1、颜色识别
1.1、实验目标
本节课主要学习颜色识别功能,根据颜色的LAB值,框出相同颜色的物品。
本次实验的参考代码路径为:CanMV\05-AI\color_recognition.py
1.2、实验过程
模块的出厂固件已经集成AI视觉算法模块,如果下载过其他固件,请烧录回出厂固件再进行实验。
- 导入相关库,并初始化摄像头和LCD显示屏。
ximport sensor, image, time, lcdlcd.init()sensor.reset()sensor.set_pixformat(sensor.RGB565)sensor.set_framesize(sensor.QVGA)sensor.skip_frames(time = 2000)sensor.set_auto_gain(False)sensor.set_auto_whitebal(False)clock = time.clock()
- 在摄像头画面中绘制一个50*50大小的白色方框,此时的功能为提示用户将要识别的颜色放入方框内。
xxxxxxxxxxr = [(320//2)-(50//2), (240//2)-(50//2), 50, 50]for i in range(50):img = sensor.snapshot()img.draw_rectangle(r)lcd.display(img)
- 等到方框又白色变成绿色,则开始学习颜色的LAB值,多次读取数值,并取平均值作为学习的LAB值结果。
xxxxxxxxxxprint("Learning thresholds...")threshold = [50, 50, 0, 0, 0, 0] # Middle L, A, B values.for i in range(50):img = sensor.snapshot()hist = img.get_histogram(roi=r)lo = hist.get_percentile(0.01) # Get the CDF of the histogram at the 1% range (ADJUST AS NECESSARY)!hi = hist.get_percentile(0.99) # Get the CDF of the histogram at the 99% range (ADJUST AS NECESSARY)!# Average in percentile values.threshold[0] = (threshold[0] + lo.l_value()) // 2threshold[1] = (threshold[1] + hi.l_value()) // 2threshold[2] = (threshold[2] + lo.a_value()) // 2threshold[3] = (threshold[3] + hi.a_value()) // 2threshold[4] = (threshold[4] + lo.b_value()) // 2threshold[5] = (threshold[5] + hi.b_value()) // 2for blob in img.find_blobs([threshold], pixels_threshold=100, area_threshold=100, merge=True, margin=10):img.draw_rectangle(blob.rect())img.draw_cross(blob.cx(), blob.cy())img.draw_rectangle(r, color=(0,255,0))lcd.display(img)
- 当颜色学习完成,新建一个while循环,开始识别摄像头画面中的颜色,分析与上一步学习到的颜色的LAB值是否相符合,如果符合则框出来对应的颜色块。
xxxxxxxxxxprint("Thresholds learned...")print("Start Color Recognition...")while(True):clock.tick()img = sensor.snapshot()for blob in img.find_blobs([threshold], pixels_threshold=100, area_threshold=100, merge=True, margin=10):img.draw_rectangle(blob.rect())img.draw_cross(blob.cx(), blob.cy())lcd.display(img)print(clock.fps())
1.3、实验效果
将K210模块通过microUSB数据线连接到电脑上,CanMV IDE点击连接按钮,连接完成后点击运行按钮,运行例程代码。也可以将代码作为main.py下载到K210模块上运行。
等待系统初始化完成后,LCD显示摄像头画面,并且屏幕中间有一个白色的方框,请将要识别的颜色放到白色方框内,白色方框持续时间大约3秒。

等到白色方框变为绿色方框时,此时系统开始学习绿色方框内的颜色LAB值,还会出现其他白色的方框作为预览效果,大约5秒后,绿色方框消失,则表示学习完成。
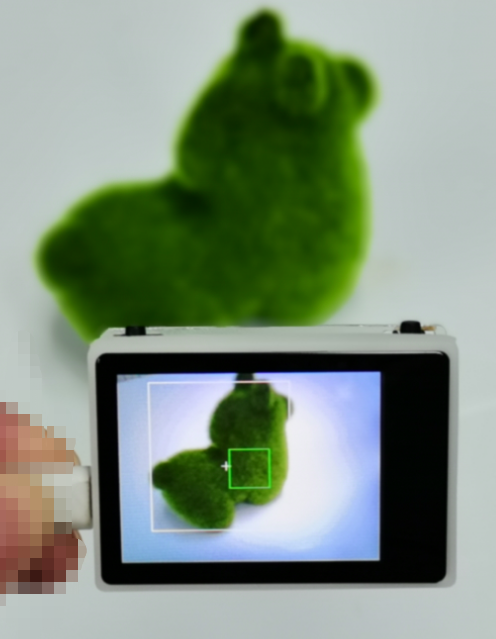
此时将摄像头朝向要识别的颜色,系统会自动框出识别的颜色。

1.4、实验总结
颜色识别的功能主要是分析颜色的LAB值,先把要识别的颜色放方框内,然后系统会根据方框内读取到的颜色的LAB值,再与摄像头采集到的颜色的LAB值作为分析对比,如果符合要求则画出方框,表示识别到该颜色。由于识别颜色存在误差,最好是在识别颜色与背景颜色差距较大情况下识别,如果背景颜色与识别的颜色相近,误识别的几率会增加。