1、机械臂控制
官网:http://docs.ros.org/en/melodic/api/moveit_tutorials/html/index.html
单目MoveIt:~/software/transbot_library/src/transbot_config_camera
Astra_MoveIt:~/software/transbot_library/src/transbot_config_astra
机械臂控制功能包:~/software/transbot_library/src/transbot_description
玩此功能前需将大程序和所有打开的功能关闭,MoveIT建议在虚拟机运行。(电脑须有独立显卡!!!)
1.1、启动
本节课主要是将真机与MoveIT仿真实现同步操作。以树莓派、单目相机配置为例,Astra配置类似。建议将虚拟机设置为主机,MoveIT启动会比较慢,在虚拟机里启动后,再将树莓派设置为从机。
虚拟机端(主机)
roslaunch transbot_config_camera demo.launch # 单目相机 roslaunch transbot_config_astra demo.launch # astra树莓派端(从机)
xxxxxxxxxxrosrun transbot_description 03_machine_move.py
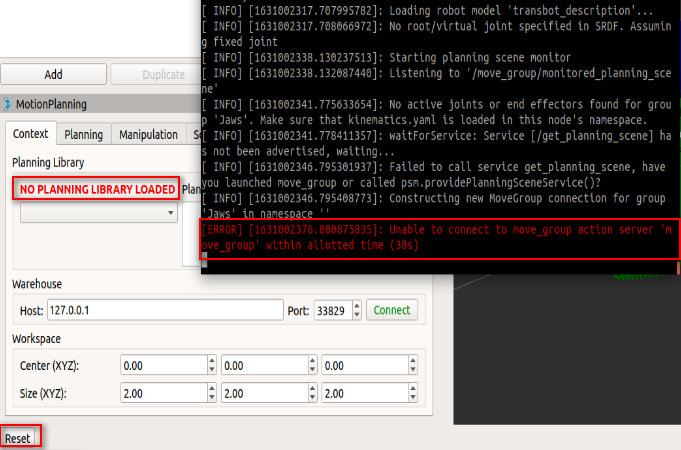
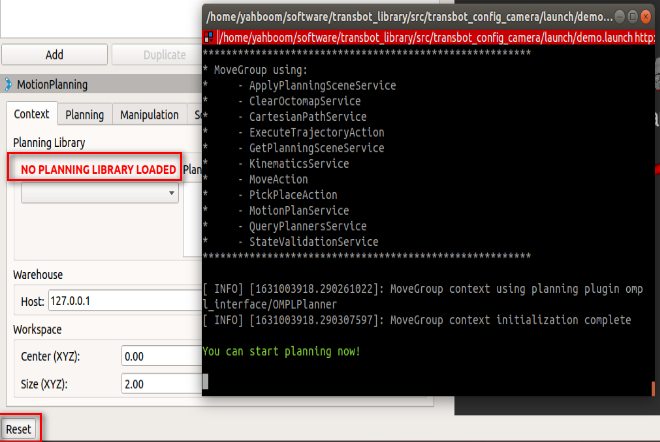
MoveIt仿真环境启动比较慢,耐心等待,观察终端,出现如下图所示错误,解决方法如图所示,如果终端报错且运动规划库未加载,点击左下角【Reset】,重新加载即可。起初是在加载的过程中,不要着急点击【Reset】,如果还没加载完就点击,系统就会重新加载,这样子就启动不了啦。
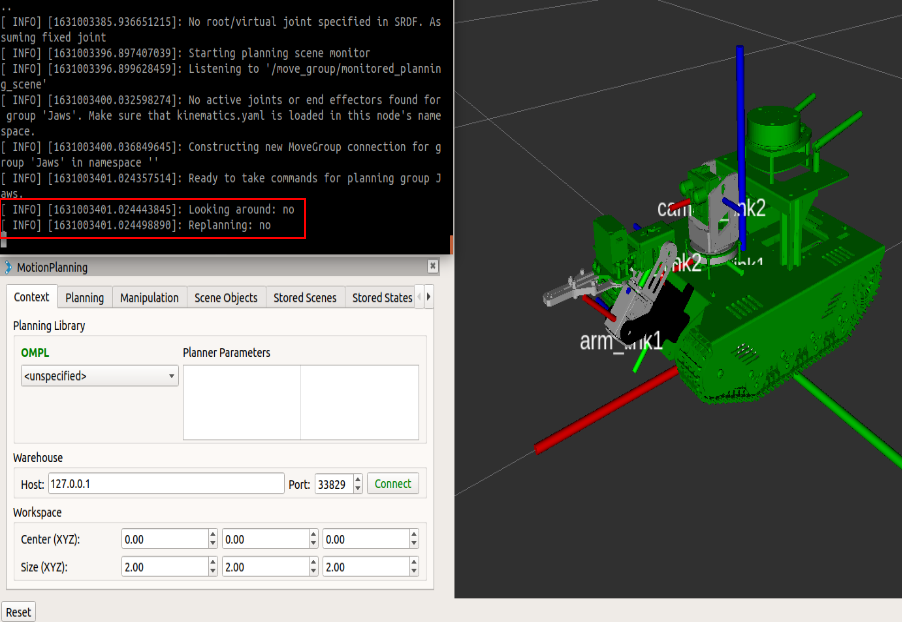
如下图所示,终端出现【Replanning:yes】,且Planning Library下方出现绿色【OMPL】,则启动成功。
示例图片
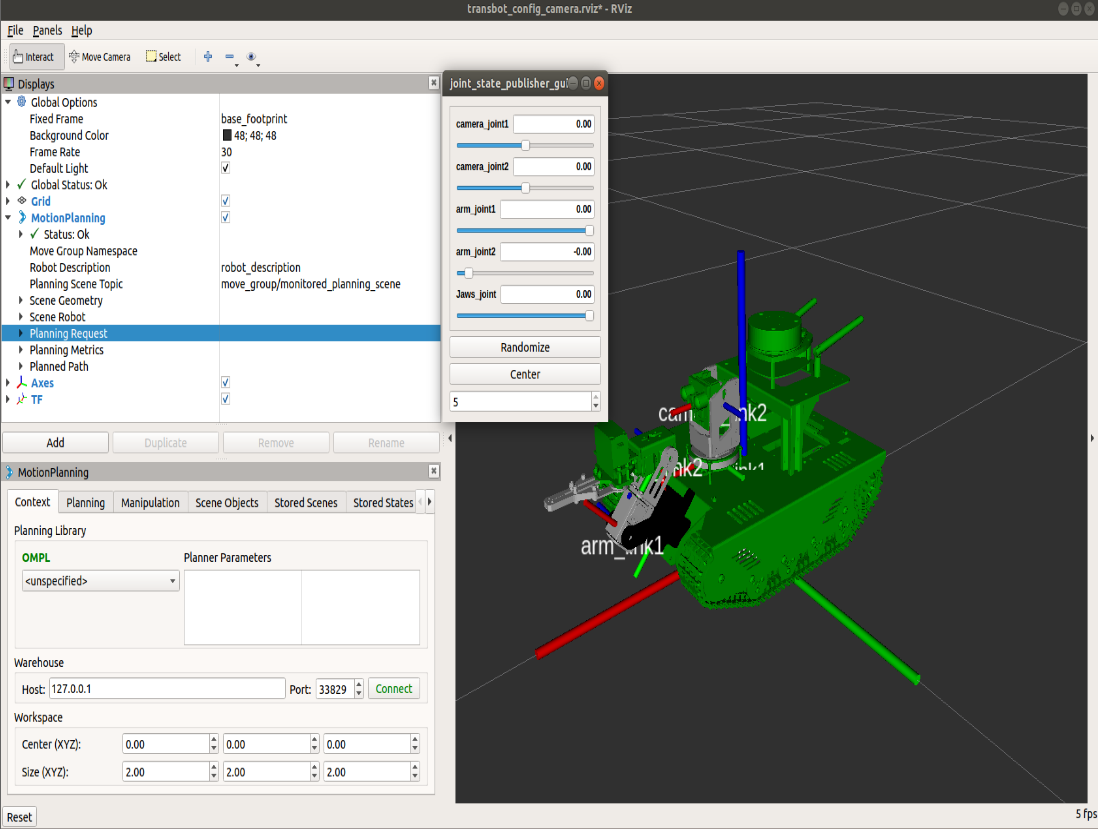
待启动成功后,如上图所示,滑动【joint_state_publisher_gui】的滑动条,机械臂和云台舵机会做出相应的动作,操作过程中,不可滑动太快,以免出现事故。
【camera_joint1】:云台舵机左右旋转,左正右负。
【camera_joint2】:云台舵机上下旋转,上正下负。
【arm_joint1】:靠近车身的关节,数据越小越往下。
【arm_joint2】:机械臂第二关节,数据越小越往下。
【Jaws_joint】:夹爪,数据越小越张开。
【Randomize】:随机产生动作,在没有安全防护措施下,不可点击,很危险!!!
【Center】:一键归中,刚打开时,默认处于归中位置,此时点击,看不出什么反应。
1.2、源码解析
demo.launch
xxxxxxxxxx <arg name="use_gui" default="true" /> <arg name="use_rviz" default="true" /> <!-- If needed, broadcast static tf for robot root --> <!-- We do not have a robot connected, so publish fake joint states --> <node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" unless="$(arg use_gui)"> <rosparam param="source_list">[move_group/fake_controller_joint_states]</rosparam> </node> <node name="joint_state_publisher" pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" if="$(arg use_gui)"> <rosparam param="source_list">[move_group/fake_controller_joint_states]</rosparam> </node> <!-- Given the published joint states, publish tf for the robot links --> <node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" respawn="true" output="screen" />... ... <!-- Run Rviz and load the default config to see the state of the move_group node --> <include file="$(find transbot_config_camera)/launch/moveit_rviz.launch" if="$(arg use_rviz)"> <arg name="rviz_config" value="$(find transbot_config_camera)/rviz/transbot_config_camera.rviz"/> <arg name="debug" value="$(arg debug)"/> </include>启动时,GUI控制器和rviz的设置。
py文件:03_machine_move.py
订阅MoveIt发布出来的【/joint_states】话题,获取MoveIt中机器人的当前位置。
xxxxxxxxxxsubscriber = rospy.Subscriber("/joint_states", JointState, JointTopic)回调函数【JointTopic】
xxxxxxxxxxdef JointTopic(msg): # 如果不是该话题的数据直接返回 if not isinstance(msg, JointState): return if len(msg.position) == 10: joints1 = (msg.position[0] * RA2DE) + 90 joints2 = -(msg.position[1] * RA2DE) + 90 joints3 = (msg.position[2] * RA2DE) + 225 joints4 = (msg.position[3] * RA2DE) + 45 joints5 = (msg.position[4] * RA2DE) * 5 / 3 + 180 bot.set_pwm_servo(1, int(joints1)) if int(joints2) > 140: joints2 = 140 bot.set_pwm_servo(2, int(joints2)) bot.set_uart_servo_angle_array(joints3, joints4, joints5) elif len(msg.position) == 9: joints1 = (msg.position1 * RA2DE) + 90 joints2 = (msg.position2 * RA2DE) + 225 joints3 = (msg.position3 * RA2DE) + 45 joints4 = (msg.position4 * RA2DE) * 5 / 3 + 180 bot.set_pwm_servo(1, int(joints1)) bot.set_uart_servo_angle_array(joints2, joints3, joints4)以单目相机为例,打印【msg.name】、【msg.position】消息如下:
xxxxxxxxxxmsg.name: ['camera_joint1', 'camera_joint2', 'arm_joint1', 'arm_joint2', 'Jaws_joint', 'right_joint2', 'right_joint3', 'left_joint1', 'left_joint2', 'left_joint3']msg.position: (0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0)【msg.name】的内容与【joint_state_publisher_gui】相对应,['camera_joint1', 'camera_joint2', 'arm_joint1', 'arm_joint2', 'Jaws_joint']是我们所需要关注的。