由于机械臂安装过程中会存在角度安装误差的情况,无法保证每一个机械臂安装后的夹爪或者位置百分百相同,所以这里增加一个机械臂调节偏移量的解决方案。
如果发现用APP控制机械臂时,夹爪已经设置为最大值了,但是夹爪依然存在缝隙,此时就需要调节机械臂的偏移量,达到最大值刚好夹紧。
举个例子:假如APP中设置夹爪的值为最大值,但是距离夹紧还需要10,那么就将9号舵机的偏移量修改为10就可以。
找到Transbot/arm_transbot.py文件,然后修改self.__offset_9 = 10。
如果是夹爪太紧,可以将self.__offset_9设置为负数来放松夹爪。
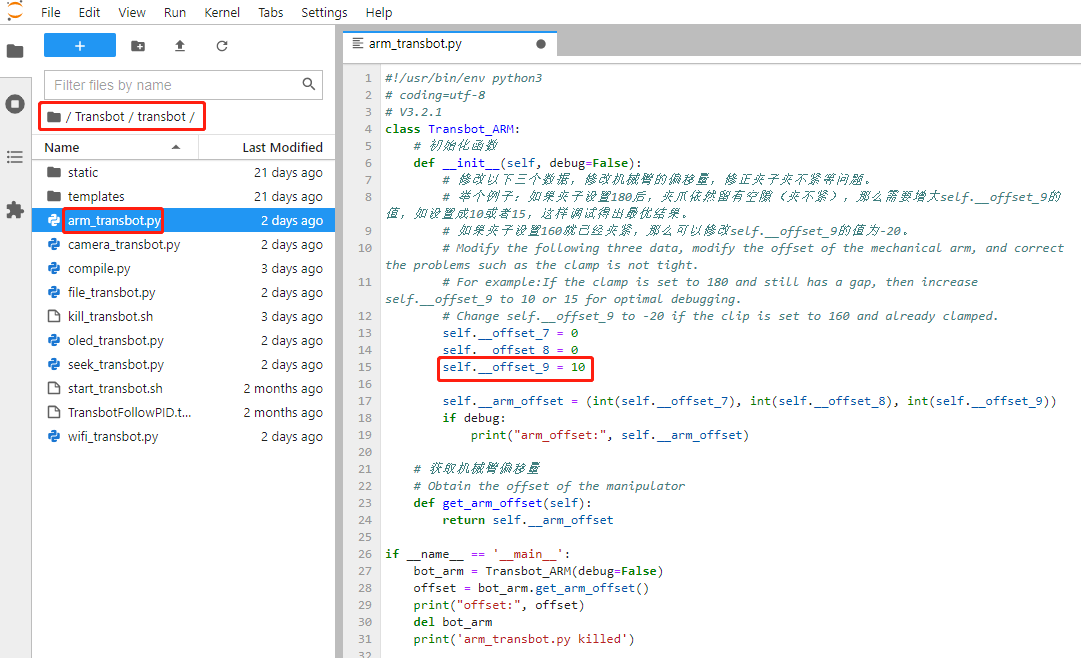
其他两个self.__offset_7 和 self.__offset_8则对应另外两个关节的偏移量。
修改数据后按Ctrl+S保存,再重启一下大程序或者Transbot即可看到效果。