiFi图标不再出现禁止符号。

注意:连接设备前,请确认手机连接了ROSMASTER热点信号,或者手机与ROSMASTER小车连接到相同的路由器上。而且已经启动了app大程序(出厂系统默认开机启动app大程序)。
1.3、APP功能介绍
Rosmaster的APP主界面总共分为三个模块,每个模块都对应不同的功能。
1.3.1、遥控

在主界面点击【遥控】图标,会出现以下界面。

Part 1. 左边的控制控件:上方可以调节机器人运行的直线速度和转弯速度,下方可以控制机器人完成前进后退、向左向右和停止。
Part 2. 中间的摄像头显示画面:可以看到Rosmaster前方画面,画面支持放大/缩小。画面左上角显示的是当前摄像头的帧率。
Part 3. 右边的上方按钮控制:可以选择三种控制方式,包括重力感应,按键控制,摇杆控制,最后一个按钮按下可控制蜂鸣器鸣笛,松开手蜂鸣器关闭。机械臂版本可点击机械臂图标打开机械臂控制界面。
Part 4. 自稳模式:开启自稳模式,小车接收到停车指令,会立刻刹车停止,关闭自稳模式,小车接收到停止指令,会自由滑行后停止。
Part 5. 右边下方两个按钮控制机器人左旋和右旋。
1.3.2、麦克纳姆

在主界面点击【麦克纳姆】图标,会出现以下界面。(此部分为麦克纳姆轮车型专有功能)
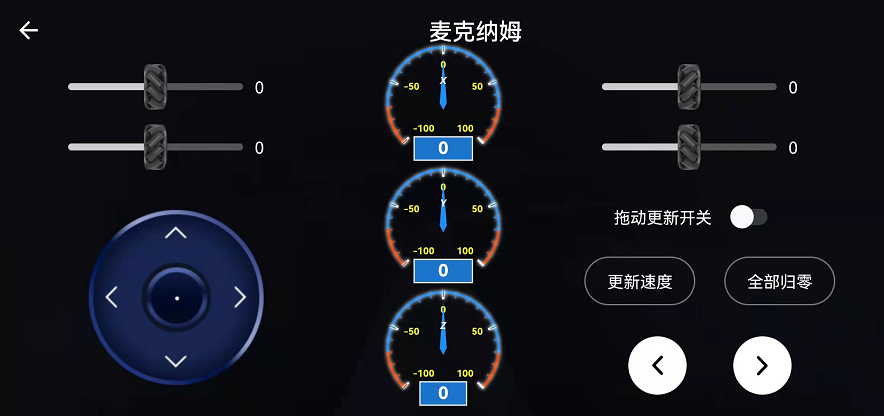
四个滑竿代表了机器人四个轮子,中间为停止,向左滑动轮子反转,向右滑动轮子正转,滑动后,选择【更新速度】,机器人会更新速度,轮子会转动,打开【拖动更新开关】,滑动滑竿立即更新机器人轮子的速度,点击【全部归零】,机器人停止动作,建议测试时先垫起来机器人,确定无误在放在地上看是否为你想要的运动方式。最下方两个白色按钮为控制机器人左旋右旋。
中间表盘(从上至下): 1.X:X轴方向速度;2.Y:Y轴方向速度;3.Z:Z轴方向速度。
1.3.3、炫彩车灯

在主界面点击【炫彩车灯】图标,会出现以下界面。

炫彩车灯总共分为三部分。
Part 1. 左上部分【颜色切换】:此功能可以实时修改灯条的RGB颜色,直接拖动【R】【G】【B】的拖动条,就可以看到Rosmaster尾部的RGB灯条实时变化炫酷灯效。
Part 2. 左下部分【固定颜色切换】:此功能可以让RGB灯条显示红色、绿色、蓝色、黄色、紫色、青色、白色、关闭。同时还可以调节单色呼吸灯的颜色。
Part 3. 右边【炫酷特效】:每次点击一个按钮都会展示特定的特效,分别有流水灯、跑马灯、星光点点、单色呼吸灯、渐变灯功能,再次点击改按钮退出特效;底下的拖动条可以改变灯光特效的速度,默认为5,最快为1,最慢为10。
1.3.4、使用指引

此部分功能为机械臂调节中位时使用,根据APP指引完成操作即可。不带机械臂版本不需要此功能。