控制PWM舵机云台
1、实验目标
控制Transbot上的PWM舵机云台上下左右来回转动。
2、实验准备
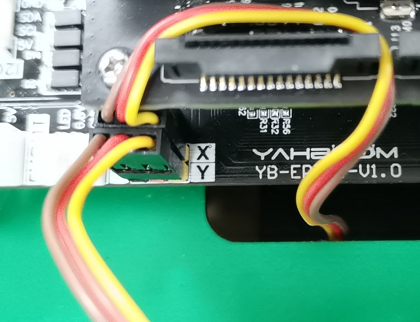
下图片中红色方框中位置就是舵机云台的接口,总共有两个舵机接口,其中,黑色接口为GND,红色接口为5V电源正极,黄色接口为信号,分别标记X和Y,表示两个舵机接口。

控制左右的舵机插入X接口,控制上下的舵机插入Y接口。舵机接口必须对应颜色插入,不可插反。
普通相机版本才需要插入舵机X和舵机Y,深度相机版本只需要插入舵机X,不需要插入舵机Y。
PWM舵机云台需要用到的Transbot_Lib库函数:
set_pwm_servo(servo_id, angle)参数解释:舵机控制,servo_id:对应ID编号:X = 1, Y = 2,angle:对应舵机角度值
servo_id=[1, 2],angle=[0, 180]
返回值:无。
3、实验效果
请查看课程配套视频。
4、程序源码
将Transbot机器人打开电源开机,并打开树莓派或者远程电脑的浏览器进入Jupyter lab编辑器。
参考代码路径:/home/pi/py_install_V3.2.5/py_install/Samples/5.pwm_servo.ipynb