手机APP遥控教程
手机APP遥控教程1、手机扫码安装APP2、APP连接Transbot2.1、选择设备2.2、连接WiFi网络2.3、搜索设备2.4、连接设备2.5、IP连接设备3、APP功能介绍3.1、遥控3.2、炫彩车灯3.3、图像美化3.4、激光雷达3.5、AR世界3.6、智能追踪3.7、智能巡逻3.8、自动驾驶3.9、使用指引
1、手机扫码安装APP
Android系统用户请打开Google Play应用商店搜索【YahBoomRobot】,或者打开手机浏览器,扫描下方二维码,下载并安装【YahBoomRobot】APP。
IOS系统用户请打开App store应用平台搜索【YahBoomRobot】,或者打开扫码器,扫描下方二维码,下载并安装【YahBoomRobot】APP。
如果手机里已经安装了最新版的【YahBoomRobot】APP则不需要再次安装。

2、APP连接Transbot
Transbot出厂系统自带发射热点信号【Transbot】,密码【12345678】,可以先使用手机连接Transbot的热点信号组成局域网。或者将Transbot与手机都连接到同一个路由器组成局域网。
2.1、选择设备
首次打开【YahBoomRobot】APP,需要选择【ROS机器人】中的【Transbot】设备
2.2、连接WiFi网络
如果已经连接了Transbot的热点信号,或者已经连接WiFi信号则点击【跳过】此步骤。
此步骤只在APP首次运行时提示一次,操作一次后自动隐藏,下次需要使用摄像头WiFi配网方式请点击下方【搜索设备】右上角的【配置网络】弹出。
开启Transbot的电源后听到蜂鸣器连续鸣笛三声,则可以长按扩展板上的K1键约2秒进入WiFi配网模式,此时WiFi指示灯闪烁,并且蜂鸣器B-B一直响,点击【下一步】。

由于WiFi配网需要获取地理位置信息权限,所以点击【仅使用期间允许】。如果不小心点了【禁止】,可以先关闭APP,再重新打开APP允许权限。

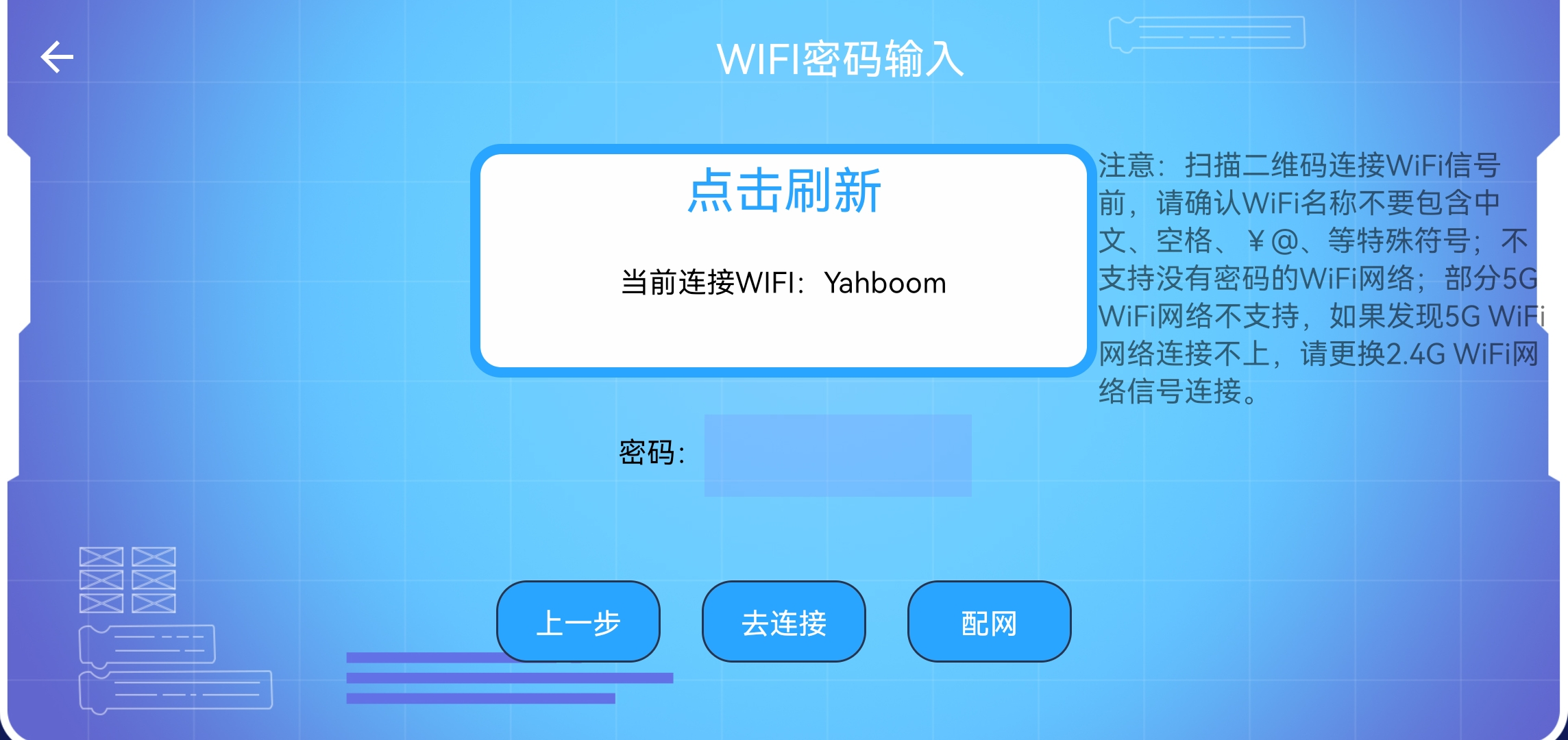
由于第一次进入可能存在刷新不及时的问题,所以需要自己手动点击【点击刷新】,看到当前手机连接的WiFi信号名称,在下方【密码】那一栏输入WiFi密码,然后点击【配网】。
按照下图方式,将二维码放在摄像头正前方约20cm处,蜂鸣器长鸣一声则表示已读取到二维码信息,等待蜂鸣器连续鸣笛三声,WiFi指示灯保持常亮则连接成功,否则连接失败。如果连接失败请检查二维码信息和路由器信号,然后长按K1键进入配网模式重新连接。连接完成后请点击【确定】。

2.3、搜索设备
如果Transbot的大程序已经启动,APP会自动搜索设备,或者也可以手动点击【搜索设备】。
注意:搜索设备前请确认Transbot和手机的网络在同一局域网,例如连接同一个路由器,或者手机连接Transbot的热点。

2.4、连接设备
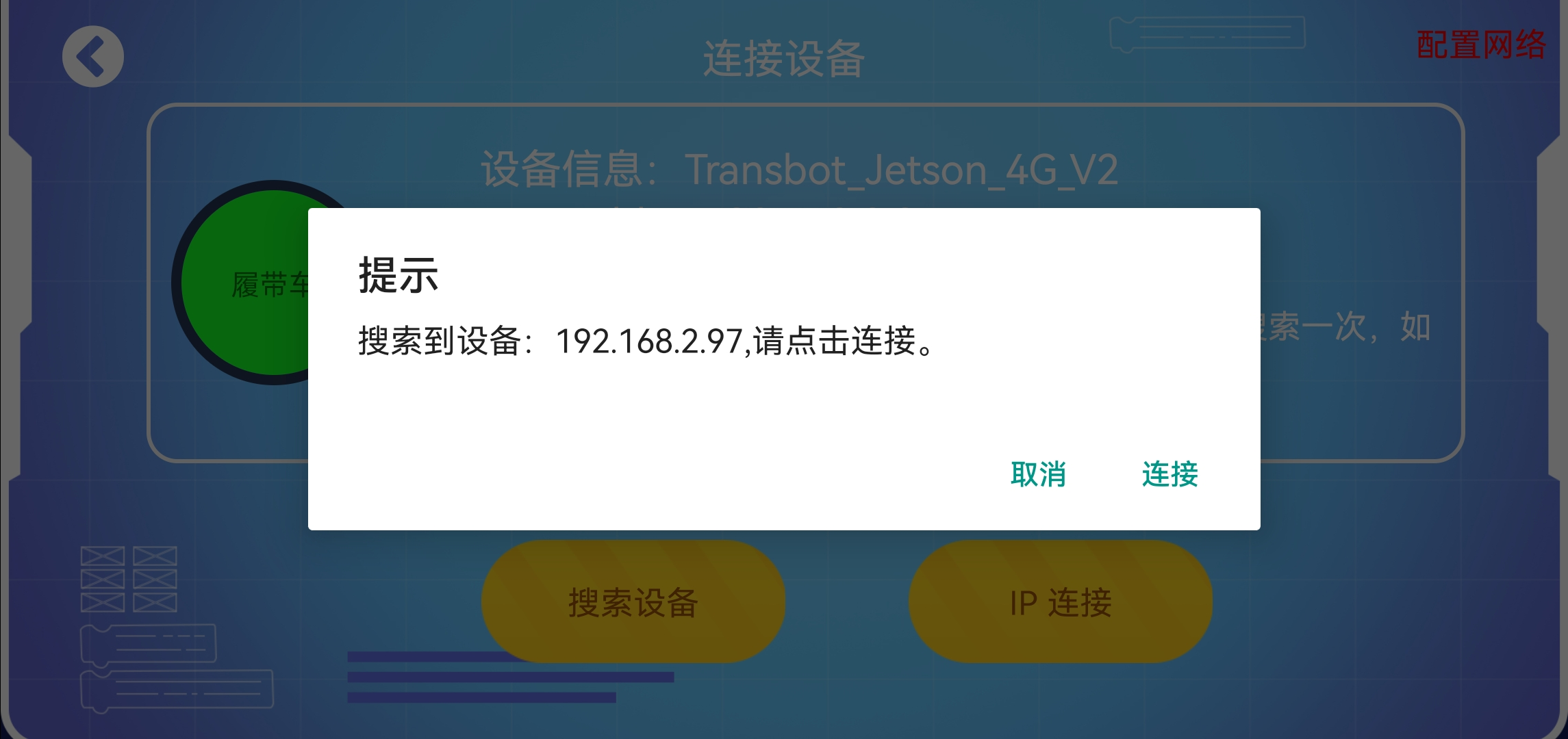
等待APP搜索到Transbot的大程序信息后,会自动弹出以下界面,点击【连接】。
2.5、IP连接设备
如果长时间没有搜索到设备,请使用【IP连接】功能。
请先查看Transbot的OLED屏上的IP地址,如下图所示,【IP】:输入Transbot的IP地址,【Port】:6000,【Video】:6500。

3、APP功能介绍
Transbot的APP主界面总共分为九个模块,每个模块都对应不同的功能。
3.1、遥控

在主界面点击【遥控】图标,会出现以下界面。

遥控界面下主要分为四个部分。
Part 1. 左边的控制控件:Transbot控制总共有三种方式,重力感应、按键控制、摇杆控制,可以实现前进后退,左转右转,左旋右旋等功能,底部还可以调节按键的控制速度。
Part 2. 中间的摄像头显示画面:可以看到Transbot前方画面,画面支持放大/缩小。画面左上角显示的是当前摄像头的帧率,后缀-X表示当前运行的功能编号。
Part 3. 右边的控制舵机云台、蜂鸣器和探照灯功能:当按下舵机云台按钮时,舵机会自动朝着一个方向转动,松开手自动停止,按一下中间按钮可以让舵机云台自动归位;蜂鸣器控制按钮设计则是模拟小车喇叭开关,按下按钮蜂鸣器响,松开手蜂鸣器关闭;探照灯按钮是一个开关,点击一下开灯,不需要按住,再次点击关灯。
Part 4. 右上角的机械臂遥控:点击后会跳进控制机械臂的界面,不仅有全屏视角,左边摇杆可以控制小车,右边可以控制机械臂。右上角还有全屏显示开关。

3.2、炫彩车灯

在主界面点击【炫彩车灯】图标,会出现以下界面。

炫彩车灯总共分为三部分。
Part 1. 左上部分【颜色切换】:此功能可以实时修改灯条的RGB颜色,直接拖动【R】【G】【B】的拖动条,就可以看到Transbot尾部的RGB灯条实时变化炫酷灯效。
Part 2. 左下部分【固定颜色切换】:此功能可以让RGB灯条显示红色、绿色、蓝色、黄色、紫色、青色、白色、关闭。同时还可以调节单色呼吸灯的颜色。
Part 3. 右边【炫酷特效】:每次点击一个按钮都会展示特定的特效,分别有流水灯、跑马灯、星光点点、单色呼吸灯、渐变灯功能,再次点击改按钮退出特效;底下的拖动条可以改变灯光特效的速度,默认为5,最快为1,最慢为10。
3.3、图像美化
在主界面点击【图像美化】图标,会出现以下界面。
左边的是原始摄像头画面,右边的是经过算法处理过的画面。
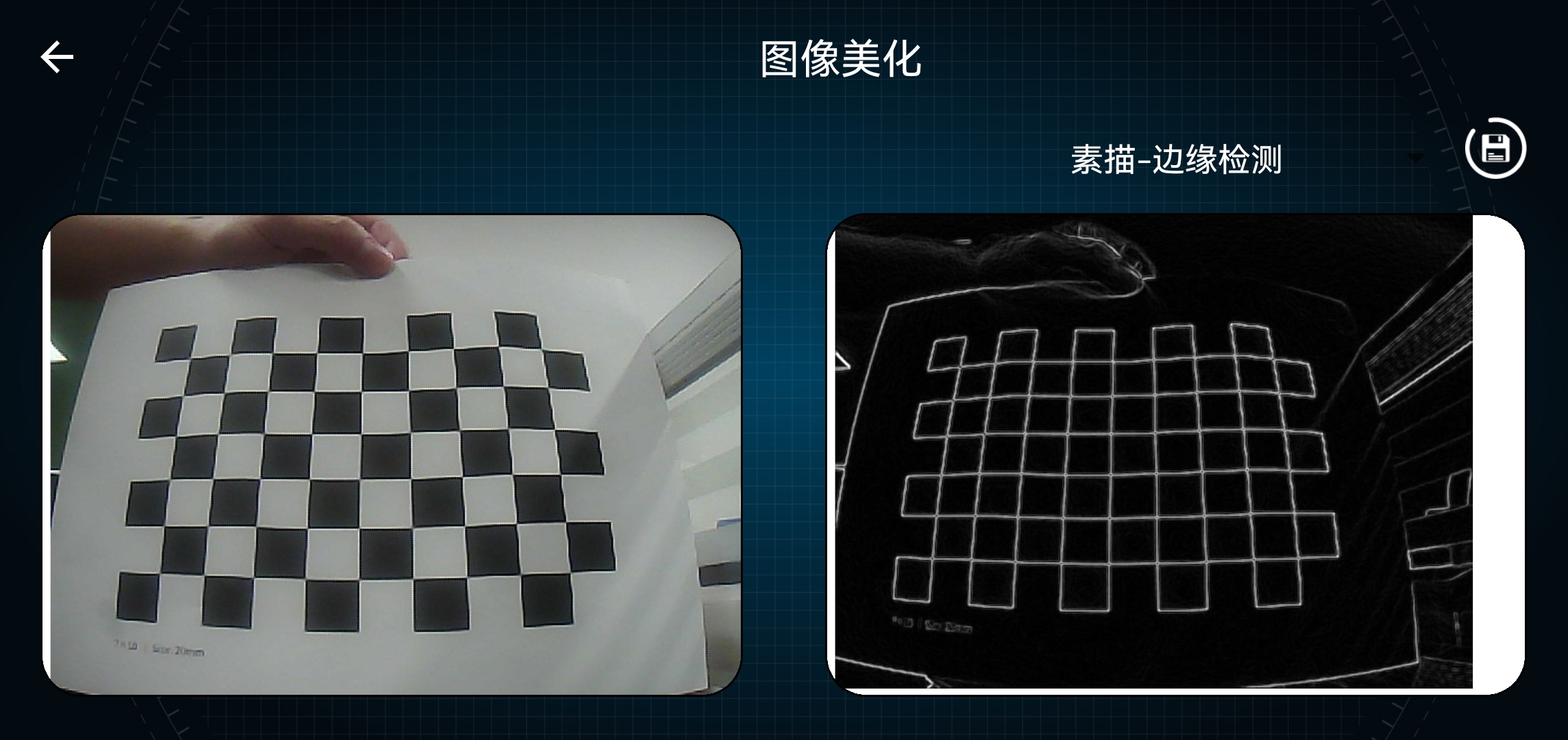
右边可以选择两种特效【素描-边缘检测】和【动感-轮廓检测】,下图为两个特效展示效果图。
右上角的保存图片按钮,可以将当前美化的画面保存到手机相册,相册名称为【YahboomAlbum】。此功能需要APP打开存储数据权限。

3.4、激光雷达

在主界面点击【激光雷达】图标,会出现以下界面。

激光雷达总共有三个功能,分别是【雷达避障】、【雷达跟踪】、【雷达警卫】,点击对应的按钮开启功能,再次点击可关闭功能。下方滑动条可以在功能开始前调节参数,包括雷达检测距离、雷达扫描小车前方角度和小车速度,其中【小车速度】只在【雷达避障】功能上有作用,【检测距离】和【扫描角度】在三个功能都有作用。
【雷达避障】:在激光雷达设置的检测范围内,自动避开前方障碍物。
【雷达跟踪】:在激光雷达设置的检测范围内,自动跟踪最近的物体。
【雷达警卫】:在激光雷达设置的检测范围内,车头自动转向最近的物体。
3.5、AR世界
在主界面点击【AR世界】图标,会出现以下界面。

AR世界玩法需要用【棋盘格】纸作为辅助,点击右边的按钮,选择其中一个要显示的形状,并且将【棋盘格】放到摄像头前方。例如上图中所示,选择的是小风车图形。再次点击按钮可以关闭显示。
3.6、智能追踪

在主界面点击【智能追踪】图标,会出现以下界面。
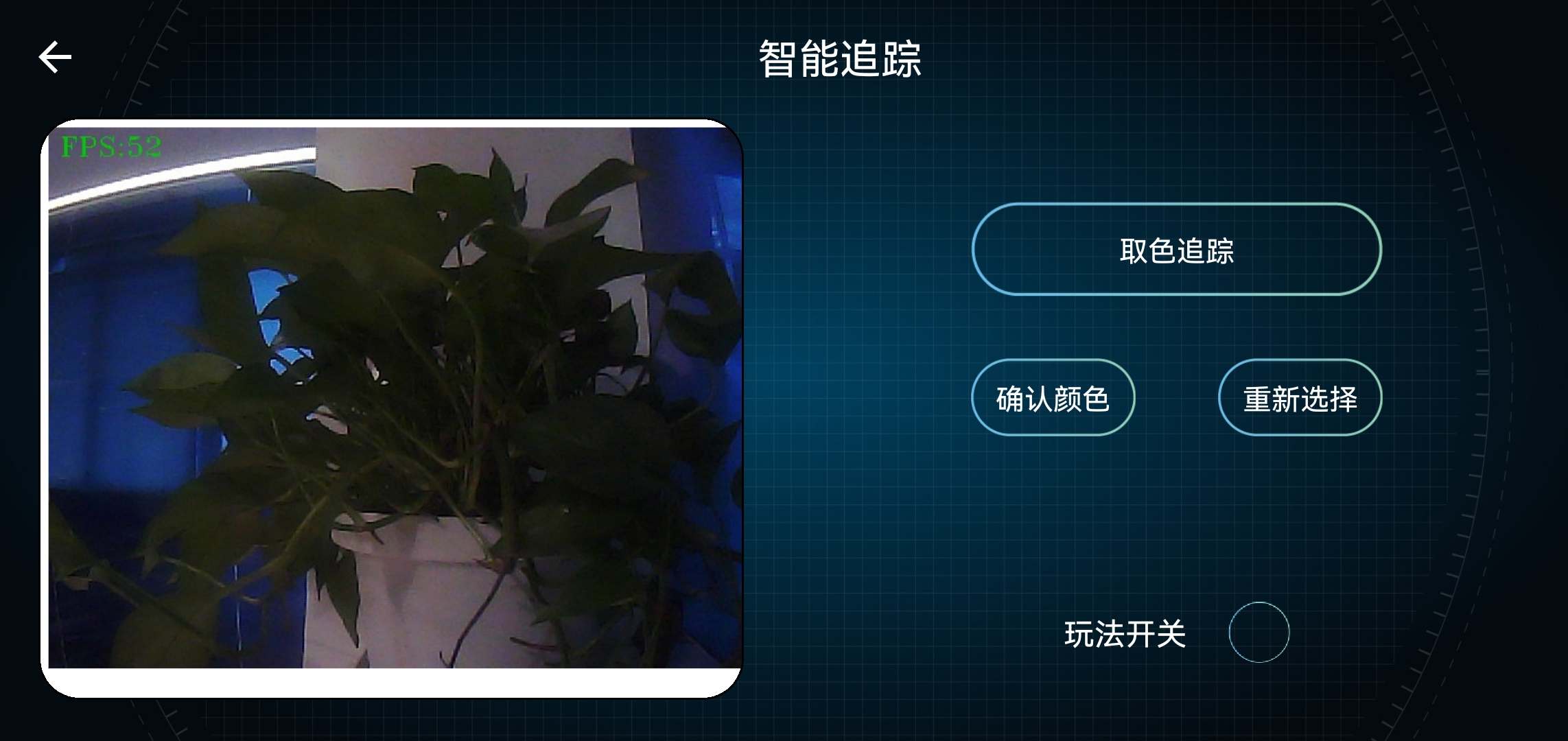
智能追踪玩法主要功能是先识别一个颜色的HSV值,然后经过算法处理摄像头中是否存在该颜色相近的物体,如果有就画个圆圈,并且摄像头追踪该物体。
此功能需要先点击【取色追踪】按钮开启和关闭功能,如果是第一次使用时,会自动出现一个小方框,我们只需要把要识别的颜色填满整个小方框,然后按下【确认颜色】按钮。确认颜色后,系统会保存到系统用户目录下的Transbot/transbot/TransbotTrackerHSV.text文件,下次开启【取色追踪】功能则不需要再次识别,会自动读取该文件的值。
如果需要重新识别颜色,请点击【重新选择】按钮,系统会自动显示小方框,填满要识别的颜色后,点击【确认颜色】即可。
【玩法开关】点击后开启小车的摄像头云台追踪,如果是普通相机版本,则控制摄像头云台的X轴和Y轴运动追踪颜色,如果是深度相机,则控制摄像头云台的X轴转动追踪颜色。
3.7、智能巡逻

在主界面点击【智能巡逻】图标,会出现以下界面。

智能巡逻功能总共有四种路径,点击右边图形,小车会按照图形自动运动类似的路径,再次点击关闭功能。
下方的【线速度缩放比例】和【角速度缩放比例】可以根据不同场地,调节小车运动更加准确。
3.8、自动驾驶
在主界面点击【自动驾驶】图标,会出现以下界面。
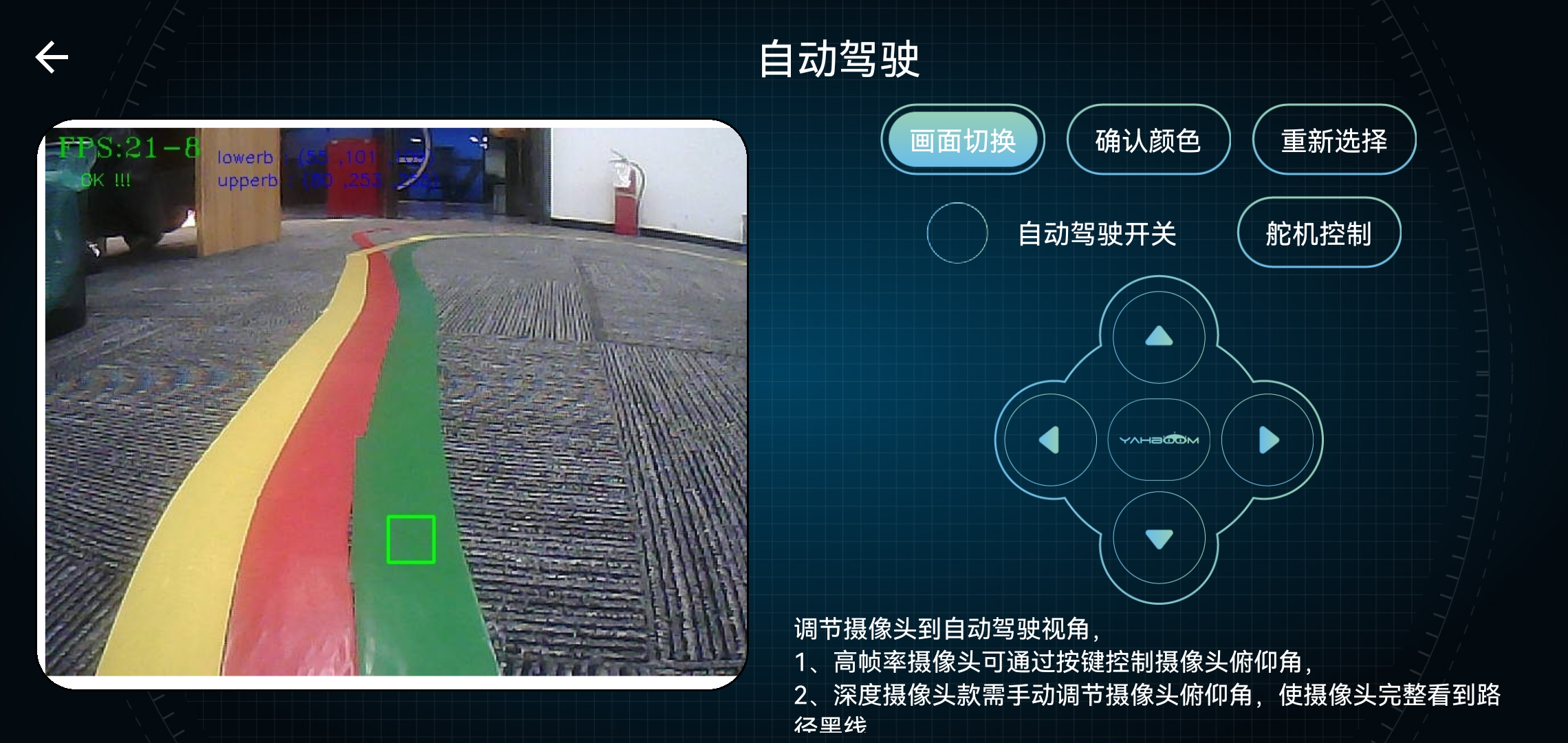
自动驾驶功能界面分为两个部分,左边显示摄像头画面,右边负责控制功能。功能操作与【智能追踪】的操作方式类似。
【画面切换】:切换原始画面和二值图像画面,二值图像画面将符合已识别的颜色显示为白色,将其他颜色显示为黑色。
【确认颜色】:保存小方框中要识别颜色的HSV值到系统用户目录下的Transbot/transbot/TransbotFollowHSV.text文件,下次进入【自动驾驶】不需要再次识别,会自动读取该文件的值。
【重新选择】:重新识别颜色,显示小方框,填满要识别的颜色后,点击【确认颜色】即可。
【自动驾驶开关】:启动或关闭小车电机运动,点击文字左边圆圈打开后,Transbot会根据摄像头画面识别到的颜色,经过算法处理,实现自动巡线功能。再次点击圆圈关闭小车运动。
【舵机控制/小车控制】:点击此按钮可以调节下方的控制盘是控制舵机云台还是控制电机运动,中间按钮功能是舵机归中或者电机停止。

当开启【自动驾驶开关】后,控制小车的方向键会替换成PID参数调节器,每次只能调节一个参数,触摸对应的PID文字左边的圆圈,选择修改的参数,比如选中P,则会显示当前P值,再点击左边【+】号可以增加数值,点击右边【-】号减少数值。
如果出现调试的PID参数效果不好,可以点击右边的【重置】按钮,在弹出的对话框选择【确定】将PID参数恢复到出厂配置。

3.9、使用指引

在主界面点击【使用指引】图标,会出现以下界面,颜色校准说明,点击【下一步】。

在此界面下,主要功能是微调自动驾驶和智能追踪功能识别颜色的HSV值。在右上边可以选择【自动驾驶颜色校准】或者【智能追踪颜色校准】,两个功能只能选择其中一个。
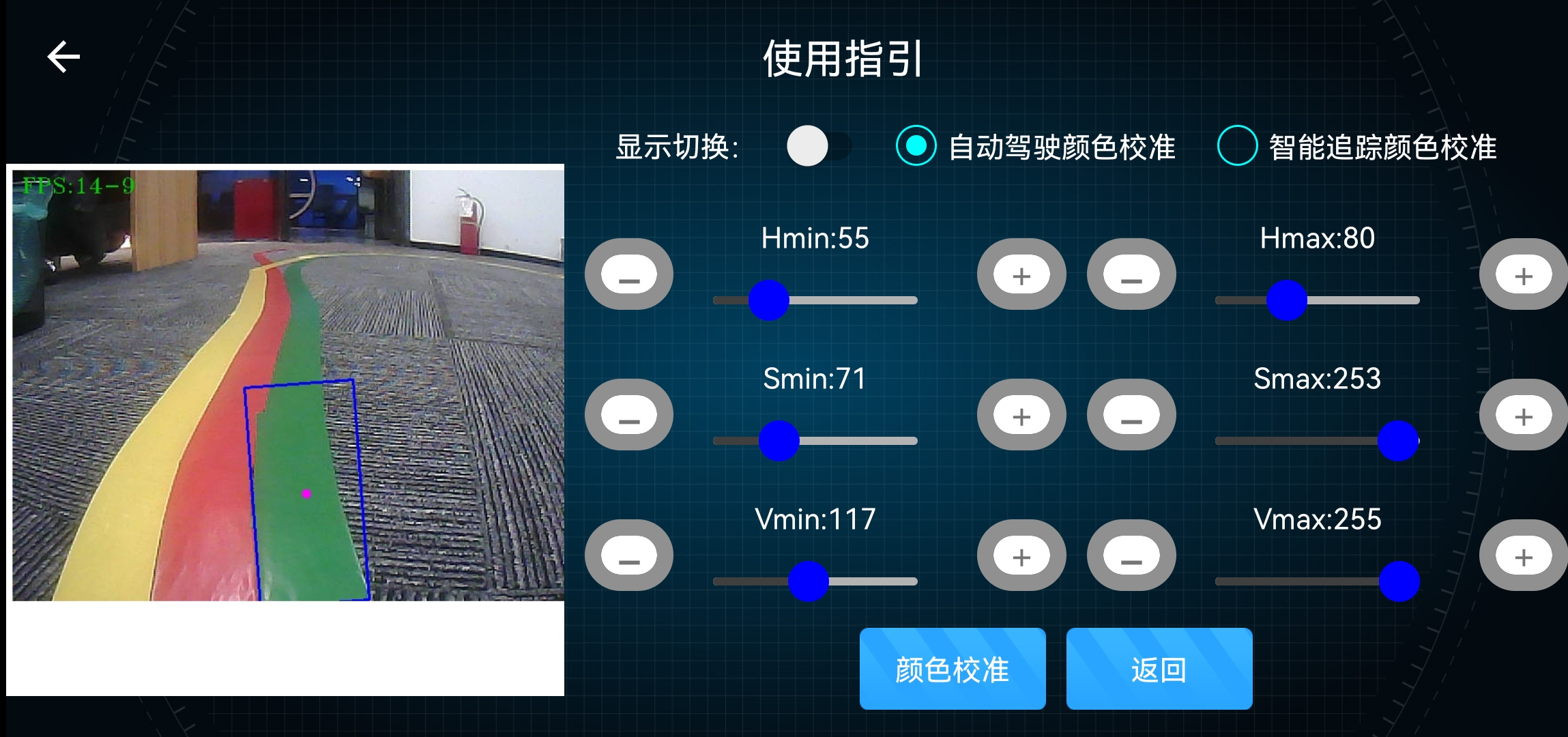
【显示切换】:切换原始画面和二值图像画面,二值图像画面将符合已识别的颜色显示为白色,将其他颜色显示为黑色。
【颜色校准】:保存颜色校准的数据到TransbotFollowHSV.text或TransbotTrackerHSV.text文件中,供【自动驾驶】或者【智能追踪】功能使用。
颜色校准说明:请选择自动驾驶颜色校准或者智能追踪颜色校准,接着把Transbot摄像头对准要识别的颜色,然后点击【显示切换】开关,通过HSV滑块进行微调,效果是识别颜色区域为白色,其他为黑色,表示调试成功,点击【颜色校准】保存数据,最后点击【返回】。